【应用】R7F0C014单片机助力四轴飞行器控制飞行稳定的应用方案

本文介绍了R7F0C014 单片机在四轴飞行器控制方面的应用。
四轴飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。结构上,本次应用中使用四轴飞行器的飞行模式是X 模式,如图1所示,四轴飞行器的四个电机一对正转,一对反转使得垂直方向旋转的反扭矩平衡, 从而保证了飞行的稳定。四轴飞行器可以用作航拍、玩具等,在我们生活中已经越来越常见。
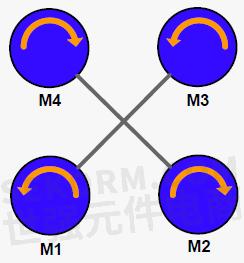
图1 四轴飞行器飞行模式(X 模式)
四轴飞行器的基本飞行状态可以分为:垂直飞行、水平飞行(俯仰和翻滚)、偏航飞行,分别如2所示:
1)垂直飞行:如下图(a)所示,同时增加或减少四个电机的转速,四轴飞行器则会垂直上升或下降;
2)水平飞行:如下图(b)所示,增加两个电机的转速,如电机M1 和M4,同时减少另两个电机M2和M3的转速,则四轴飞行器将向右飞行,同理可得向前、向后、向左方向的飞行方式;
3)偏航飞行:如下图(c)所示,增加两个电机的转速,如电机M1 和M3,同时减少另两个电机M2和M4的转速,则四轴飞行器将顺时针偏转,同理可得逆时针偏转的飞行方式。
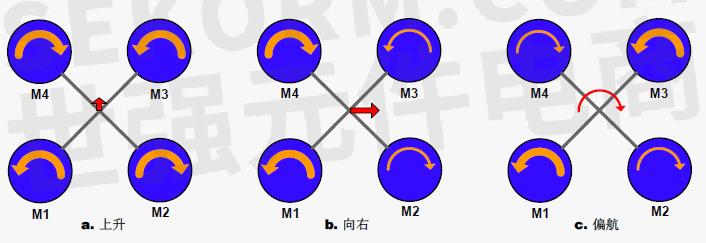
图2 四轴飞行器的飞行状态
PID 平衡控制
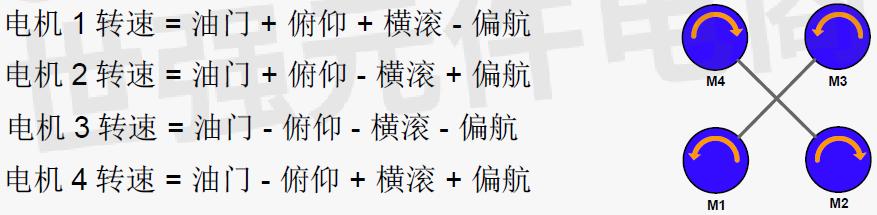
对于四轴飞行器平衡控制算法中,电机的转速并不是单独由油门来决定,而是以油门为基准整合上空间三轴俯仰(Pitch)、翻滚(Roll)和偏航(Yaw)的控制量来决定,如下公式所示。例如,四轴飞行器机头向下倾斜时(对应俯仰),为了达到平衡,电机3 和电机4 增大转速,电机1 和电机2 减小转速,此时俯仰控制量应该向负增大(控制量的正负由姿态芯片MPU6050 摆放决定)。
上述的三轴控制量则由本系统中使用的增量式PD 控制得到(PID 控制算法的一种)。以俯仰控制量为例,MPU6050 可以得到空间三轴的旋转角速率,正好是角度的微分,所以可以得到以下计算公式:
· 俯仰(Pitch)控制量 = P * 对应期望角度与实际角度的偏差 + D * 对应轴的角速率值
· 翻滚(Roll)控制量 = P * 对应期望角度与实际角度的偏差 + D * 对应轴的角速率值
· 偏航(Yaw)控制量 = D * 对应轴的角速率值
由于实际偏航角(Yaw)无法由MPU6050 测得,需要用电子罗盘,但是电子罗盘在四个电机的电磁作用下,精度受影响较大,所以上式中偏航(Yaw)控制量去除比例项,仅由微分项得到,MPU6050 的姿态刷新频率约为10ms 一次。
定高控制
高度的采集通过超声波模块HC-SR04 实现,由于测量距离的限制(约2cm-120cm),本系统仅适用于室内低空飞行,默认高度设定为60cm。定高部分算法,根据超声波检测的距离进行PID 控制,定高控制的输出量与初始油门(由机身本身的重力和当前电池电量决定)叠加作为当前油门,从而不断调节四轴飞行器油门值来实现垂直方向上的定高,而水平方向由于缺少GPS 相关模块,未能得到进行水平方向的控制量,所以本系统只能实现简单的悬停,超声波模块HC-SR04 置于四轴飞行器底部,高度刷新频率约为50ms 一次。
四轴飞行器演示板
本文使用的演示板如图3所示,瑞萨电子单片机R7F0C014通过I/O 端口模拟IIC 控制姿态芯片MPU6050,然后使用MPU6050 的硬件解算(内置的DMP 模块)直接获取和姿态相关的四元数等数据,再将四元数转化为欧拉角,最后以当前姿态角和捕捉的遥控数据为控制量,通过PID 控制四个电机以达到控制四轴飞行器姿态的目的。通过MPU6050 的硬件解算,可以避免复杂的姿态融合算法,从而减轻单片机的负担。
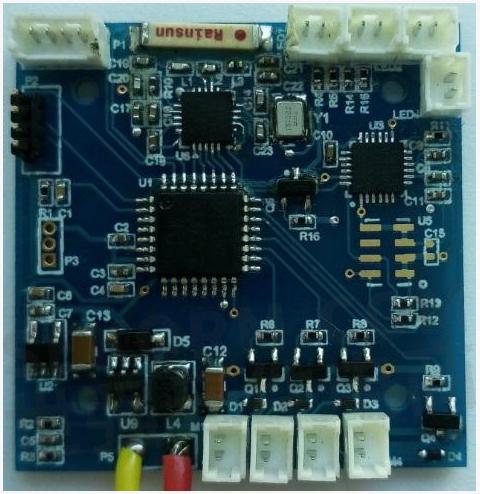
图3 四轴飞行器演示板
系统整机结构图如图4所示。为了硬件的安装和固定,演示板背面并没有贴装任何器件,而是直接固定在机架上。机架的底部用于放置锂电池,并固定超声波模块。

