【经验】灵动微电子低功耗系列MM32L0130微控制器LPUART应用例程


LPUART(Low power universal asynchronous receiver transmitter,低功耗通用异步收发器),相比标准的UART,其功耗极低,支持在低功耗模式下运行,并且可以将MCU从低功耗模式唤醒。
本文介绍灵动微电子MM32全新低功耗系列MM32L0130的LPUART外设,实现基本UART收发通信、通过UART中断使MCU从低功耗模式中唤醒。以及LPUART的高级应用,实现DMA收发实验、使用数据匹配寄存器匹配到指定字符后唤醒MCU。
1、LPUART 简介
1.1 LPUART功能框图
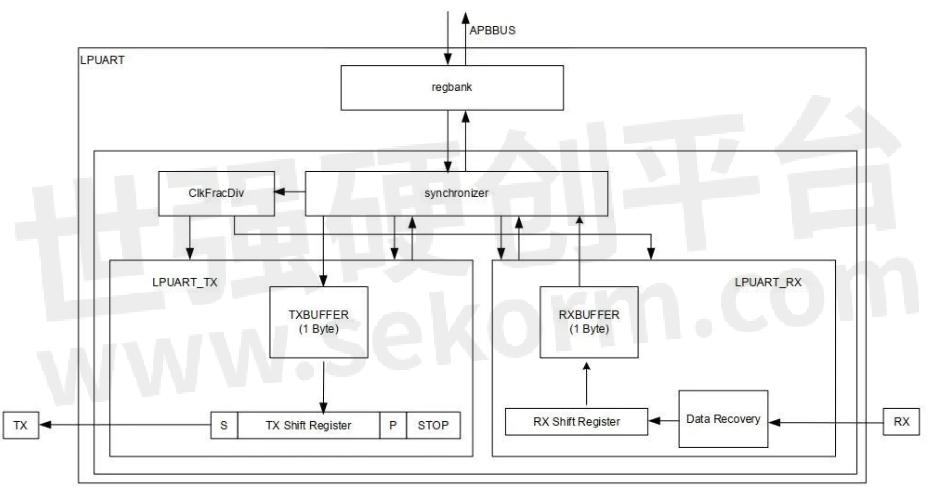
1.2 LPUART功能特征
支持UART帧格式的全双工异步数据收发。
支持输入任意频率的时钟源,可配置为LSE/LSI/PCLK。
支持可编程的波特率数据传输,发送和接收时可采用3、4分频交替,防止累计误差。
可配置奇偶校验位、停止位。
可配置收发数据信号取反。
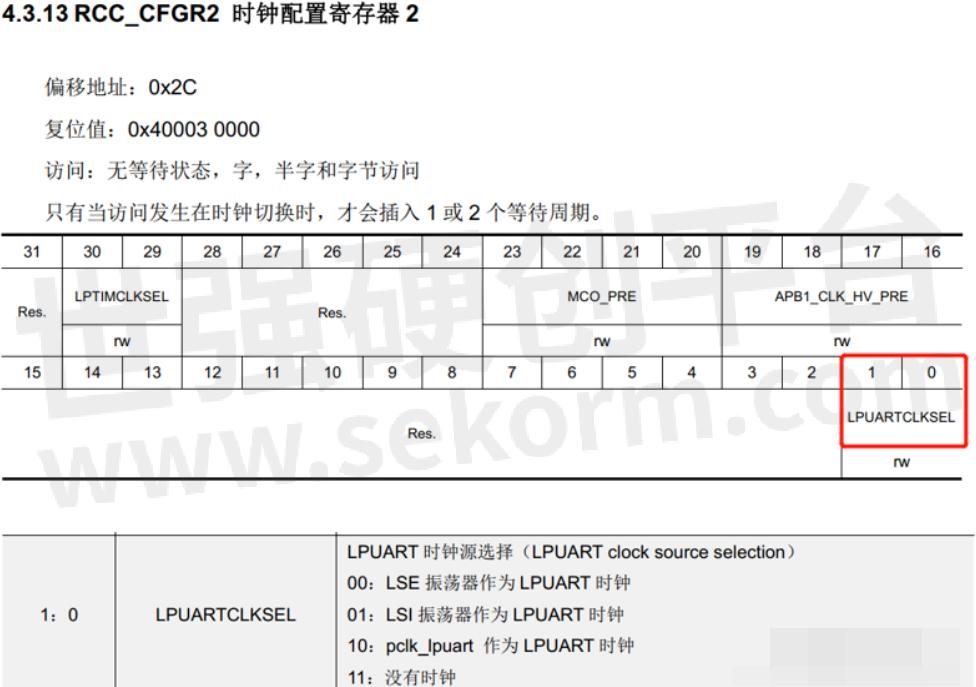
2、LPUART时钟配置
LPUART时钟源配置寄存器在RCC_CFGR2中的位0和位1,可配置LSE、LSI、PCLK作为时钟源。
3、LPUART中断与唤醒
支持的中断源:
接收缓冲溢出
帧错误
奇偶校验错误
接收器检测到起始位
接收器检测到下降沿
接收器完整接收 1byte 数据
接收器完整接收数据且与预设数据匹配
发送器数据完成发送
发送器缓冲空
支持低功耗模式下的唤醒源:
接收器检测到下降沿唤醒
接收器检测到起始位唤醒
接收器1字节接收完成唤醒
接收器1字节数据接收并匹配唤醒
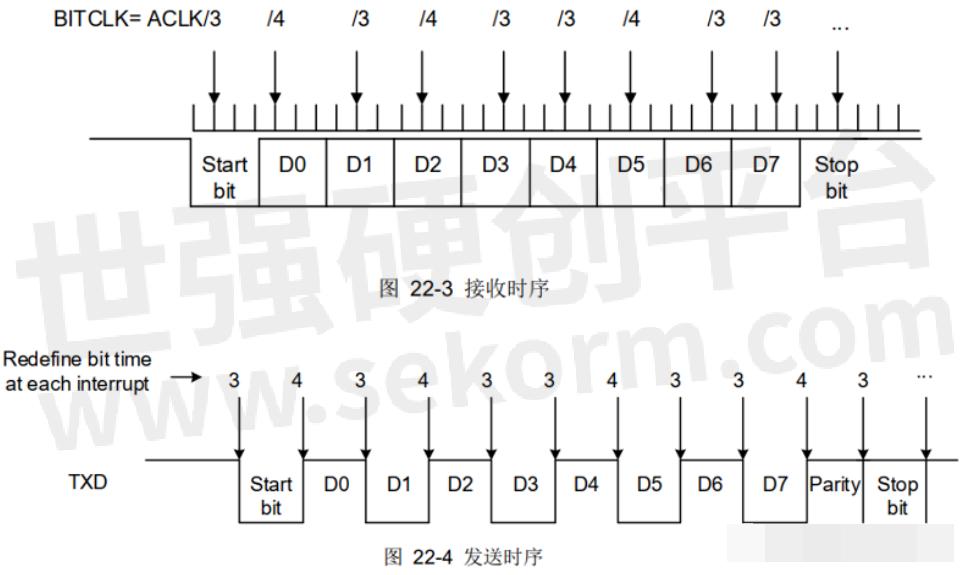
4、接收和发送时序
由于LPUART工作时钟不是波特率的整数倍,采用固定分频系数的话会引入累计误差,所以在接收和发送的时候采用3、4分频交替进行接收和发送,每个bit采样一次,每个bit采用3分频还是4分频由MCTL寄存器控制,接收和发送时序图如下:
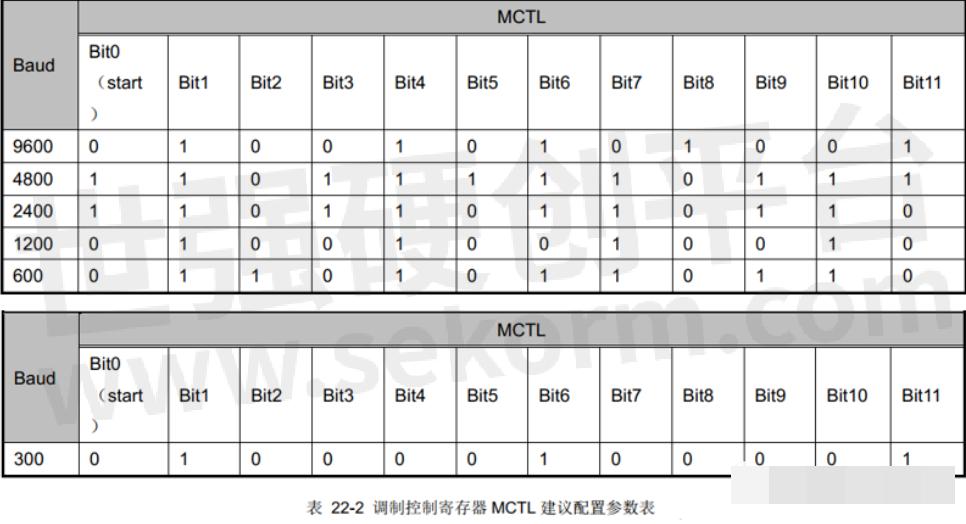
当LPUART工作时钟配置为标准的32.768KHz时,软件可配置BREN为0,然后根据通信波特率调整调制寄存器MCTL,建议配置参数如下表:
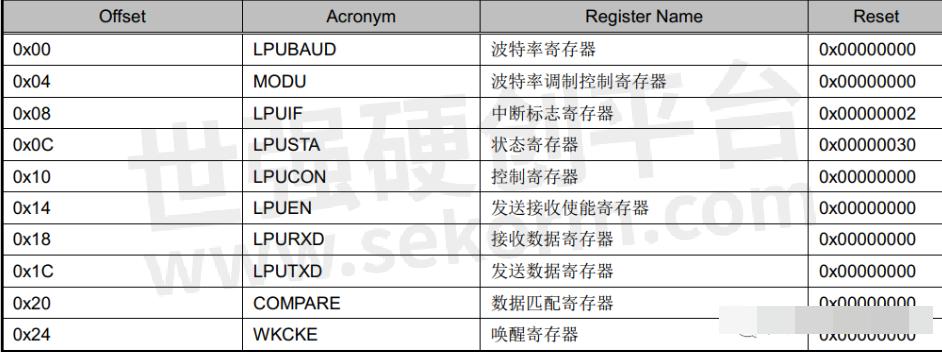
5、LPUART寄存器概览
6、LPUART实现普通UART功能配置步骤
1、开启LPUART所选时钟源
2、配置RCC_CFGR2寄存器选择LPUART时钟
3、配置 LPUBAUD 寄存器决定波特率
4、根据波特率选择合适的调制参数,配置 MCTL 寄存器
