【经验】灵动微电子MM32L013x中的LPTIM外设模块设置教程


低功耗技术旨在减少设备电流消耗,延长电池寿命,可以有效的延长产品的使用寿命。这就需要合理分配运行时间和空闲时间,在空闲时可以通过使MCU进入低功耗模式降低系统的功耗,在需要MCU工作时唤醒MCU,低功耗定时器(LPTIM)有助于降低功耗,特别是当系统处于低功耗模式时(如 stop模式)可以在休眠模式下实现外部脉冲计数功能。通过外部输入的触发信号,能够实现低功耗超时唤醒。LPTIM 具有外部时钟计数,超时唤醒功能和 PWM 输出等多种用途。本文主要介绍MM32全新低功耗系列MM32L013x产品中的LPTIM外设模块,它允许系统执行简单的任务,同时功耗保持在绝对最小。
一、LPTIM 简介
LPTIM 由一个 16 位计数器组成,可以为用户提供便捷的计数和定时功能。LPTIM 运行在 CORE 电源域,可以工作在低功耗模式下,具有低功耗的特点,当然也可以被当做一个普通的 16 位基础定时器来使用。
二、LPTIM 常见用途
①脉冲计数功能
②PWM 生成器
③周期性地超时唤醒sleep模式、stop模式
以上所有功能应用均为普通 TIM 所不能实现的,正是由于 LPTIM 的时钟源具有多样性,使得其能够在所有电源模式(standby模式除外)下保持运行状态。
三、LPTIM 主要特性
①16 位递增计数器,相当于 LPT_CNT 值由模块时钟驱动加一递增最大到 65535,并且包括一个 16 位比较寄存器和目标值寄存器
②3 位异步时钟预分频器,可以将输入进模块的时钟进行多种系数的预分频,包括:1/2/4/8/16/32/64/128 分频
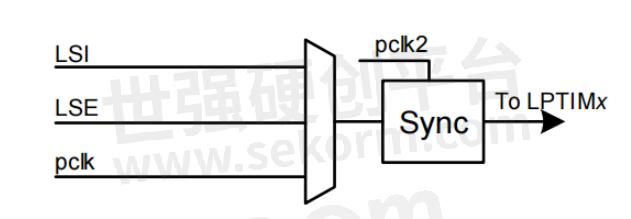
③多种内部和外部的时钟源可选,包括:LSI/LSE/PCLK2
