【经验】解决车载SoC R-Car V3M通过MIPI CSI接入摄像头采集不到数据的问题

RENESAS车载SoC R-Car V3M通过MIPI CSI接入摄像头时,同样的驱动程序,并且都可以正常生成/dev/video0设备,有些摄像头可以正常采集到图像,而有些会出现mipi csi报错,采集不到数据,本文解决此类问题,并说明原因。
首先linux系统启动后,正常生成/dev/video0设备,说明mipi csi等资源都获取到并识别到前端的摄像头,而且在 R-Car V3M的eagle板上也是mipi csi的接口,验证过摄像头都是OK的,并且在新设计的板子上也接入其他摄像头都是可以正常采集图像数据。
通过V4L2采集不到数据,在MIPI CSI中会出现如下打印:
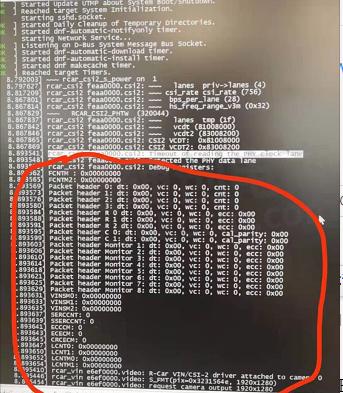
而之前正常的摄像头就不会有这些异常打印,通过与摄像头厂商确认,正常的摄像头的MIPI CSI CLK LANE属于非连续时钟,而异常的摄像头属于连续的时钟模式,他们的区别在于:

所以我们有2种方法来测试这个问题:
1、可以让前端摄像头先不输出mipi csi信号,SOC端口先打开mipi csi,也就是先运行应用程序打开/dev/video0设备并去采集凸显,然后加载摄像头端驱动,这里是解串器的驱动,使解串器输出MIPI CSI的时钟和数据,这样就能采集到图像;
2、修改摄像头端,使它成为非连续模式也是可以的。
本文这种MIPI CSI采集不到图像的问题也是属于经常会出现的一类问题,对于调试MIPI CSI较少的研发来说,往往找不到头绪,参考本文就可以很快解决此类问题。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由Bill提供,版权归世强硬创平台所有,非经授权,任何媒体、网站或个人不得转载,授权转载时须注明“来源:世强硬创平台”。
相关推荐

【经验】R-Car H3/H3N/M3 SoC芯片的AVS模块介绍及寄存器的配置
Renesas推出驾驶安全辅助系统和车载信息娱乐系统的第三代R-Car SoC芯片,内核方面使用的是Cortex-A57 CPU、Cortex-A53 CPU和Cortex-R7,主要面向无人驾驶、智能辅助驾驶、车机、仪表和ADAS等应用场景,并以其强大的算力和丰富的外设资源赢得了广大车厂和Tier 1的认可。本文将介绍瑞萨R-Car H3/H3N/M3的AVS模块介绍及寄存器的配置。

【经验】如何优化AD/ADAS的SoC AI性能?
在开发面向车载AI设备的SoC时,确认搭载的加速器能否在实际顾客产品中所需的DNN中提供足够的性能,并且功耗是否在可接受范围内,已成为迫切的问题。瑞萨(RENESAS)将利用PPA Estimator的高度精确性能寻找最佳配置以开发高性能、低功耗的车载AI加速器。

Optimization of AI Performance of SoCs for AD/ADAS
Renesas has started applying PPA Estimator to the development of some SoCs for AD/ADAS with accelerators for AI processing from 2023 and plans to expand the scope of application gradually.

【应用】车规级高可靠性CAN网络芯片TPT1145Q用于车载CMS,兼容CAN网络,拥有故障诊断、高温工作等能力
在车载CMS中,由于有SoC处理摄像头视频信息,另外也需要与外界的域控进行交互,而汽车信息交互最多的是CAN网络,这里分享一款在国内某CMS设计客户,评估CMS产品上满足性能要求的思瑞浦CAN网络芯片TPT1145Q。

罗姆与芯驰科技缔结车载领域的解决方案开发合作伙伴关系,共同推动汽车技术创新性发展
领先的车规芯片企业芯驰科技与ROHM缔结了车载领域的先进技术开发合作伙伴关系。此次,作为首批合作成果,芯驰科技智能座舱SoC X9系列的参考板上搭载了罗姆的SerDes IC和PMIC等产品,现已开始为客户提供解决方案。
【产品】瑞萨新一代SOC R-Car V3H,专为自动驾驶前置摄像头应用
瑞萨开发了专门针对前置摄像头应用的SoC——R-Car V3H,集成了专门针对图像处理的功能单元,它比R-Car V3M在视觉处理方面的性能提高了5倍,并只有0.3瓦的超低功耗,更好的适应自动驾驶的需求。