图4 四轴飞行器整机正面和背面
操作说明
1)启动:依次打开四轴飞行器和遥控器的电源开关,四轴飞行器的四个机翼处LED 将会闪烁两秒,然后变为常亮;
2)解锁:将遥控器左手边的油门拉至最低,油门摇杆上方的蓝色LED 点亮,解锁完成(注意:解锁完成前不要操作方向摇杆),此时,右手方向摇杆上方的蓝色LED 不断闪烁,表明和四轴飞行器通信正常,便可以开始遥控飞行器;
3)定高飞行:此功能仅限室内低空飞行(1.5 米以内)。解锁完毕后,拉高油门,待四轴飞行器达到一定高度后,按下遥控器最右下方按键,进入定高飞行,四轴飞行器会定高在默认设定的0.6 米处飞行。再次按下此按键,四轴飞行器将自动降落,落地后需将油门拉至最低。
注意:因四轴飞行器飞行过程中,电机的电流消耗较大,可以达到数安培,飞行时间只能持续几分钟,当机翼处LED 闪烁时,说明电池电量已过低,为了安全起见,请充电后再使用。
四轴飞行器演示板
四轴飞行器演示板结构如图5所示:
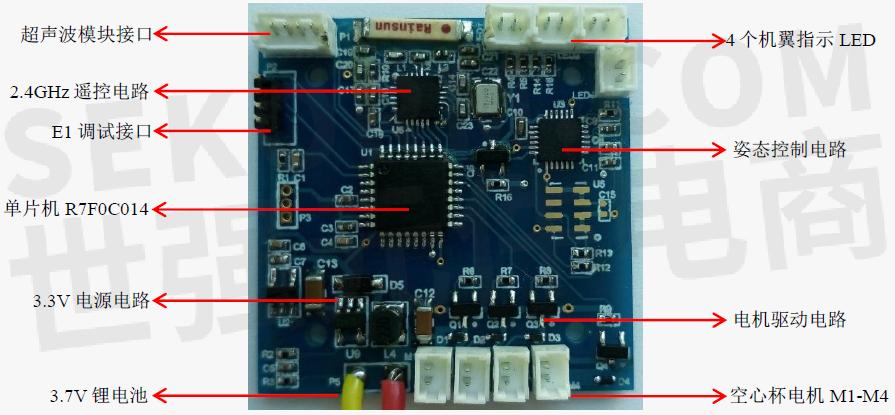
图5 四轴飞行器演示板结构
硬件结构框图
四轴飞行器演示板的硬件结构框图如图6所示:
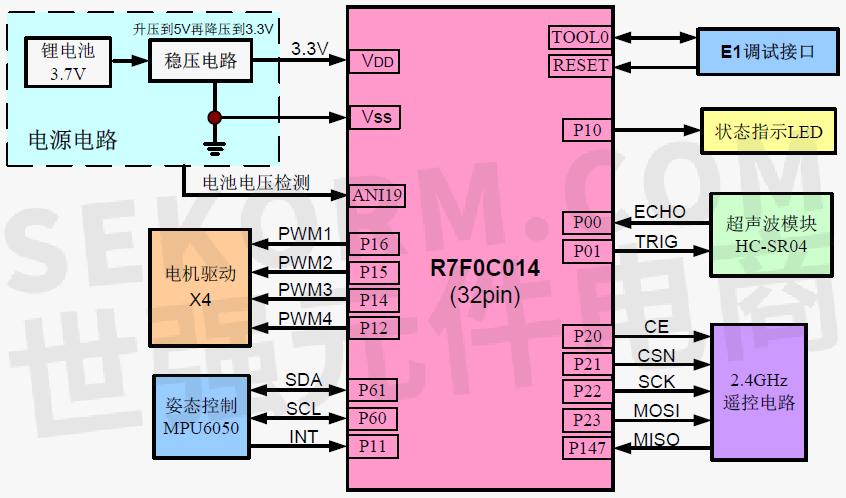
图6 四轴飞行器演示板的硬件结构框图
主控MCU
四轴飞行器演示板使用R7F0C014 作为主控MCU。R7F0C014 的Flash ROM 大小为128KB,RAM 大小为8KB。
电源电路