5、配置 LPUCON 寄存器,选择帧格式、极性、中断参数等
6、配置 LPUEN 寄存器打开发送、接收使能
7、发送和接收数据
发送数据:
将待发送的数据写入LPUTXD,当发送完成时,LPUSTA的TXE标志位会被硬件置起,表示数据已传入移位寄存器,发送 buffer为空。此时可往LPUTXD写入下一个数据。软件向发送buffer写数据时TXE标志位自动清零。
接收数据:
当接收一个完整帧时,LPUSTA的RXF标志位置起,表示已完整接收数据,此时软件可读取LPURXD读出接收到的数据。软件读LPUDATA寄存器时,RXF标志位自动清零。
8、LPUART功能实现代码
首先编写基础UART的代码,通过轮询的方式发送和接收数据。然后添加中断代码,实现通过LPUART将MCU从低功耗模式唤醒。
8.1 基于LSE时钟的基础UART功能实现代码
a.开启BKP、LSE时钟,待LSE时钟稳定,使能LPUART时钟:
RCC_APB1PeriphClockCmd(RCC_APB1ENR_BKP, ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_LSEConfig(RCC_LSE_ON);
DELAY_Ms(100);
while(RCC_GetFlagStatus(RCC_FLAG_LSERDY) == RESET) {;}
RCC_APB2PeriphClockCmd(RCC_APB2ENR_LPUART1, ENABLE);
b.配置LPUART的LPUART_InitTypeDef结构体参数:
LPUART_InitTypeDef init_struct;
init_struct.LPUART_Clock_Source = 0; //时钟源选择
init_struct.LPUART_BaudRate = LPUART_Baudrate_9600; //波特率选择9600
init_struct.LPUART_WordLength = LPUART_WordLength_8b; //8位数据位
init_struct.LPUART_StopBits = LPUART_StopBits_1; //1位停止位
init_struct.LPUART_Parity = LPUART_Parity_No; //没有校验位
init_struct.LPUART_MDU_Value = 0x952; //波特率调制控制寄存器
init_struct.LPUART_NEDET_Source = LPUART_NegativeDectect_Source2;//下降沿采样使能
init_struct.LPUART_RecvEventCfg = LPUART_RecvEvent_Start_Bit;//中断检测模式
