【经验】R CAR V3M的yocto环境切换实操

R CAR V3M通常用于前装的ADAS,DMS,以及环视等应用,开发环境为yocto3.19,linux,QNX等系统,通常情况下都需要下载yocto开发环境熟悉开发,需要100G左右的硬盘空间,如果要更换yocto的版本,重从下载整个环境,会导致硬盘空间成倍增加,浪费大量硬盘容量,本文介绍一种切换版本的方法,同时可以加快环境的下载编译进度。
当我们正确下载编译完R CAR V3M的yocto3.21版本后,如果我们需要切换到yocto3.19版本,如果从头开始做下载编译的步骤,整个过程时间很长,同时硬盘空间又会增加70G以上,此时,首先确认3.21.0版本和3.19版本的区别:


下面的是3.19版本:
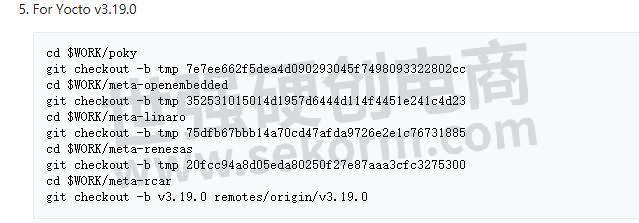

对比可以看出,主要区别的是meta-RENESAS,meta-rcar,另外几个仓库是一样的版本,所以需要这里切换meta-renesas,meta-rcar的版本到3.19,通过删除分支命令git branch -D tmp;切换分支命令git checkout master;查询分支命令git branch等命令,同时运行需要切换的分支:
git checkout -b tmp 20fcc94a8d05eda80250f27e87aaa3cfc3275300
git checkout -b v3.19.0 remotes/origin/v3.19.0
git checkout -b v3.19.0-release5.0.2 remotes/origin/v3.19.0-release5.0.2
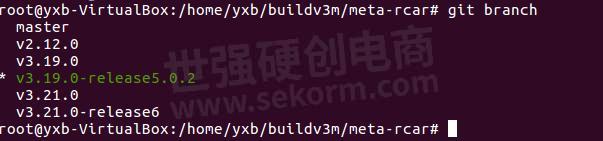
切换后如下图:

然后删除build/下面除了downloads目录之外的所有目录:

最后运行elinx上的后续步骤,就可以快速的进行下载编译,这个过程比之前下载编译3.21版本的时间会少很多,通常几个小时内就可以编译完成了,并且也不会增加更多的硬盘空间。这是因为在下载编译3.21版本的时候已经把大部分的需要下载的包都已经下载在build/downloads,大部分的包是一样的,只有一小部分版本不一样的包会重新下载为yocto3.19的,这样我们在编译过第一次yocto环境后,需要切换到别的版本时,就可以按照本文的操作,即快速,又不会占用更多的硬盘空间了。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由Bill提供,版权归世强硬创平台所有,非经授权,任何媒体、网站或个人不得转载,授权转载时须注明“来源:世强硬创平台”。
相关推荐

【经验】解析瑞萨R CAR V3M DDR3 DQ眼图测试实操以及注意点
瑞萨R CAR V3M开发产品功能完成后,一般需做DDR稳定性,信号质量的测试,对一些大客户可通过DDR供应商的示波器来测试DDR信号质量,而另外瑞萨提供一个眼图测试固件,可以大概看一下读写DDR时的DQ眼图质量。本文将对其DQ眼图测试实操以及注意点进行介绍。
设计经验 发布时间 : 2022-05-13

【经验】R CAR V3M并口摄像头开发调试注意点
R CAR V3M的eagle开发板是可以接入摄像头的,通过mipi csi接口接入,有时候客户会需要通过并口接入V3M,比如bt656,bt601,此时在eagle开发板上是没办法验证测试的,本文记录了在实际开发中并口接入的调试注意点,摄像头采用的美信的max96705+OV490(isp)+OV9284(sensor),解串器采用max96708,并口输出。
设计经验 发布时间 : 2021-07-06

【经验】瑞萨R CAR V3M VI0接入摄像头时钟信号EMC超标问题解决方法
Renesas的片上系统R CAR V3M开发DMS产品时,摄像头通过DVP并口接入V3M的VI0口,当PCLK为96MHZ时,可以出图,但是EMC超标,摄像头端PCLK改为64MHZ,同样出图,EMC也超标了,本文通过硬件电路修改的方法使EMC测试通过。
设计经验 发布时间 : 2022-04-25

【经验】瑞萨R CAR V3M无法烧录固件到flash的解决办法
R CAR V3M作为DMS,环视,ADAS产品的方案主控,产品设计开发过程中,最为关键的是新打的板子回来后,烧录固件到flash,启动往往是最为关键的第一步,本文解决了新设计板子flash不支持,无法烧录固件flash的问题。
设计经验 发布时间 : 2021-06-12