电源部分使用单块 3.7V 锂电池,经升压芯片 SP6641 将供电电压升到5V,然后经过稳压芯片MIC5205得到稳定的3.3V 供给系统。将电源电压先拉升到5V 再稳压是因为四个电机起转后,持续电流可达到数安培,而拉低电池电压,致使稳压芯片MIC5205 无法正常工作。电源电路如图7所示,其中,R2 和R3 用于A/D 采样,实时检测电池电压。
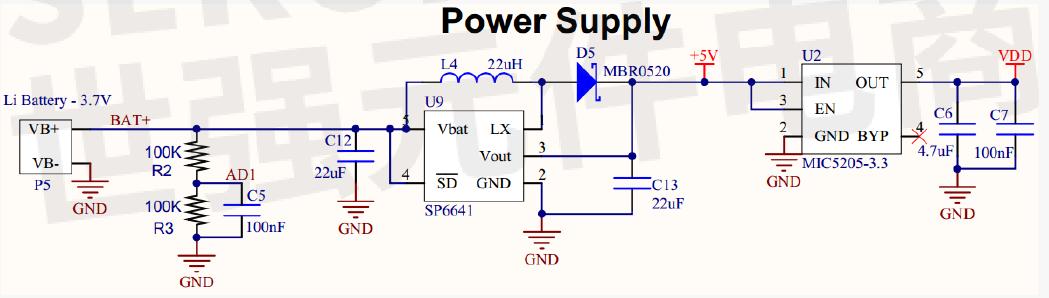
图7 四轴飞行器电源电路
电机驱动电路
单片机R7F0C014 通过内部定时器RD 模块产生4 路PWM 波形,驱动场效应管SI2302,可以根据占空比的大小,调节电机的转速。其中,电机使用的是四轴飞行器常用的820 有刷空心杯电机(直径8mm,长度20mm)。电机驱动电路如图8所示。
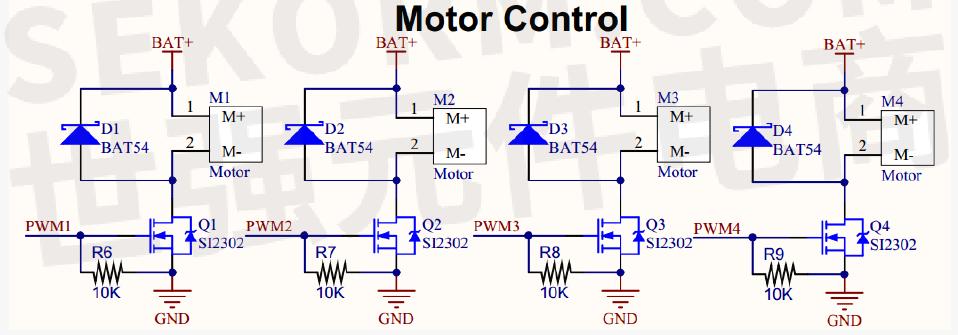
图8 四轴飞行器电机驱动电路
姿态处理电路
四轴飞行器的姿态通过传感器MPU6050 获得。MPU6050 是一款陀螺仪和加速度计合二为一的芯片,其内部含有DMP(数字运动处理器)模块,单片机可以通过IIC 接口直接读出和姿态角相关的四元数等数据,经过转换后就可以直接得到姿态角等数据,从而避免了复杂的姿态融合运算,减少了单片机的负担。姿态处理电路如图9所示,其中高度计MS5611 用于高空定高控制,但未在本次应用中使用,为保留部分。
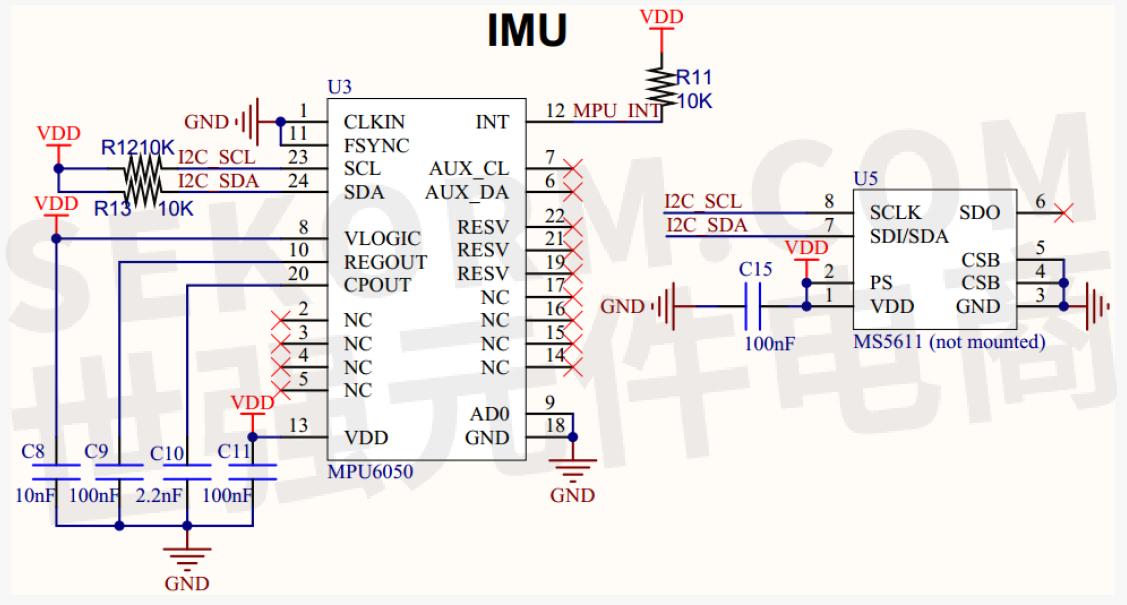
图9 姿态处理电路
2.4GHz 遥控接收电路
四轴飞行器对2.4GHz 遥控器的接收部分,采用的芯片是NRF24L01。单片机通过I/O 口模拟SPI 接口与其通信,从而完成遥控信号的读取。2.4GHz 遥控接收电路如图 10所示。