LPUART_Init(LPUART1, &init_struct);
LPUART_Cmd(LPUART1, ENABLE);
c.设置LPUART引脚复用,例程复用到PA4、PA5:
GPIO_InitTypeDef GPIO_InitStruct;
RCC_GPIO_ClockCmd(GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource4, GPIO_AF_3);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource5, GPIO_AF_3);
//LPUART1_TX GPIOA.4
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct);
//LPUART1_RX GPIOA.5
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOA, &GPIO_InitStruct);
d.编写发送函数:
void Output_Byte(LPUART_TypeDef* lpuart, uint8_t dat)
{
LPUART_SendData(lpuart, dat);
while(!LPUART_GetFlagStatus(lpuart, LPUART_LPUSTA_TXE));
}
e.编写轮询接收函数:
uint8_t Input_Byte(LPUART_TypeDef* lpuart)
{
uint8_t temp;
while(1) {
if(LPUART_GetFlagStatus(lpuart, LPUART_LPUSTA_RXF)) {
//read LPUART_LPUSTA_RXF bit and clear
temp = (uint8_t)LPUART_ReceiveData(lpuart);
break;
}
}
if(temp == 0xd) {
return 0;
}
return temp;
}
f.
编写实验样例:
void LPUART_TxRx_Test(void)
{
uint8_t temp, i;
char string[] = "LPUART polling test!\r\n";
for(i = 0; i < strlen(string); i++)
{
Output_Byte(LPUART1, string[i]);
}
while(1)
{
temp = Input_Byte(LPUART1);
if(temp != 0)
{
Output_Byte(LPUART1, temp);
}
}
}
g.在main函数中配置好LPUART后,调用LPUART_TxRx_Test函数,可得到如下实验结果:

8.2 在上述基本LPUART配置的基础上增加中断配置代码,实现唤醒低功耗模式中的MCU
a.开启SYSCFG、PWR时钟:
RCC_APB2PeriphClockCmd(RCC_APB2ENR_SYSCFG, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1ENR_PWR, ENABLE);
b.EXTI模块可以产生中断请求,用来唤醒低功耗模式中的MCU,LPUART连接到EXTI22,使能EXTI22:
EXTI_InitTypeDef EXTI_InitStruct;
EXTI_StructInit(&EXTI_InitStruct);
EXTI_InitStruct.EXTI_Line = EXTI_Line22;
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Rising;
EXTI_InitStruct.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStruct);
c.配置NVIC:
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = LPUART1_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPriority = 1;
NVIC_Init( &NVIC_InitStruct);
d.清除接收标志并打开接收中断:
LPUART_ClearITPendingBit(LPUART1, LPUART_LPUIF_RXIF);
LPUART_ITConfig(LPUART1, LPUART_LPUCON_RXIE, ENABLE);
e.定义RX缓存,然后编写中断服务函数:
char rxDataBuf[10], cnt = 0;
uint8_t cnt_flag = 0;
void LPUART1_IRQHandler()
{
if(LPUART_GetFlagStatus(LPUART1, LPUART_LPUSTA_START))
{
LPUART_ClearFlagStatus(LPUART1, LPUART_LPUSTA_START);
}
if(LPUART_GetITStatus(LPUART1, LPUART_LPUIF_RXIF) == SET)
{
LPUART_ClearITPendingBit(LPUART1, LPUART_LPUIF_RXIF);
rxDataBuf[cnt] = LPUART_ReceiveData(LPUART1);
if(++cnt >= 10)
{
cnt_flag = 1;
cnt = 0;
}
}
}
f.编写实验样例:
void LPUART_Wakeup_Test(void)
{
uint8_t temp, i;
char string1[] = "LPUART wakeup mcu test!\r\n";
char string2[] = "mcu stop!\r\n";
char string3[] = "mcu wakeup!\r\n";
for(i = 0; i < strlen(string1); i++)
{
Output_Byte(LPUART1, string1[i]);
}
DELAY_Ms(20);
for(i = 0; i < strlen(string2); i++)
{
Output_Byte(LPUART1, string2[i]);
}
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFI);//休眠
for(i = 0; i < strlen(string3); i++)
{
Output_Byte(LPUART1, string3[i]);
}
while(1)
{
}
}
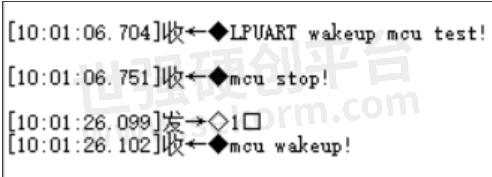
g.在main函数中配置好LPUART后,调用实验函数LPUART_Wakeup_Test,可以的到如下结果:
9、LPUART使用DMA
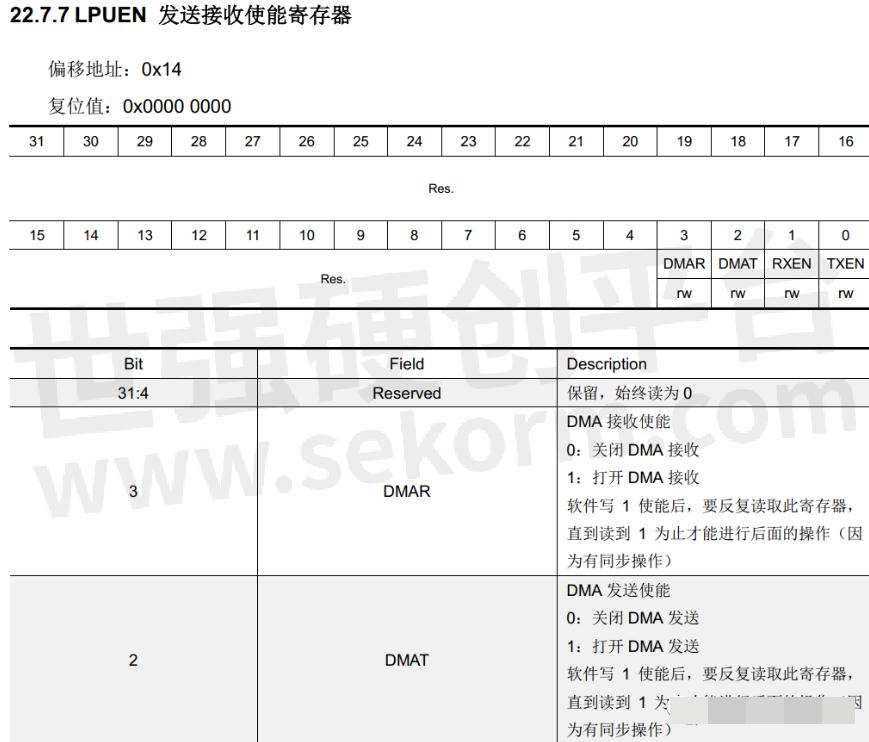
LPUART可以使用DMA来搬运数据,实现无需CPU参与的快速自动数据传输。硬件发出DMA请求与对应的DMA通道直连,也可以通过软件配置寄存器的方式触发DMA通道请求。LPUART的控制寄存器有对应的DMA使能位,如下图所示:
9.1 DMA中断
DMA的每个通道都有三种中断事件标志:DMA半传输、DMA传输完成和DMA传输出错。各通道单独的中断请求由这3种事件标志逻辑或起来。可以配置寄存器的对应位来使能这些中断:

9.2 LPUART使用DMA的配置步骤
1、根据基本UART配置步骤配置LPUART
2、使能LPUEN的DMAR与DMAT位激活DMA模式
3、使能DMA时钟
4、发送需要配置DMA的源地址(存储器地址)和目的地址(LPUTXD),传输的数据量以及DMA通道
5、配置完发送后,只要TXFIFO为空,就会请求DMA发送
6、接收需要配置DMA的源地址(LPURXD)和目的地址(存储器地址),传输的数据量以及DMA通道
7、配置完接收后,只要RXFIFO有数据,即不为空,就会请求DMA接收
9.3 功能代码实现
下面例程实现了使用DMA发送和接收LPUART数据,发送和接收完成后进入中断,例程在基本UART收发实验的基础上完成。
a.申请例程所用到的TX和RX缓存、TX和RX完成标志:
uint8_t TX_Buffer[16], RX_Buffer[16];
uint8_t TX_Complete = 0, RX_Complete = 0;
b.配置NVIC:
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = DMA1_Channel2_3_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPriority = 2;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
c.配置DMA通道2为LPUART_TX:
void LPUART_DMA_TX_Init(void)
{
DMA_InitTypeDef DMA_InitStruct;
RCC_DMA_ClockCmd(DMA1, ENABLE);
DMA_DeInit(DMA1_Channel2);
DMA_StructInit(&DMA_InitStruct);
//DMA transfer peripheral address
DMA_InitStruct.DMA_PeripheralBaseAddr = (uint32_t)&LPUART1->LPUTXD;
//DMA transfer memory address
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)TX_Buffer;
//DMA transfer direction from peripheral to memory
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralDST;
//DMA cache size
DMA_InitStruct.DMA_BufferSize = 16;
//The peripheral address is forbidden to move backward
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
//The memory address is shifted backward
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
//Define the peripheral data width to 8 bits
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStruct.DMA_Mode = DMA_Mode_Normal;
DMA_InitStruct.DMA_Priority = DMA_Priority_Medium;
//M2M mode is disabled
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_InitStruct.DMA_Auto_reload = DMA_Auto_Reload_Disable;
DMA_Init(DMA1_Channel2, &DMA_InitStruct);
DMA_SetChannelMuxSource(DMA1_Channel2, DMA1_MUX_LPUART1_TX);
//Enable LPUART_DMA1_Channel Transfer complete interrupt
DMA_ITConfig(DMA1_Channel2, DMA_IT_TC, ENABLE);
LPUART_TX_DMACmd(LPUART1, ENABLE);
while((LPUART1->LPUEN & LPUART_LPUEN_DMAT) == 0);
//LPUART_DMA1_Channel enable
DMA_Cmd(DMA1_Channel2, ENABLE);
}
d.配置DMA通道3为LPUART_RX:
void LPUART_DMA_RX_Init(void)
{
DMA_InitTypeDef DMA_InitStruct;
RCC_DMA_ClockCmd(DMA1, ENABLE);
DMA_DeInit(DMA1_Channel3);
DMA_StructInit(&DMA_InitStruct);
//DMA transfer peripheral address
DMA_InitStruct.DMA_PeripheralBaseAddr = (uint32_t)&LPUART1->LPURXD;
//DMA transfer memory address
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)RX_Buffer;
//DMA transfer direction from peripheral to memory
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralSRC;
//DMA cache size
DMA_InitStruct.DMA_BufferSize = 16;
//The peripheral address is forbidden to move backward
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
//The memory address is shifted backward
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
//Define the peripheral data width to 8 bits
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStruct.DMA_Mode = DMA_Mode_Normal;
DMA_InitStruct.DMA_Priority = DMA_Priority_Medium;
//M2M mode is disabled
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_InitStruct.DMA_Auto_reload = DMA_Auto_Reload_Disable;
DMA_Init(DMA1_Channel3, &DMA_InitStruct);
DMA_SetChannelMuxSource(DMA1_Channel3, DMA1_MUX_LPUART1_RX);
//Enable LPUART_DMA1_Channel Transfer complete interrupt