④可以选择不同边沿的脉冲极性用作触发计数,触发源包括:LPTIM1_TRIGGER 引脚输入触发、COMP OUT 事件触发
⑤可以设定不同的 LPT_CMP 和 LPT_TARGET 值从而通过 LPTIM1_OUT 引脚输出不同占空比的PWM 波形或者方波
⑥可以设定不同的 LPT_TARGET 值从而进行不同时长的低功耗唤醒
⑦可以开启不同的中断,包括:外部触发、比较匹配和计数器溢出中断,在唤醒 STOP 模式时,除了需要使能相应的中断外,还需配置 EXTI_Line23 并且使能相关的功能
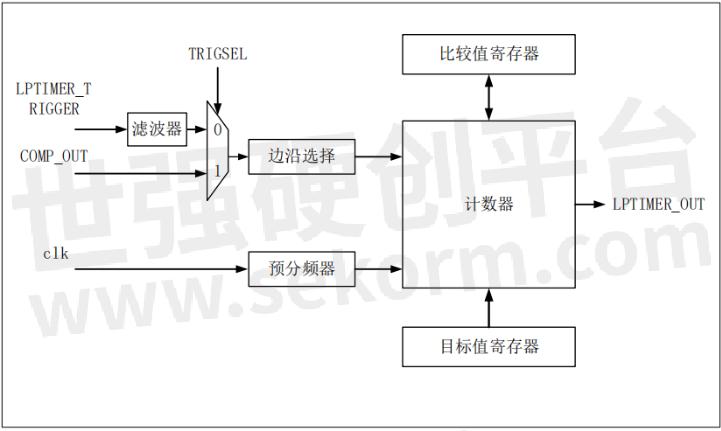
四、LPTIM 功能框图
LPTIM 的功能框图如下,主要包括了:触发源选择模块、时钟输入及分频模块、计数模块以及比较匹配输出单元等。
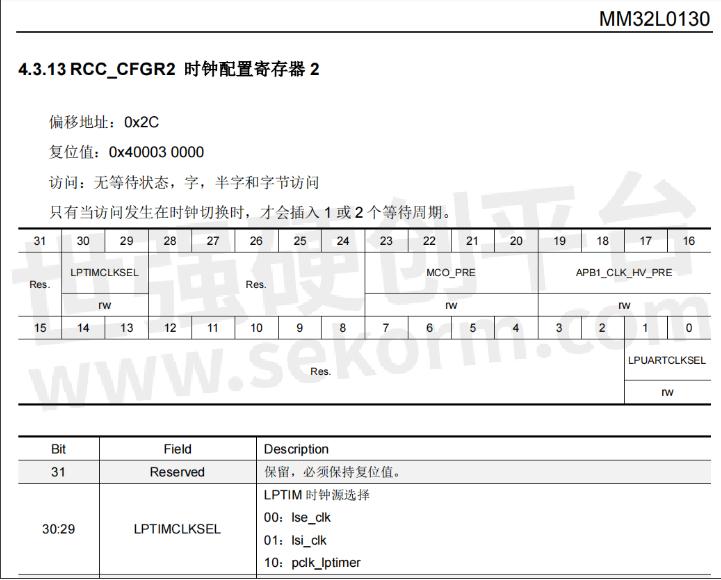
涉及到时钟选择的部分需要设置RCC_CFGR2[30:29],在 UM 手册中时钟配置寄存器2(RCC_CFGR2):
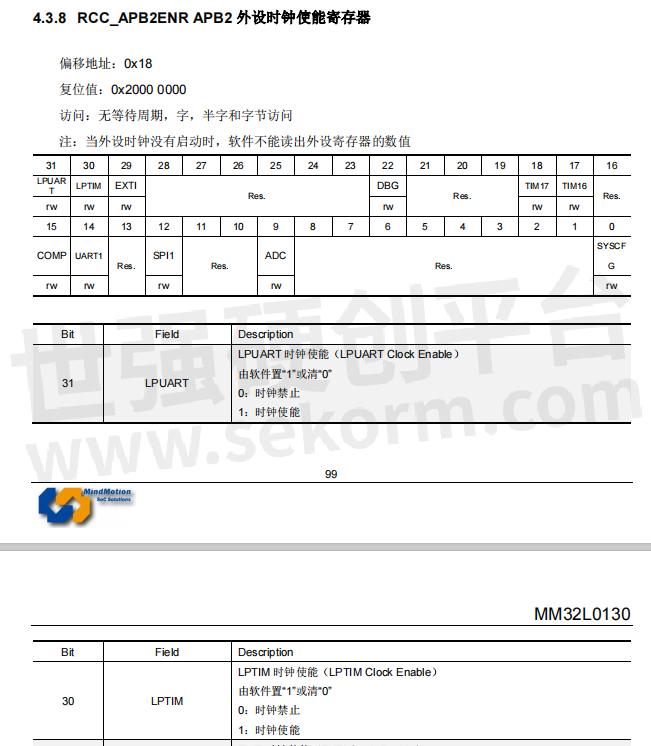
使能LPTIM时钟需要设置RCC_APB2ENR[31]位:
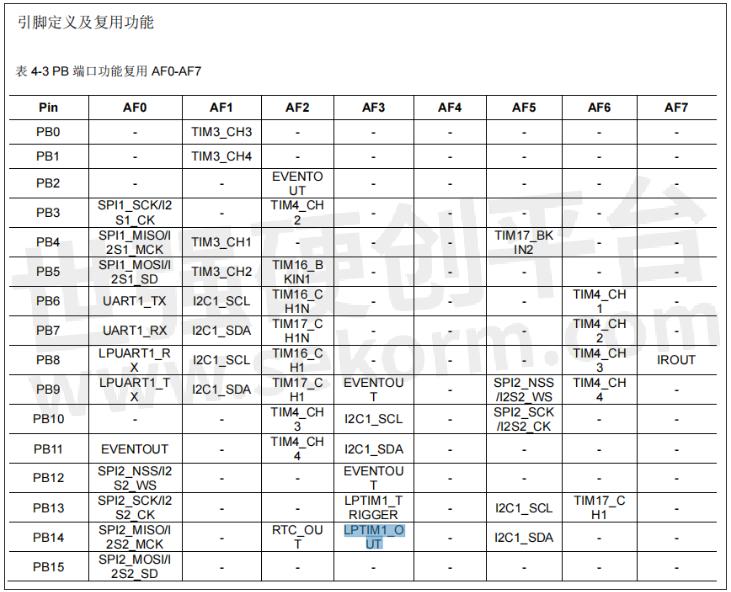
涉及到 LPTIM1_TRIGGER 和 LPTIM1_OUT 引脚的功能定义情况在 DS 手册中引脚复用及复用列表:
五、LPTIM 寄存器表
由于 MM32L013x 系列产品中只有一个 LPTIM 模块,所以在文档和程序中也习惯称作 LPTIM1,它的基地址为 0x40012800,所有寄存器设计为 16 位,预留出 16位保持 32 位对齐,寄存器占用情况如下:

其中 LPT_CFG 、 LPT_IE 、 LPT_CTRL 、LPT_CMP 、 LPT_TARGET 为可读可写操作的,LPT_IF 为可读并且写 1 清零操作的,LPT_CNT 为只读操作的,具体功能描述参见 UM 对应章节内容。
六、LPTIM 功能实现
6.1 溢出中断的普通定时器
①使能 APB2 总线上的 LPTIM 外设时钟,用于同步
②初始化配置 LPT_CFG 寄存器 MODE=0,计数器被触发后保持运行,直到被关闭为止
③初始化配置 LPT_CFG 寄存器 TMODE=00,选择普通计数器模式
④选择外部时钟或内部时钟作为计数器的时钟源
⑤配置 LPT_IE =1,使能 LPTIM 计数器溢出中断
⑥配置 LPT_CTRL 寄存器 LPTEN=1,使能 LPTIM 计数器
计数器使能后有两个周期的同步过程,同步完成后,计数器开始工作,计数达到目标之后回到 0 重新开始计数,并产生溢出中断
按上述流程的代码配置如下:
void LPTIM1_Init(u16 arr)
{
LPTIM_TimeBaseInit_TypeDef init_struct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_LPTIM1, ENABLE);
LPTIM_TimeBaseStructInit(&init_struct);
init_struct.ClockSource = LPTIM_PCLK_Source;
init_struct.CountMode = LPTIM_CONTINUOUS_COUNT_Mode;
init_struct.OutputMode = LPTIM_NORMAL_WAV_Mode;
init_struct.Waveform = LPTIM_AdjustPwmOutput_Mode;
init_struct.Polarity = LPTIM_Positive_Wave;
init_struct.ClockDivision = LPTIM_CLK_DIV1;
if(init_struct.ClockSource == LPTIM_LSE_Source) {
RCC_APB1PeriphClockCmd(RCC_APB1ENR_PWR | RCC_APB1ENR_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_LSEConfig(RCC_LSE_ON);
DELAY_Ms(5000);
while(!RCC_GetFlagStatus(RCC_FLAG_LSERDY));
LPTIM_CLKConfig(LPTIM1, LPTIM_LSE_Source);
}
else if(init_struct.ClockSource == LPTIM_LSI_Source) {
RCC_APB1PeriphClockCmd(RCC_APB1ENR_PWR | RCC_APB1ENR_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_LSICmd(ENABLE);
DELAY_Ms(500);
while(!RCC_GetFlagStatus(RCC_FLAG_LSIRDY));
LPTIM_CLKConfig(LPTIM1, LPTIM_LSI_Source);
}
else { //(init_struct.ClockSource == LPTIM_PCLK_Source)
LPTIM_CLKConfig(LPTIM1, LPTIM_PCLK_Source);
}
LPTIM_TimeBaseInit(LPTIM1, &init_struct);
LPTIM_SetTarget(LPTIM1, arr);
}
void LPTIMER1_IRQHandler(void)
{
if(LPTIM_GetITStatus(LPTIM1, LPTIF_OVIF)) {
LPTIM_ClearITPendingBit(LPTIM1, LPTIF_OVIF);
LED3_TOGGLE();
LED4_TOGGLE();
}
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = LPTIMER1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
}
s32 main(void)
{
DELAY_Init();
LED_Init();
LPTIM1_Init(4000 - 1);
NVIC_Configuration();
LPTIM_ITConfig(LPTIM1, LPTIE_OVIE, ENABLE);