图10 2.4GHz 遥控接收电路
原理图
四轴飞行器演示板原理图如图11所示。
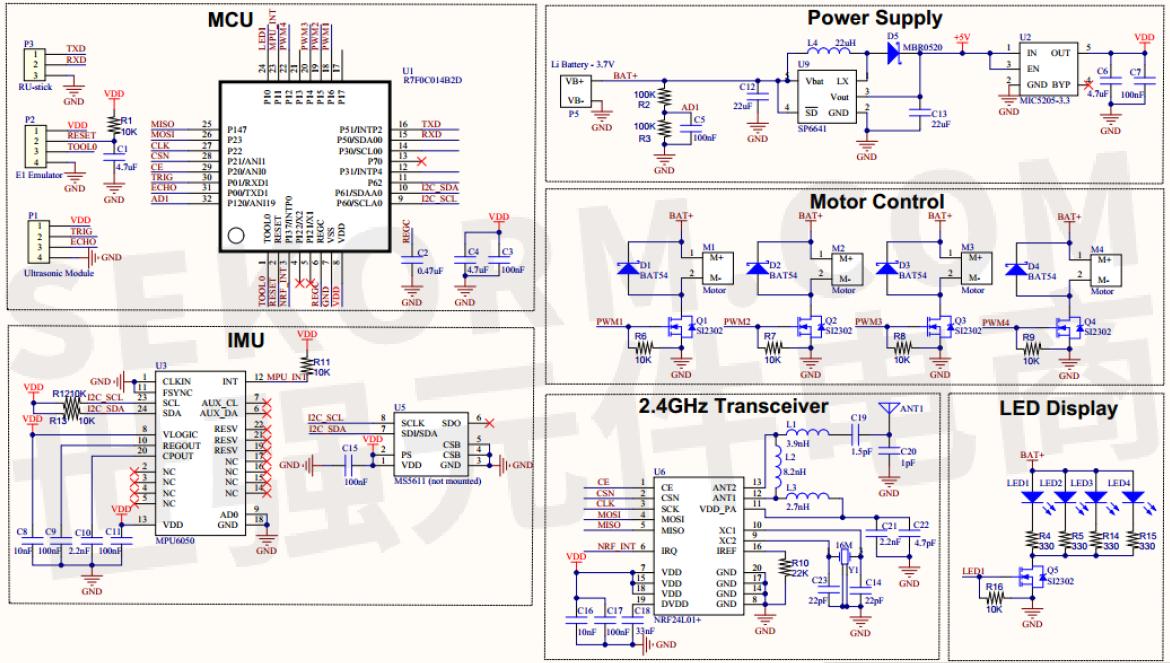
图11 四轴飞行器演示板原理图
PCB 图
四轴飞行器演示板PCB 图如图12所示。