DMA_ITConfig(DMA1_Channel3, DMA_IT_TC, ENABLE);
LPUART_RX_DMACmd(LPUART1, ENABLE);
while((LPUART1->LPUEN & LPUART_LPUEN_DMAR) == 0);
//LPUART_DMA1_Channel enable
DMA_Cmd(DMA1_Channel3, ENABLE);
}
e.编写中断服务函数:
void DMA1_Channel2_3_IRQHandler(void)
{
if(DMA_GetITStatus(DMA1_IT_TC2))
{
DMA_ClearITPendingBit(DMA1_IT_TC2);
TX_Complete = 1;
}
if(DMA_GetITStatus(DMA1_IT_TC3))
{
DMA_ClearITPendingBit(DMA1_IT_TC3);
RX_Complete = 1;
}
}
f.编写实验样例:
void LPUART_RxTx_DMA_Test(void)
{
uint8_t i;
for(i = 0; i < 16; i++)
{
TX_Buffer[i] = i;
}
LPUART_DMA_TX_Init();
LPUART_DMA_RX_Init();
while(1)
{
if(TX_Complete == 1)
{
TX_Complete = 0;
DMA1_Channel3->CMAR = (uint32_t)RX_Buffer;
DMA1_Channel3->CNDTR = 16;
DMA_Cmd(DMA1_Channel3, ENABLE);
}
if(RX_Complete == 1)
{
RX_Complete = 0;
memcpy((void *)TX_Buffer, (void *)RX_Buffer, 16);
DMA1_Channel2->CMAR = (uint32_t)TX_Buffer;
DMA1_Channel2->CNDTR = 16;
DMA_Cmd(DMA1_Channel2, ENABLE);
}
}
}
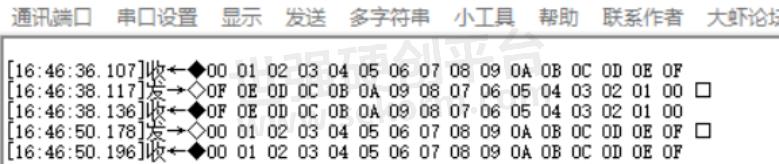
g.在main函数中配置好LPUART和DMA后,调用实验函数LPUART_RxTx_DMA_Test,可以得到如下结果:
10、使用数据匹配寄存器匹配到指定字符后唤醒MCU
为进一步降低系统功耗,MM32L0130系列的LPUART提供了一种接收到指定字符才能唤醒低功耗状态的MCU的功能。用于唤醒的指定字符,由数据匹配寄存器确定:
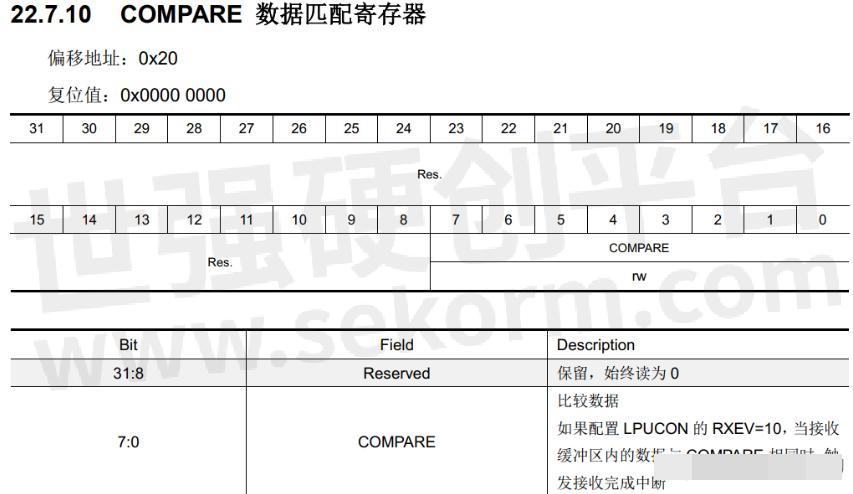
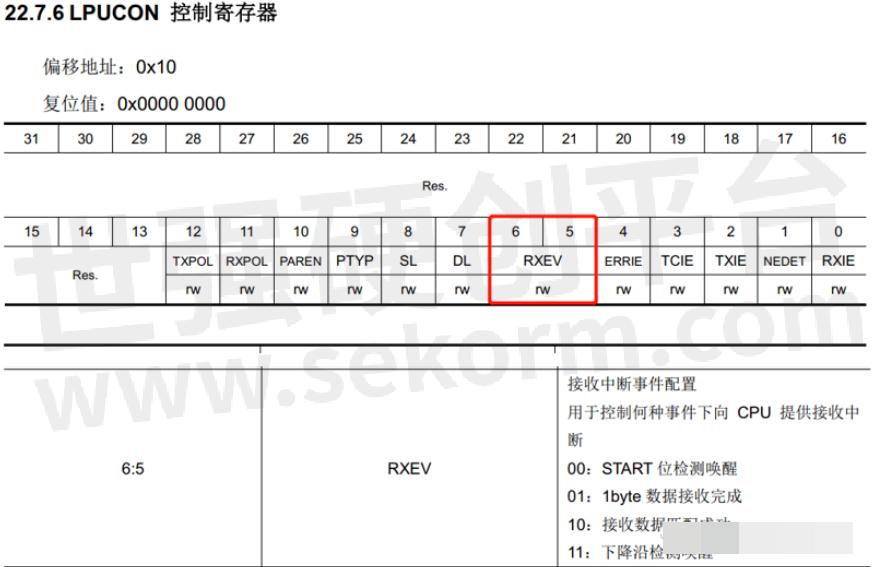
10.1 接收中断配置寄存器
可以通过LPUART的LPUCON.RXEV寄存器配置唤醒事件为START位、一帧接收完成、一帧数据匹配或者RXD下降沿唤醒。
10.2 功能代码实现
匹配指定字符唤醒MCU功能,需要在上期讲解的LPUART唤醒低功耗模式中的MCU基础上修改中断事件配置、指定唤醒字符,具体代码如下:
a.配置LPUART接收中断事件为接收数据匹配成功:
LPUART_InitTypeDef init_struct;
init_struct.LPUART_Clock_Source = 0;
init_struct.LPUART_BaudRate = LPUART_Baudrate_9600;
init_struct.LPUART_WordLength = LPUART_WordLength_8b;
init_struct.LPUART_StopBits = LPUART_StopBits_1;
init_struct.LPUART_Parity = LPUART_Parity_No;
init_struct.LPUART_MDU_Value = 0x952;
init_struct.LPUART_NEDET_Source = LPUART_NegativeDectect_Source2;
init_struct.LPUART_RecvEventCfg = LPUART_RecvEvent_RecvData_Mactched;
LPUART_Init(LPUART1, &init_struct);
b.配置特定的唤醒字符:
LPUART_SetMatchData(LPUART1, ‘5’); //指定字符’5’为唤醒字符
c.编写中断服务程序,判断接收匹配事件并清除标志:
void LPUART1_IRQHandler()
{
if(LPUART_GetFlagStatus(LPUART1, LPUART_LPUSTA_START))
{
LPUART_ClearFlagStatus(LPUART1, LPUART_LPUSTA_START);
}
if(LPUART_GetFlagStatus(LPUART1, LPUART_LPUSTA_MATCH))
{//判断接收中断匹配事件
LPUART_ClearFlagStatus(LPUART1, LPUART_LPUSTA_MATCH);
}
if(LPUART_GetITStatus(LPUART1, LPUART_LPUIF_RXIF) == SET) {
LPUART_ClearITPendingBit(LPUART1, LPUART_LPUIF_RXIF);
rxDataBuf[cnt] = LPUART_ReceiveData(LPUART1);
if(++cnt >= 10)
cnt_flag = 1;
}
EXTI_ClearITPendingBit(EXTI_Line22);
}
d.编写试验样例:
void LPUART_Wakeup_Test(void)
{
uint8_t temp, i;
char string1[] = "LPUART wakeup mcu test!\r\n";
char string2[] = "mcu stop!\r\n";
char string3[] = "mcu wakeup!\r\n";
for(i = 0; i < strlen(string1); i++)
{
Output_Byte(LPUART1, string1[i]);
}
DELAY_Ms(20);
for(i = 0; i < strlen(string2); i++)
{
Output_Byte(LPUART1, string2[i]);
}
PWR_EnterSTOPMode(PWR_Regulator_LowPower, PWR_STOPEntry_WFI);//休眠
for(i = 0; i < strlen(string3); i++)
{
Output_Byte(LPUART1, string3[i]);
}
while(1)
{
}
}
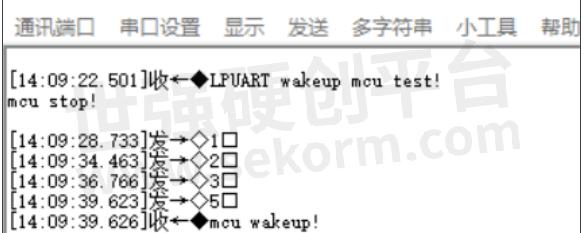
e.在main函数配置好LPUART后,调用实验函数LPUART_Wakeup_Test,可以得到如下结果:
- |
- +1 赞 0
- 收藏
- 评论 0
本文由ll转载自灵动MM32MCU公众号,原文标题为:灵动微课堂 (第237讲)|基于MM32L0130的LPUART应用(1 2),本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