LPTIM_Cmd(LPTIM1, ENABLE);
while (1)
{
LED1_TOGGLE();
LED2_TOGGLE();
DELAY_Ms(1000);
}
}
6.2 PWM 输出
①初始化中使用以上相同的步骤,需要额外配置 LPT_CFG 寄存器 PWM=1,选择 PWM 输出模式
②再配置 LPT_CMP 和 LPT_TARGET 寄存器,设定比较值和目标值,PWM 的占空比由比较值和目标值决定,输出在计数器值等于比较值翻转为 1,在等于目标值时翻转为 0
③另外需要配置一组 LPTIM1_OUT 引脚用于输出 PWM 波形,这里以 PB14 为例
代码配置如下:
void LPTIM_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_GPIO_ClockCmd(GPIOB, ENABLE);
//set PB14 as LPTIM1 Output Pin
GPIO_PinAFConfig(GPIOB, GPIO_PinSource14, GPIO_AF_3);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_14;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void LPTIM1_Init(u16 arr)
{
LPTIM_TimeBaseInit_TypeDef init_struct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_LPTIM1, ENABLE);
LPTIM_TimeBaseStructInit(&init_struct);
init_struct.ClockSource = LPTIM_PCLK_Source;
init_struct.CountMode = LPTIM_CONTINUOUS_COUNT_Mode;
init_struct.OutputMode = LPTIM_NORMAL_WAV_Mode;
init_struct.Waveform = LPTIM_AdjustPwmOutput_Mode;
init_struct.Polarity = LPTIM_Positive_Wave;
init_struct.ClockDivision = LPTIM_CLK_DIV1;
if(init_struct.ClockSource == LPTIM_LSE_Source) {
RCC_APB1PeriphClockCmd(RCC_APB1ENR_PWR | RCC_APB1ENR_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_LSEConfig(RCC_LSE_ON);
DELAY_Ms(5000);
while(!RCC_GetFlagStatus(RCC_FLAG_LSERDY));
LPTIM_CLKConfig(LPTIM1, LPTIM_LSE_Source);
}
else if(init_struct.ClockSource == LPTIM_LSI_Source) {
RCC_APB1PeriphClockCmd(RCC_APB1ENR_PWR | RCC_APB1ENR_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_LSICmd(ENABLE);
DELAY_Ms(500);
while(!RCC_GetFlagStatus(RCC_FLAG_LSIRDY));
LPTIM_CLKConfig(LPTIM1, LPTIM_LSI_Source);
}
else { //(init_struct.ClockSource == LPTIM_PCLK_Source)
LPTIM_CLKConfig(LPTIM1, LPTIM_PCLK_Source);
}
LPTIM_TimeBaseInit(LPTIM1, &init_struct);
}
s32 main(void)
{
DELAY_Init();
LED_Init();
LPTIM1_Init(4000 - 1);
LPTIM_SetCompare(LPTIM1, 4000 / 2 - 1);
LPTIM_SetTarget(LPTIM1, 4000 );
LPTIM_GPIO_Init();
LPTIM_Cmd(LPTIM1, ENABLE);
while (1)
{
LED1_TOGGLE();
LED2_TOGGLE();
DELAY_Ms(1000);