【经验】解决车载SoC R-Car V3M通过MIPI CSI接入摄像头采集不到数据的问题
Renesas车载SoC R-Car V3M通过MIPI CSI接入摄像头时,同样的驱动程序,并且都可以正常生成/dev/video0设备,有些摄像头可以正常采集到图像,而有些会出现mipi csi报错,采集不到数据,本文解决此类问题,并说明原因。
设计经验 发布时间 : 2021-09-24

【经验】解析瑞萨R CAR V3M LVDS显示输出模块du输入时钟调试经验
采用瑞萨R CAR V3M开发DMS、CMS项目时,通过LVDS显示输出,屏的分辨率为1280*768 60帧,针对这个分辨率如何来选择是采用外部DU_DOTCLKIN还是内部du clk及如何配置使其频率符合液晶屏的规格,本文详细记录调试中需要注意的关键点。
设计经验 发布时间 : 2022-04-16

【经验】瑞萨片上系统R CAR V3M在R7核运行autosar系统I²C通讯偶发失败问题解决方法
Renesas片上系统R CAR V3M在R7核上运行autosar系统,通过I2C与PMIC通讯,喂狗,偶发喂狗失败,查找发现失败时I2C一直处于忙状态,并且无法恢复,本文记录此问题的解决方法。
设计经验 发布时间 : 2022-03-03

【经验】ADAS/DMS主控芯片R CAR V3M ISP DEMO程序编译报错问题解决方法
采用瑞萨R CAR V3M作为DMS,ADAS等产品的主控芯片,通常需要用到其中的ISP模块,瑞萨有提供对应的ISP测试程序和工程,通过测试DEMO程序来熟悉和调试ISP是使用V3M的ISP的一种方法,本文解决编译DEMO程序报错问题。
设计经验 发布时间 : 2021-06-02

【经验】R CAR V3M系统EMC在1.6GHZ是超标问题解决方法
R CAR V3M外接的DDR带宽最高1600Mbps,而在测量系统EMC的时候发现1.6GHZ情况下EMC超标问题,如果通过外部方法修改比较复杂,可以通过修改V3M内部寄存器来改变相应的频率,避开1.6GHZ来解决以上问题,本文记录修改寄存器改变频率过程。
设计经验 发布时间 : 2021-12-01

【经验】瑞萨R CAR V3M开发板start kit烧录minimon无打印,无法擦写flash问题解决办法
R CAR V3M开发板start kit使用时,出现烧录固件AArch32_Gen3_V3M_Scif_MiniMon_EAGLE_V0.09.mot无打印,无法擦写flash问题,本文记录了这些问题的解决方法。
设计经验 发布时间 : 2021-06-03

【经验】解决R CAR V3M编译linux内核not clean报错
R CAR V3M在开发过程中,我们编译完成yocto的开发环境后,可以通过命令bitbake linux-renesas –C compilem 单独编译linux内核模块,可以可以通过其他指定交叉编译器等方式编译,但是有时候突然会出现提示not clean,需要make mrproper等提示,本文记录解决过程。
设计经验 发布时间 : 2021-04-11

【经验】R CAR V3M摄像头调试bt601行场同步信号调试
摄像头模组通过解串器MAX96708的bt601接入R CAR V3M,采集到的图像出现不完整的现象,经过调试是行场同步信号设置没有写入寄存器,本文对LINUX设备树和驱动进行分析实操。
设计经验 发布时间 : 2021-07-21

R CAR V3M在软件开发过程中动态库使用报错的解决方法
R CAR V3M在开发ADAS,DMS等产品阶段,软件开发通常是分模块开发的,不同工程师之间通过接口调用进行接口调用,集成,本文主要记录了R CAR V3M在软件开发过程中动态库使用报错的解决方法。
设计经验 发布时间 : 2021-06-25

【经验】R CAR V3M在软件开发过程中动态库,以及静态库的编译方法
R CAR V3M在开发ADAS,DMS等产品阶段,软件开发通常是分模块开发的,不同工程师之间通过接口调用进行接口调用,集成,本文主要记录了R CAR V3M在软件开发过程中动态库,以及静态库的编译方法。
设计经验 发布时间 : 2021-06-25

【经验】R CAR V3M eagle板yocto3.21编译失效问题解决方法
瑞萨的R CAR V3M的开发环境采用的yocto,通常建议使用eagle板,可以验证摄像头的接入,以及显示输出,这在做ADAS,以及DMS等应用上是必须的,那么eagle板的开发环境推荐使用yocto3.21版本,然而在yocto3.21下载编译过程中指定了eagle板,出现了没有编译eagle板,并不报错的情况,本文来解决这个编译失效的问题。
设计经验 发布时间 : 2021-04-10

现货市场

授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论