灵动微电子MM32F0160系列MCU FlexCAN-FD通信应用指南
MM32F0160系列MCU具有一个 FlexCAN 模块,该模块遵循 ISO 11898-1 标准、 CAN FD 和 CAN 2.0B 协议规范,不仅兼容传统CAN,还支持CAN FD模式。本章节初步学习使用MM32F0160 FlexCAN-FD接口实现CAN FD通信,相关例程参考灵动官网的LibSamples或在此基础上修改。

使用灵动MM32F5270 MCU UART配置实现LIN通信
本文主要简述MM32F5270 UART是如何实现LIN通信的。从LIN驱动程序、 主机程序、从机程序和验证等方面来讲代码实现。

【经验】灵动MindSDK搭建Keil MDK开发环境指南
本文介绍基于Windows操作系统构建嵌入式系统开发环境过程中需要使用的主要软件Keil MDK,并对一些需要特别关注的要点重点说明。Keil MDK是灵动官方的软件开发平台MindSDK支持的主要编译工具之一。

灵动凭借MM32SPIN0230/080G/060G电机控制MCU获“最佳电机控制器解决方案供应商”荣誉
2024年11月21日,在2024电机控制先进技术研讨会(秋季),“2024第五届电机控制技术市场表现奖”年度评选活动上,MindMotion灵动凭借多年在电机控制领域的优秀表现,荣获“最佳电机控制器解决方案供应商”奖,该奖项旨在通过业界共同推荐、评选出电机控制行业内市场表现优秀,具有技术和创新能力的企业。

MindMotion(灵动微) MCU选型表
32位高性能,高性价比MCU,Core核心有M0、M0+、2XM0、M3、STAR-MC1,Flash存储容量范围 16KB~2048KB,RAM存储容量范围 2KB~128KB,工作电压:1.8~48V,CPU频率(MHz):48~180MHz,GPIO 端口数(个):6~86,LQFP/TSSOP/QFN等多种封装形式。
|
产品型号
|
品类
|
内核
|
管脚数(个)
|
工作温度(℃)
|
CPU频率(MHz)
|
工作电压(V)
|
GPIO 端口数(个)
|
Flash(KB)
|
SRAM (KB)
|
封装/外壳/尺寸
|
|
MM32F0163D7PV
|
32位MCU
|
M0
|
64
|
-40℃~105℃
|
96MHz
|
2.0~5.5V
|
57
|
128KB
|
16KB
|
LQFP64
|
选型表 - MindMotion 立即选型

MindMotion(灵动微)MM32系列32位MCU选型指南
描述- 灵动微电子成立于2011年,是中国本土领先的通用32位MCU产品及解决方案供应商。灵动微电子的 MCU 产品以 MM32 为标识,基于 Arm Cortex-M 系列内核,自主研发软硬件和生态系统。
型号- MM32G0163D4PV,MM32L0XX,MM32F0144C6PM,MM32F5230,MM32SPIN580C,MM32G0020,MM32G0140,MM32L073PF,MM32F0133C4Q,MM32SPIN080GN,MM32SPIN560CM,MM32SPIN023C,MM32F0133C4P,MM32F5287L8PV,MM32SPIN533AM,MM32F0162D7P,MM32F0121C6P,MM32F0163D4Q,MM32SPIN0230,MM32SPIN080C,MM32F0141C1T,MM32L062NT,MM32F0020B1N,MM32F0144C1TV,MM32F5330,MM32G0001,MM32G0120,MM32F0144C1TM,MM32F0163D7P,MM32SPIN030CN,MM32G0121C1TV,MM32F0010A1TV,MM32SPIN07PF,MM32SPIN05PFOP,MM32SPIN0230B1TV,MM32SPIN37PSD,MM32G0001A6T,MM32F3270,MM32F0121C4P,MM32F0121C4Q,MM32F5277E9PV,MM32F5287L9PV,MM32F0163D6P,MM32F5333D6PV,MM32SPIN0280DAPV,MM32F0121C4N,MM32SPIN080G,MM32SPIN560,MM32F0144C4PM,MM32F0144C4PV,MM32F5280,MM32SPIN06NT,MM32F0140,MM32SPIN560C,MM32F0020,MM32G5333D6QV,MM32F0162D4Q,MM32F0050C1TV,MM32F0273D6P,MM32SPIN0230B3NV,MM32SPIN06PF,MM32G0144C4QV,MM32SPIN0280,MM32L052NT,MM32F5270,MM32F0144C4P,MM32F5277E8PV,MM32F031C6T6,MM32F0130,MM32F0010,MM32F0020B1TV,MM32F5333D7PV,MM32G0144C4PV,MM32SPIN080CN,MM32F0144C4Q,MM32SPIN060G,MM32L0136C7P,MM32F0133C7P,MM32SPIN05NW,MM32F5331D3NV,MM32F0040B1T,MM32SPIN05NT,MM32G0001A6T1V,MM32SPIN06PT,MM32F0120,MM32F0162D6P,MM32F5331D3NM,MM32F003NW,MM32G0160,MM32SPIN27NF,MM32F0163D4QM,MM32SPIN05PF,MM32F031,MM32F3273G6P,MM32F0163D4QV,MM32L0136B6P,MM32G0001A1TV,MM32F0133C6P,MM32SPIN0280D7PV,MM32F5277E7PV,MM32F0144C6P,MM32SPIN222C,MM32F0144C6PV,MM32F0010A6T,MM32G0001A1T,MM32F3273G7P,MM32L0130,MM32G0001A1N,MM32SPIN05PT,MM32G0121C4PV,MM32F0010A1T,MM32F5233D7PV,MM32SPIN27PF,MM32F0010A1N,MM32G5330,MM32SPINEBK,MM32SPIN07,MM32F3273G8P,MM32SPIN160C,MM32SPIN06,MM32F0040B1N,MM32SPIN0230B1NV,MM32L0136C6P,MM32SPIN05,MM32L0020,MM32F0050,MM32SPIN0280D6PV,MM32SPIN533,MM32F031K6U6,MM32F3273G9P,MM32F0163D6PM,MM32SPIN040C,MM32G0020B1T,MM32F0163D6PV,MM32F003,MM32SPIN37,MM32G0020B1N,MM32F0273D8P,MM32F0160,MM32L0136C3T,MM32F0040,MM32G0001A1NV,MM32SPIN0280D6QV,MM32F0144C1T,MM32F103CBT6,MM32F5233D6PV,MM32F0144C4QM,MM32F3273E6P,MM32SPIN27PQ,MM32SPIN27PS,MM32SPIN27PT,MM32L0136C4N,MM32SPIN27,MM32F0020B1NV,MM32F0270,MM32G0121C4QV,MM32F031F6U6,MM32F0273D7P,MM32F003TW,MM32G0144C1TV,MM32F3273E7P,MM32F0141B1T,MM32G0163D6PV,MM32F0163D7PM,MM32SPIN030C,MM32F0163D7PV,MM32F0131C7P,MM32F103,MM32SPIN05TW,MM32F031Y6Y6,MM32F0141C4P,MM32F0141C4Q,MM32F0141C4N,MM32F031K6T6,MM32F0010A1NV,MM32F0131C6P,MM32SPIN422C,MM32F0020B1T,MM32SPIN0280D4PV,MM32L0020B1T,MM32F103RBT6,MM32L0020B1N,MM32F031F6P6,MM32F0121C1N,MM32F0050C1NV,MM32F5333D4QM,MM32G0001A6TV,MM32SPIN360C,MM32,MM32F5333D4QV,MM32F0141C6P,MM32F0141B4P,MM32F0131C4P,MM32F0131C4Q,MM32SPIN0230B3TV,MM32SPIN533A,MM32SPIN033A,MM32F5287L7PV,MM32F5233D4QV