}
}
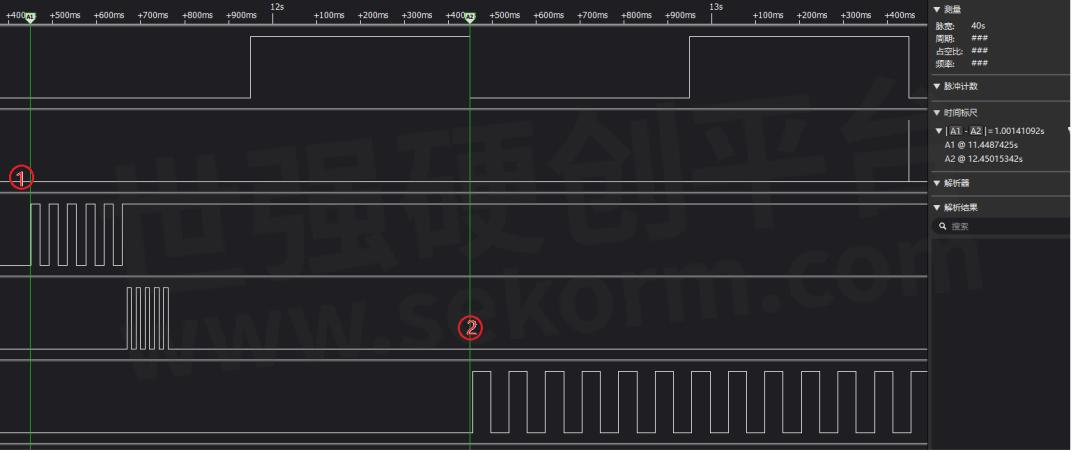
6.3 Trigger 脉冲触发计数
①初始化中使用以上相同的步骤,需要修改配置 LPT_CFG 寄存器 TMODE=01,选择 Trigger 脉冲触发计数模式
②配置 LPT_CFG 寄存器 TRIGSEL = 0,选择外部引脚触发计数
③配置 LPT_CFG 寄存器 TRIGCFG,选择外部触发信号的有效沿
④用户可以根据需求选择是否使能滤波器,配置LPT_CFG 寄存器
⑤根据需求是否使能外部触发中断位
⑥另外需要配置一组 LPTIM1_TRIGGER 引脚用于触发输入,这里以 PB13 为例
代码配置如下:
void LPTIM_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_GPIO_ClockCmd(GPIOB, ENABLE);
//set PB13 as LPTIM1 Trigger Pin
GPIO_PinAFConfig(GPIOB, GPIO_PinSource13, GPIO_AF_3);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_FLOATING;
GPIO_Init(GPIOB, &GPIO_InitStruct);
}
void LPTIM1_Init(u16 arr)
{
LPTIM_TimeBaseInit_TypeDef init_struct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_LPTIM1, ENABLE);
LPTIM_TimeBaseStructInit(&init_struct);
init_struct.ClockSource = LPTIM_PCLK_Source;
init_struct.CountMode = LPTIM_CONTINUOUS_COUNT_Mode;
init_struct.OutputMode = LPTIM_PULSE_TRIG_Mode;
init_struct.Waveform = LPTIM_AdjustPwmOutput_Mode;
init_struct.Polarity = LPTIM_Positive_Wave;
init_struct.ClockDivision = LPTIM_CLK_DIV1;
if(init_struct.ClockSource == LPTIM_LSE_Source) {
RCC_APB1PeriphClockCmd(RCC_APB1ENR_PWR | RCC_APB1ENR_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_LSEConfig(RCC_LSE_ON);
DELAY_Ms(5000);
while(!RCC_GetFlagStatus(RCC_FLAG_LSERDY));
LPTIM_CLKConfig(LPTIM1, LPTIM_LSE_Source);
}
else if(init_struct.ClockSource == LPTIM_LSI_Source) {
RCC_APB1PeriphClockCmd(RCC_APB1ENR_PWR | RCC_APB1ENR_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_LSICmd(ENABLE);
DELAY_Ms(500);
while(!RCC_GetFlagStatus(RCC_FLAG_LSIRDY));
LPTIM_CLKConfig(LPTIM1, LPTIM_LSI_Source);
}
else { //(init_struct.ClockSource == LPTIM_PCLK_Source)
LPTIM_CLKConfig(LPTIM1, LPTIM_PCLK_Source);
}
LPTIM_TimeBaseInit(LPTIM1, &init_struct);
LPTIM1->CFGR = LPTIM_ExInputUpEdge;
LPTIM1->CFGR = LPTIM_External_PIN_Trig;
}
6.4 1s 周期性唤醒 STOP模式
- |
- +1 赞 0
- 收藏
- 评论 0
本文由Goulart转载自灵动MM32MCU公众号,原文标题为:灵动微课堂 (第235讲) | MM32L013x——LPTIM的应用介绍,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