图12 四轴飞行器演示板PCB图
- |
- +1 赞 0
- 收藏
- 评论 0
本文由杯中的清泉转载自RENESAS,原文标题为:【应用】R7F0C014单片机在四轴飞行器控制方面的应用,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

【应用】R7F0C001单片机在超声波测距以及直接驱动LCD的应用
本文介绍了瑞萨电子公司推出的R7F0C001单片机在超声波测距以及直接驱动LCD的相关应用。本文使用单片机R7F0C001 配合超声波模块HC-SR04 实现距离测量,并通过单片机R7F0C001 装载的LCD 驱动模块驱动LCD显示。
应用方案 发布时间 : 2018-12-19

【应用】R7F0C004单片机在微型电力监测仪演示板中的应用方法
本文介绍了瑞萨电子公司推出的R7F0C004单片机在微型电力监测仪演示板中的应用方法。本文所描述的微型电力监测仪,采用R7F0C004 单片机和专用的电能计量芯片,配合高精密的电流电压采样电路及LCD 显示器,实现对用电设备的全面监控。
应用方案 发布时间 : 2018-12-16

【应用】R7F0C014L2D 16位单片机控制尺寸为128x64的LCD点阵
本文以瑞萨电子公司推出的R7F0C014 16位单片机为实例,介绍了通过调用RL78系列单片机通用 API函数实现普通IO端口驱动 LCD面板的低成本应用。本文介绍了一组特定的API函数,通过调用其中的各个接口函数可以实现对RL78系列单片机通用IO的灵活应用,模拟产生LCD驱动波形。此外,还介绍了一种按键引脚和 LCD 驱动引脚复用的方法,最大限度节约 MCU 引脚资源。
应用方案 发布时间 : 2018-12-10