“MindMotion·Star“ Series: Major Member MM32F5260 Officially in Mass Production
At the Shenzhen Elexcon 2024 in late August, MindMotion Microelectronics officially unveiled the “MindMotion·Star” series of high-performance MM32 MCU products, featuring four sub-series: MM32F3, MindMotion Dubhe MM32F5, MindMotion Alioth MM32G5, and MindMotion Phecda MM32H5. MindMotion is excited to announce the formal launch of a key member of the MindMotion Dubhe sub-series: the MM32F5260.

【IC】灵动新推出32位MCU MM32F0120,主频高达72MHz,提供64KB Flash和8KB RAM
灵动微电子发布的MM32F0120,搭载Cortex M0内核,主频高达72MHz,提供64KB Flash和8KB RAM,最高支持48pin封装。适用于屏显控制、电动玩具、电源管理、马达控制、无线快充等多种应用场合。


【IC】“灵动·星”系列MM32高性能MCU产品搭载Star-MC1提供强劲内核动力,性能提升20%
“灵动·星”系列 MM32 高性能 MCU 产品,搭载安谋科技(Arm China)Star-MC1 内核性能,其1.5 DMIPS / MHz,提升 20% ,4.02 CoreMark / MHz,提升20% 。目前包含 4 个子系列: MM32F3,灵动·天枢 MM32F5,灵动·玉衡 MM32G5,灵动·天玑 MM32H5,为用户提供灵活、丰富的选择。

【IC】灵动发布全新入门级32位MCU MM32G0001系列,内置时钟全温度范围内偏差不超过±2%
灵动股份推出全新超值型MM32G0001系列MCU。2023年初,灵动首次发布了其主打高性价比的MM32G系列,目前已陆续推出了G0140,G0160和G5330系列产品。为进一步丰富MM32G系列产品组合,灵动和上下游合作伙伴通力合作,打造出全新入门级超值型MM32G0001系列MCU。

MindMotion MM32H5480 Triumphs with “2024 Hardcore MCU Chip Award“
MindMotion Microelectronics, as a frontrunner in the domestic market for general-purpose 32-bit MCU products and solutions, proudly secured the “2024 Hardcore MCU Chip Award“ for its high-performance product, the MM32H5480.

【经验】基于MM32F0163D7P的USB Audio Class(UAC)音频设备移植教程
在上一节我们在MM32F0163D7P 平台上成功的移植了TinyUSB,基于这个平台,今天我们来实现一个 uac2_headset 音频设备,这个设备支持基础的录音和放音功能,如果要支持音量调节/静音功能,还需要再添加一个 HID 变成复合设备。

MM32F0160的FlexCAN FD位时间采样点的计算
FlexCAN模块是一个通信控制器,扩展了CAN FD功能,遵循ISO 11898-1标准、CAN FD和CAN 2.0B协议规范。 CAN协议主要被设计用作车载串行总线,满足实时处理,带宽要求,车辆在电磁干扰环境下的可靠操作,该模块支持标准和扩展帧,支持最大64字节有效负载,传输速率高达 8Mbps,并且具有非常灵活的用于传输和接收的邮箱系统和RxFIFO接收机制。

【IC】灵动微电子高性能通用32位MCU产品MM32H5480荣获“2024年度硬核MCU芯片奖”
近日,第六届硬核芯生态大会在深圳举办,同期2024年度硬核中国芯获奖榜单正式发布。作为国内领先的本土通用32位MCU产品及解决方案供应商,MindMotion灵动微电子凭借高性能产品MM32H5480斩获“2024年度硬核MCU芯片奖”。

电子商城

现货市场


服务
可定制显示屏的尺寸0.96”~15.6”,分辨率80*160~3840*2160,TN/IPS视角,支持RGB、MCU、SPI、MIPI、LVDS、HDMI接口,配套定制玻璃、背光、FPCA/PCBA。
最小起订量: 1000 提交需求>
可烧录IC封装SOP/MSOP/SSOP/TSOP/TSSOP/PLCC/QFP/QFN/MLP/MLF/BGA/CSP/SOT/DFN;IC包装Tray/Tube/Tape;IC厂商不限,交期1-3天。支持IC测试(FT/SLT),管装、托盘装、卷带装包装转换,IC打印标记加工。
最小起订量: 1pcs 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论