【经验】灵动微电子低功耗系列MM32L0130微控制器LPUART应用例程
LPUART相比标准的UART,其功耗极低,支持在低功耗模式下运行,并且可以将MCU从低功耗模式唤醒。本文介绍灵动微电子MM32全新低功耗系列MM32L0130的LPUART外设,实现基本UART收发通信、通过UART中断使MCU从低功耗模式中唤醒。以及LPUART的高级应用,实现DMA收发实验、使用数据匹配寄存器匹配到指定字符后唤醒MCU。

【经验】灵动微电子MM32F5270 MCU定时器单脉冲输出指南
定时器单脉冲输出是比较输出应用中的一种模式,所谓的单脉冲就是通过配置定时器使其在一个可控延时后,产生一个脉宽可控的脉冲。本文介绍灵动微电子MM32F5270定时器单脉冲输出指南。

【经验】灵动MindSDK应用基础——SPI模块样例详解
MindSDK为MM32主流的微控制器,实现了一系列SPI驱动的样例工程。本文通过讲解 SPI 模块的样例工程,介绍 SPI 模块的功能和用法。关于 SPI 模块对应的驱动程序,以及 SPI 外设模块硬件的实现细节,可具体查阅 MindSDK 工程的源文件,以及 MM32 微控制器(例如MM32F5270)的用户手册。

MindMotion(灵动微) MCU选型表
32位高性能,高性价比MCU,Core核心有M0、M0+、2XM0、M3、STAR-MC1,Flash存储容量范围 16KB~2048KB,RAM存储容量范围 2KB~128KB,工作电压:1.8~48V,CPU频率(MHz):48~180MHz,GPIO 端口数(个):6~86,LQFP/TSSOP/QFN等多种封装形式。
|
产品型号
|
品类
|
内核
|
管脚数(个)
|
工作温度(℃)
|
CPU频率(MHz)
|
工作电压(V)
|
GPIO 端口数(个)
|
Flash(KB)
|
SRAM (KB)
|
封装/外壳/尺寸
|
|
MM32F0163D7PV
|
32位MCU
|
M0
|
64
|
-40℃~105℃
|
96MHz
|
2.0~5.5V
|
57
|
128KB
|
16KB
|
LQFP64
|
选型表 - MindMotion 立即选型

