【经验】解析扫地机中采用的线激光避障技术

随着科技的发展,扫地机逐渐走进千家万户。过往扫地机因避障能力差,工作时处处碰壁,被戏称为“人工智障”,经过近几年的发展,扫地机已能很好地解决避障问题,算是对得起“人工智能”的称号了。其实这一进步,恰恰就是核心避障功能模块技术的进步。
常见的避障方案有哪些?
①红外对管避障(短距离感应且无测距功能)
②单双目避障(高清晰度,但深度信息不能直接获取)
③结构光避障(距离远,可测距,一定情况下受环境光干扰)
④红外PSD传感避障(短距离,可测距,但精度不高)
⑤3D TOF(更多用于扫地机顶部LIDAR偏向于导航和二维平面建模,辅助避障)
表 1

除了红外对管避障和红外PSD传感避障以外,我们来说说目前市面上主流的另外4种避障技术
基于可见光的单目摄像头 和 双目摄像头
基于不可见光-红外光的3D TOF和 3D结构光--双线激光
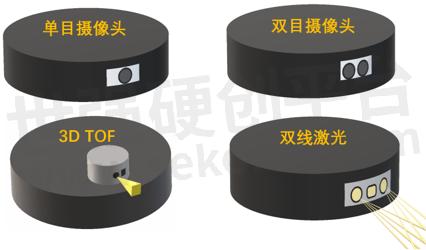
图 1
单/双目摄像头避障技术——视觉避障
单目避障,障碍物的形状通过单个摄像头来记录,再由算法来识别当前物体的大小和距离,但是对于数据库内不存在的物体则无法进行判断。而双目避障则不会出现这样的情况,除了拥有视觉识别特有的优势以外,双目避障系统通过双摄像头所记录的信息,利用平行拍摄的方法,识别两个摄像头所记录图像的差别,可以提供更多的数据用于识别障碍物的种类。综合来说,从实用性的角度来考量,使用双目识别技术的扫地机器人能更好地适应工作环境,同时就避障性能来说,也能够识别出更多种类的障碍物,然后再通过数据库和算法选择应对方式。

图 2
3D TOF避障技术——更多偏向于LIDAR导航和二维平面建模
TOF技术从它的名字上就能大概了解其原理——time of flight,飞行时间,主要是通过发射光线,光线遇到不可穿透物体会发生反射,通过记录反射光达到接收器的时间,由于光速和光波长已知,来计算光源和物体的距离。此技术更多使用单点TOF方案,用于扫地机顶部的LIDAR通过转向扫描获得环境深度信息来辅助避障,但更多的是偏向于最终达到导航和二维平面建模的效果。
3D结构光避障技术——扫地机中更多采用线激光
3D结构光方案,其原理是采用红外光源,发射出来的光经过一定的编码投影在物体上,这些图案通过物体表面反射回来时,随着物体距离的不同会发生不同的形变,图像传感器将形变后的图案拍下来。随后,通过计算拍下来的图案里的每个像素的变形量,来得到对应的视差,进而得到深度值。不过结构光方案测距范围受光斑图案影响,避障范围较小。另外强光环境下表现差,容易受光线影响。
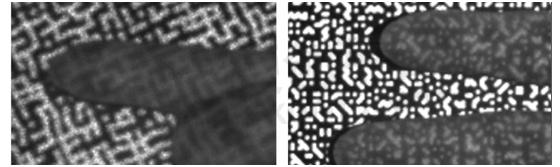
图 3 3D结构光
双线激光
两根交叉的线激光共同工作,再通过扫地机的移动来建立立体地图。双线激光避障的优势是对抗环境光干扰能力相对比较强;面对暗光环境,当光线变暗时,相机里的物体就基本看不清了,而在红外光的补光作用下,扫地机依然能够清晰看到前方的路,其实可以理解成扫地机器人一直拿着手电筒照射前方,而这个手电筒出来的光,我们人的肉眼看不到。而对于强光环境,环境光中的红外光比较强烈,这个时候就需要机器里的红外光足够的强来削弱环境光中的干扰。
扫地机里采用的线激光,并不是一直持续输出的,而是按照一定的频率来工作的。在相同的单位时间里,只要线激光模组更频繁地工作,扫地机就能获得更多的信息,从而帮助扫地机更快地判断出障碍物,所以不管是面对突然出现的人,宠物或者是其他杂物,扫地机都能判断障碍并躲开。
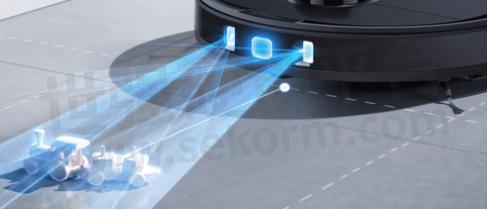
图 4 双线激光
关于柠檬光子
深圳市柠檬光子科技有限公司是一家由半导体激光行业海归专业团队和风险投资以及产业投资机构共同创办的高科技企业,致力于高端半导体激光芯片以及激光投射光源模组的产业化。拥有国际领先的全方位半导体激光技术和工艺,包括独家拥有的新一代激光芯片技术。公司以自主的核心技术为基础,致力于打造一站式半导体激光芯片及光源解决方案的核心光源元器件供应商。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由三年不鸣转载自柠檬光子官网,原文标题为:扫地机中采用的线激光避障技术,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