请问世强有没有“PIC12F510 美国微芯Microchip”单片机的替代型号?
推荐使用瑞萨RL78系列MCU代替Microchip的型号。具体料号:R5F10268ASP。可以在世官网搜索下该型号获取资料。
技术问答 发布时间 : 2018-12-07
寻找Microchip SST89V54RD2 16位单片机的替代品,最好是pin to pin兼容的,谢谢!
你好,该芯片为Microchip的产品早已经停产,建议使用新的产品来代替,推荐使用瑞萨RL78系列16位单片机来替代。详情可以在世强官网搜索RL78
技术问答 发布时间 : 2018-10-19

【经验】如何进行单片机中断处理?—以瑞萨RH850F1KM-S4为例
中断处理是我们在开发单片机时会经常用到的,本文以Renesas RH850F1KM-S4为例。找到;USE_TABLE_REFERENCE_METHOD .set 1,这句话决定了工程是否能够支持中断功能,将“;”删除,即可支持中断功能。
设计经验 发布时间 : 2022-06-08

【经验】瑞萨单片机RL78/F14调试开发注意事项
拿到单片机首先会比较关心硬件设计是否正确,是否可以下载调试,尤其是刚接触不久单片机的小伙伴,急于实践,拿前辈的图纸,往往还会出现设计缺陷,导致下载不畅,本文将结合瑞萨RL78/F14的单片机,介绍设计和调试常出现问题。
设计经验 发布时间 : 2022-12-16

瑞萨在Lab on the Cloud中新增DSP解决方案,基于RX单片机的DSP系统可实现在线访问
本期将为大家介绍的是Lab on the Cloud中的RX产品家族DSP解决方案,通过该方案用户可以在线连接RX单片机的评估板并体验DSP。
设计经验 发布时间 : 2023-11-16

【经验】单片机RH850的Smart Configurator OS Timer模块配置
在数字系统中,使用单片机时经常用到一个模块,那就是单片机定时器,单片机定时器的作用主要是在发生软件故障时,通过使器件复位(如果软件未将器件清零)将单片机复位,也可以用于将器件从休眠或空闲模式唤醒,还能用做精确延时处理,常被应用于时间控制、程序延时、对外部时间计数和检测等工作范围内。本文介绍以RH850单片机,使用Smart Configurator开发工具开发定时器模块。
设计经验 发布时间 : 2021-03-09

R7F0C020M2DFB 16位单片机 用户手册 硬件篇
描述- 本手册以理解R7F0C020 的功能并且以设计和开发其应用系统和程序的用户工程师为对象。
型号- R7F0C020M2DFB,R7F0C020,R7F0C020M2DFB-C#AA0

如何使用瑞萨RX单片机和串行LCD轻松实现HMI进化?
本解决方案使您能够用所有RX家族单片机实现对SPI连接TFT LCD模块的控制。用更少的硬件资源实现更复杂的HMI。
设计经验 发布时间 : 2023-11-15