MindMotion(灵动微)MM32系列32位MCU选型指南
目录- 公司介绍及产品应用领域 第二代M0产品 G系列产品 / 第二代M3产品 / 第二代M33产品 / 第二代电机专用MCU 第二代电机SOC产品 / AEC-Q100 / 第二代低功耗产品 第一代M0产品 第一代M3产品 / 第一代M33产品 / 第一代电机专用MCU / 第一代电机SOC产品 / 第一代低功耗产品
型号- MM32G0163D4PV,MM32L0XX,MM32F0144C6PM,MM32F5230,MM32SPIN580C,MM32G0020,MM32G0140,MM32L073PF,MM32F0133C4Q,MM32SPIN080GN,MM32SPIN560CM,MM32SPIN023C,MM32F0133C4P,MM32F5287L8PV,MM32SPIN533AM,MM32F0162D7P,MM32F0121C6P,MM32SPIN0230,MM32F0163D4Q,MM32SPIN080C,MM32F0141C1T,MM32L062NT,MM32F0020B1N,MM32F0144C1TV,MM32F5330,MM32G0001,MM32G0120,MM32F0144C1TM,MM32F0163D7P,MM32SPIN030CN,MM32G0121C1TV,MM32SPIN07PF,MM32F0010A1TV,MM32SPIN05PFOP,MM32SPIN0230B1TV,MM32SPIN37PSD,MM32G0001A6T,MM32F3270,MM32F0121C4P,MM32F5277E9PV,MM32F5287L9PV,MM32F0121C4Q,MM32F5333D6PV,MM32SPIN0280DAPV,MM32F0163D6P,MM32F0121C4N,MM32SPIN080G,MM32F0144C4PM,MM32SPIN560,MM32F0144C4PV,MM32F5280,MM32SPIN06NT,MM32F0140,MM32SPIN560C,MM32F0020,MM32G5333D6QV,MM32F0162D4Q,MM32F0273D6P,MM32F0050C1TV,MM32SPIN0230B3NV,MM32SPIN06PF,MM32G0144C4QV,MM32SPIN0280,MM32L052NT,MM32F5270,MM32F0144C4P,MM32F5277E8PV,MM32F031C6T6,MM32F0130,MM32F0010,MM32F0020B1TV,MM32F5333D7PV,MM32G0144C4PV,MM32SPIN080CN,MM32F0144C4Q,MM32SPIN060G,MM32L0136C7P,MM32F0133C7P,MM32SPIN05NW,MM32F5331D3NV,MM32SPIN05NT,MM32F0040B1T,MM32G0001A6T1V,MM32SPIN06PT,MM32F0120,MM32F0162D6P,MM32F5331D3NM,MM32F003NW,MM32G0160,MM32SPIN27NF,MM32F0163D4QM,MM32SPIN05PF,MM32F031,MM32F3273G6P,MM32F0163D4QV,MM32L0136B6P,MM32G0001A1TV,MM32F0133C6P,MM32SPIN0280D7PV,MM32F5277E7PV,MM32F0144C6P,MM32SPIN222C,MM32F0144C6PV,MM32F0010A6T,MM32G0001A1T,MM32F3273G7P,MM32L0130,MM32G0001A1N,MM32SPIN05PT,MM32G0121C4PV,MM32F0010A1T,MM32F5233D7PV,MM32SPIN27PF,MM32F0010A1N,MM32G5330,MM32SPINEBK,MM32SPIN07,MM32F3273G8P,MM32SPIN160C,MM32SPIN06,MM32SPIN0230B1NV,MM32L0136C6P,MM32SPIN05,MM32F0040B1N,MM32L0020,MM32F0050,MM32SPIN0280D6PV,MM32SPIN533,MM32F031K6U6,MM32F3273G9P,MM32F0163D6PM,MM32SPIN040C,MM32G0020B1T,MM32F003,MM32SPIN37,MM32F0163D6PV,MM32G0020B1N,MM32F0273D8P,MM32F0160,MM32L0136C3T,MM32F0040,MM32G0001A1NV,MM32SPIN0280D6QV,MM32F0144C1T,MM32F103CBT6,MM32F5233D6PV,MM32F0144C4QM,MM32F3273E6P,MM32SPIN27PQ,MM32SPIN27PS,MM32SPIN27PT,MM32L0136C4N,MM32SPIN27,MM32F0020B1NV,MM32F0270,MM32G0121C4QV,MM32F031F6U6,MM32F0273D7P,MM32F003TW,MM32G0144C1TV,MM32F3273E7P,MM32G0163D6PV,MM32F0163D7PM,MM32F0141B1T,MM32SPIN030C,MM32F0163D7PV,MM32F0131C7P,MM32F103,MM32SPIN05TW,MM32F031Y6Y6,MM32F0141C4P,MM32F0141C4Q,MM32F0141C4N,MM32F031K6T6,MM32F0010A1NV,MM32F0131C6P,MM32SPIN422C,MM32SPIN0280D4PV,MM32F0020B1T,MM32L0020B1T,MM32F103RBT6,MM32L0020B1N,MM32F031F6P6,MM32F0121C1N,MM32F0050C1NV,MM32F5333D4QM,MM32G0001A6TV,MM32SPIN360C,MM32,MM32F5333D4QV,MM32F0141C6P,MM32F0141B4P,MM32F0131C4P,MM32F0131C4Q,MM32SPIN0230B3TV,MM32SPIN533A,MM32SPIN033A,MM32F5287L7PV,MM32F5233D4QV

“MindMotion·Star“ Series: Major Member MM32F5260 Officially in Mass Production
At the Shenzhen Elexcon 2024 in late August, MindMotion Microelectronics officially unveiled the “MindMotion·Star” series of high-performance MM32 MCU products, featuring four sub-series: MM32F3, MindMotion Dubhe MM32F5, MindMotion Alioth MM32G5, and MindMotion Phecda MM32H5. MindMotion is excited to announce the formal launch of a key member of the MindMotion Dubhe sub-series: the MM32F5260.