【选型】车联网V2X车载端产品(V-BOX)推荐:车规级SoC RCAR M3,7核主频1.8ghz、运力30DMIPS
3GPP给出了相关的应用场景,车联网(V2X)分:V2N/V2I/V2P/V2V这几种应用。那么在硬件设计上,现阶段主要是V2X的车载OBU产品和路测的RSU产品。笔者当下接到的项目则是整合传统T-BOX的OBU产品:V-BOX。整个系统功能融合了TBOX和V2I/V2N/V2V的功能。可以使用瑞萨RCAR M2 SoC,内部集成2核A57和4核A53,还有实时内部R7。

【经验】瑞萨R-Car V3M的eagle摄像头适配过程
R-Car V3M的eagle板自带4路摄像头输入解串器max9286,前端可以接入美信的max96705,max9271等串行器,从而实现R CAR V3M平台的4路摄像头的输入,本文记录了接入美信的max96705+OV490(isp)+OV9284(sensor)摄像头的过程。

【经验】R-Car V3M/H接入2片AVT的RX芯片NS2521实现4路摄像头360环视探索的方法
Renesas的R-Car V3M、R-Car V3H的摄像头并口接入瑞发科的AVT接收芯片,实现4路摄像头的图像接入,从而来实现360度环视拼接功能,那么具体是如何对接的呢?本文详细讲解2颗AVT的RX芯片NS2521接入R-Car V3M/H的原理以及具体方法。

【经验】R-Car H3 bsp如何实现PCIE endpoint模式?
R-Car系列的大多数型号都集成了PCIE2.0接口的,该接口可以支持root port和endpoint也就是主从两种模式的,最近有用户在使用两颗R-Car H3做PCIE通讯测试时发现无法配置成endpoint模式,经过测试及追查源代码发现,bsp中PCIE驱动没有对endpoint模式做支持,因此需要自行修改相应的驱动代码。

【经验】解析瑞萨R CAR V3M DDR3 DQ眼图测试实操以及注意点
瑞萨R CAR V3M开发产品功能完成后,一般需做DDR稳定性,信号质量的测试,对一些大客户可通过DDR供应商的示波器来测试DDR信号质量,而另外瑞萨提供一个眼图测试固件,可以大概看一下读写DDR时的DQ眼图质量。本文将对其DQ眼图测试实操以及注意点进行介绍。

【应用】瑞萨多路接口的车规级高算力SOC V3H2系列用于车载CMS,支持60fps视频帧率
在车载CMS中,需要一颗高算力SOC处理视频信息,本文介绍利用RENESAS推出的V3H2系列R8A77980ALA05BA进行CMS设计。该SOC支持60fps视频帧率,提供多路接口,完全过车规认证,拓展性好,搭配瑞萨系列PMIC使用,稳定性更高。

【选型】车载360全景影像头主控SOC推荐:瑞萨 RCAR V3M,主频800Mhz,支持4通道MIPS视频接口
车载360全景摄像头主控中,推荐瑞萨电子的RCAR V3M R8A77970LA01BA,该产品采用两个A53内核,主频达到800MHz,内部视频处理单元数据接口上支持4通道的MIPI-CSI2接口,可以满足4个摄像头的输入,输出支持1路的LVDS接口输出,这样可以驱动一个屏幕显示360的图像信息。芯片满足车规要求,具有比较高的性价比。

现货市场

服务
可定制变压器电压最高4.5KV,高频30MHz;支持平面变压器、平板变压器、OBC变压器、DCDC变压器、PLC信号变压器、3D电源、电流变压器、反激变压器、直流直流变压器、车载充电器变压器、门极驱动变压器等产品定制。
最小起订量: 100000 提交需求>
提供辐射发射测试、传导发射预测试、EMI噪声频率扫描服务。消费电子辐射发射预测试频率范围30MHz-1GHz、 车载电子9KHz-3GHz,并针对问题给出EMC整改方案。支持到场/视频直播测试,资深专家全程指导。
实验室地址: 深圳 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论