【选型】RENESAS ( 瑞萨电子)通用IC--电源线性/单片机/SOC外围IC选型指南
目录- 电源线性IC 单片机、SoC外围IC
型号- M62213FP,R2A20124AFP,M5291FP,R2A20114SP,M62383FP,R2A20169NP,R2A20152SP,M51996AFP,M62333P,M62212P,M5291P,R2A20152NS*,R2A20158NP,M62368GP,R2A20150NP,HA17393A,M62320P,M62333FP,M62235P,R2A20168SA*,M62332P,M62211P,R2A20162SA,R2A20152SP*,M62237FP,RNA53A27FUS,M62371GP,R2A20168NP,RNA50C27AUS,M62367FP,M62290FP,R2A20162SA*,M62393FP,M62249FP,M62332FP,M62367GP,M62291GP,M62281P,M62213P,R2A20104FP,M62334P,HA1631D01,HA1631D02,R2A20169NP*,HA1631D03,HA1631D04,M62211FP,HA1630S08,M62393P,R2A20154SP,M62362FP,R2A20131SP,M62301FP,M51998FP,M62337P,M62393F,M62212GP,R2A20118ASP,R2A20152NS,HA16121FP,R2A20158NP*,R2A20162SP*,M62392P,R2A20016NP,R2A20164NP*,M51995AFP,M51995AP,R2S20020SP,R2A20124ASP,R2A20166SA,M62364GP*,M62212FP,M62235FP,M62253AGP,R2A20164SA,M62504FP,R2A20115SP,HA17358A,R2A20113ASP,R2A20162NS,HA1631S01,HA1631S02,RNA51953A,HA1631S03,HA1631S04,M62384FP,RNA51953B,R2S20031SP,R2A20162NS*,M62339P,R2A20166SA*,R2A20104SP,HA16114P,HA1630Q02,HA1630Q03,HA1630Q04,R2A20050ANS,HA1630Q05,HA1630Q06,M62352AGP,M62334FP,M62242AFP,RD40LD003,M51996AP,M62338P,HA1630Q01,M62342HP,M62293FP,M62303FP,M62353GP,M62364FP,M62376GP,M51998P,R2A20035SP,M62332,M62334,M62333,HA1630D01,HA1630D02,HA1630D03,R2A20168NP*,RNA51XX,M62244FP,HA1630D04,HA1630D05,HA1630D06,M62301SP,RNA52A10MM,R2A20154NS,R2A20168SP,HA16116FP,M62364GP,M62352FP,HA1630D07,R2A20010NP,HA1630D08,M62337FP,R2A20168SA,RNA50C27AMM,HA1631S01-04,R2A20178SP,R2A20164NP,RNA51957B,R2A20132SP,M62352GP,M62353AGP,M62363FP,M62294FP,HA16174P,HA1630D01-08,M62501P,RNA51957A,R2A20178SA,M62245FP,R2A20112ASP,HA1631D01-04,HA1630S01,HA1630S02,HA1630S03,R2A20121SP,M62362P,HA1630S04,HA1630S05,HA1630S06,HA16120FP,HA1630S07,RNA51ABXX,R2A20154SP*,R2S20030NP,M62215FP,M6236FP,M62501FP,M62370GP,M62320FP,HA16174FP,R2A20154NS*,M62353P,R2A20169SA*,M62343FP,M62220L,HA1630Q01-06,R2A20150SA,R2A20164SA*,M62216GP,R2A20114FP,R2A20118ASPR2A20131SP,M62242FP,M62392FP,R2A20178NP*,HA16114FP,R2A20133BSP,M62320GP,HA1630S01-08,M62343GP,M62354AGP,M62366GP,M62352P,M62354FP,R2A20162SP,RNA51958A,RNA51958B,M62339FP,R2A20178SP**,R2A20166NP,R2A20134SP,M6227XGP,M62216FP,R2S220031SP,M62290L,M62292FP,M62342FP,M62354GP,M62343P,M62220FP,R2A20178NP,R2J20071ANS,R2A20169SP,R2A20133ASP,R2J20052NS,M62281FP,M62342GP,M62342P,M62353FP,M62354P,R2A20166NP*,M62270GP,M62338FP,M62504P,R2A20169SA
国内哪家32位单片机做的好的
1 瑞萨科技 2 飞思卡尔半导体 3 Microchip Technology 4 NEC电子 5 英飞凌 6 东芝 7 Atmel 8 三星 9 恩智浦半导体(NXP) 10 意法半导体
技术问答 发布时间 : 2020-10-26

基于RX的数字电源转换能力用RX单片机实现图腾柱交错式PFC
本期以AC-DC电源控制为例,介绍如何使用RX单片机对图腾柱交错式PFC进行控制。
设计经验 发布时间 : 2023-11-14

【经验】解析Renesas单片机RE01系列使用e2 studio生成led初始代码的方法
初学者在接触一款MCU时,一个新的开发环境,最开始的实验应该就是IO口(PGIO)的高低电平控制了。本次我们通过使用e2 studio自带代码生成工具生成多个LED闪烁的程序,以此开启瑞萨RE01的学习之路。
设计经验 发布时间 : 2022-07-08

电子商城








现货市场

服务
测试1.2/50us-8/20us组合波,10/700us-5/320us组合波,8/20us单波。能够模拟雷电瞬变引起的浪涌冲击抗干扰测试,最高电压达20KV,电流达20KA。点击预约,支持到场/视频直播测试,资深专家全程指导。
实验室地址: 深圳/上海 提交需求>
定制水冷板尺寸30*30mm~1000*1000 mm,厚度1mm~50mm,散热能力最高50KW,承压可达3MPA;液冷机箱散热能力达500W~100KW。项目单次采购额需满足1万元以上,或年需求5万元以上。
提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论