The High-performance MCU MM32F52 Series featuring the Arm China “STAR-MC1” Processor Is Available for Order
The MM32F52 series is MindMotion announced the first family of high-performance MCUs featuring the Arm China “STAR-MC1” processor, which is based on the Arm-v8 architecture and offers approximately 20% higher performance per unit compared to Cortex-M3 and Cortex-M4.

【IC】“灵动·星”系列MM32高性能MCU产品搭载Star-MC1提供强劲内核动力,性能提升20%
“灵动·星”系列 MM32 高性能 MCU 产品,搭载安谋科技(Arm China)Star-MC1 内核性能,其1.5 DMIPS / MHz,提升 20% ,4.02 CoreMark / MHz,提升20% 。目前包含 4 个子系列: MM32F3,灵动·天枢 MM32F5,灵动·玉衡 MM32G5,灵动·天玑 MM32H5,为用户提供灵活、丰富的选择。

基于ARM®Cortex®-M0的32位微控制器MM32F0010数据手册
描述- 本资料为MM32F0010 32位微控制器数据手册,介绍了该产品的核心特性、功能描述、规格参数、引脚定义、电气特性、封装特性和命名规则等内容。该产品基于Arm® Cortex®-M0内核,最高工作频率可达48MHz,内置高速存储器、丰富的增强型I/O端口和外设接口,适用于多种应用场景。
型号- MM32F0010A1TV,MM32F0010A6TV,MM32F0010,MM32 MODEL,MM32F0010A1NV,MM32F0010A1T,MM32,MM32F0010A6T,MM32F0010A1N

重磅|灵动微电子凭借电机控制方面的卓越表现荣获TCL实业认可!携手共建联合实验室
MindMotion灵动微电子自2021年与TCL实业接洽以来,充分展现了自身产品在电机控制方面的卓越表现,获得了TCL实业的青睐。期间,灵动不断强化在芯片设计方面的自主创新能力,以适应在竞争激烈的社会环境下,满足多变的市场需求。并以其快速高效的响应获得了TCL实业的高度认可!未来灵动也将不断突破创新,永攀高峰。

【IC】灵动微电子发布灵动·天枢子系列新成员:MM32F5260,搭载国产Star-MC1内核,内核动力强劲
在8月底的深圳嵌入式电子展上,灵动微电子正式发布了“灵动星”系列MM32高性能MCU产品,包含4个子系列:MM32F3,灵动·天枢 MM32F5,灵动·玉衡MM32G5,灵动·天玑MM32H5。9月30日灵动微电子正式发布灵动·天枢子系列的重磅成员:MM32F5260。

基于灵动MM32F0130微控制器的智能插排方案,实现远程开关控制、定时开关、随时了解家电设备的使用状况
智能插座又可以称为WIFI插座,在普通插座的功能基础上延伸了许多功能,如防雷击,防短路,防过载,防漏电,配合智能手机的APP应用,可以实现远程开关控制、定时开关、随时了解家电设备的使用状况。基于灵动MM32F0130微控制器的插排,具有以下特点:-内置Timer进行解码红外输入-通过串口与云端连接,进行远程控制,以及电量监控等-通过I2C与计量芯片通讯,进行异常检测,过流,过/欠压等保护

灵动微电子扎根张江造“芯”,打造本土32位MCU知名品牌
灵动微电子成立于2011年,2016年进军MCU市场,2019年积极向工业、大家电、汽车等领域发力,目前已涵盖消费电子、电机与电源、家电、汽车、计算机与通信、工业控制等应用领域,客户群体包括飞利浦、小米、汇川、海尔、海信、美的等,是中国本土领先的通用32位MCU 产品及解决方案供应商。

The “MindMotion·Star” Series MM32 High-performance MCU Products Based on the Arm China Star-MC1 Core
The “MindMotion·Star” series MM32 high-performance MCU products, equipped with the Arm China Star-MC1 core, deliver 1.5 DMIPS / MHz and a 20% improvement, with 4.02 CoreMark / MHz, also showing a 20% enhancement. The series currently includes four sub-series: MM32F3, MindMotion·Dubhe MM32F5 MindMotion·Alioth MM32G5, and MindMotion·Phecda MM32H5, offering users a flexible and diverse range of options.

电子商城

现货市场
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论