【经验】红外线光电开关中VCSEL与LED光源的比较分析
新亮光子的VCSEL芯片与同行相比,同等功率情况下,发光区面积较小,功率密度较高,有利于光学设计。VCSEL二极管广泛应用于智能门锁接近感应,智能扫地机器人的悬崖传感、安全光幕、智能水龙头开光、激光医疗,手势识别等,能完美替换LED。

【经验】圣邦微DCDC升压控制器SGM661用于扫地机系统的开发经验分享
伴随着目前电子行业的飞速发展,为了更好提扫地机器人稳定性,现在不少大体量公司选用圣邦微DCDC控制器SGM6601用于扫地机系统的开发设计。本文将阐述关于SGM6601用于扫地机系统的开发经验分享,希望对大家能有所帮助。

【经验】有关蓝海光电测距传感器LDS-E100-R在扫地机上设计注意事项
不少人选用蓝海光电推出的测距传感器LDS-E100-R做扫地机设计。现在针对LDS-E100-R的设计注意事项给大家做个简单介绍,希望对大家能有所帮助。


基于SPAD技术的激光雷达ToF接收芯片R5001,体积较同类产品减少50%
R5001是一款基于SPAD技术的激光雷达ToF接收芯片,和激光发射器、驱动电路一起构成小型的激光雷达模块,用于扫地机、AGV 的SLAM 建图,机器人避障,测距等场景,具有使用简便、测距精度高、帧率高、抗阳光等特性。

合科泰1117/A-3.3线性电源IC、HKTG40C40 MOS管等产品助力智能扫地机器人高效清洁
智能扫地机器人一般包括金属材料、塑料、包材、零部件以及相关辅件等,元器件部分主要包括芯片、传感器、电机、电子元器件、锂电池、激光雷达、控制器、减速器、执行器、地刷等。智能扫地机器人是由哪些产品组成,它通常需要哪些分立器件产品?本期合科泰给大家介绍。


深圳市奥伦德元器件有限公司
描述- 奥伦德公司成立于1998年,专注于研发和制造光电耦合器、光电器件及其晶圆。公司产品涵盖通讯、电力、家电、汽车、新能源等行业,拥有400多个光耦型号。奥伦德是国内红外芯片研发生产龙头,拥有23年红外芯片研发与制造经验,产品通过UL、VDE等国际认证。公司工程技术中心获评深圳市和广东省光电耦合器工程技术中心,拥有多项荣誉和认证。
型号- OR-2531,OR-2530,OR-3223,OR-0631,OR-M3074,3120,M4XXA,OR-1009系列,50L,OR-3H4,357,OR-814,ORPC-851,OR-357系列,ORTR-9707,OR-3H7,OR-M3082,OR-M3083,OR-606A,OR-063L,OR-M3081,OR-480,OR-4N25系列,OR-50LW1,OR-M3084,OR-3H4-4,OR-3H4-2,OR-M460A,OR-6N137,OR-MOC3052,OR-6N136,OR-MOC3051,OR-460A,OR-6N135,OR351,OR-MOC3053,35X,OR-6N139,OR-6N138,OR351系列,OR-840A,OR-917系列,3HX系列,OR-M3053,OR-M3051,OR-1223,ORTR-20001-T,OR-M3052,10XX,OR-357,OR-3120,OR-355,OR-MOC3061,OR-354,OR-MOC3063,OR-MOC3062,OR-1008系列,OR-917,6XXA,OR-MOC3064,OR-M425A,OR-354系列,ORPC-815系列,OR-825A,817,6N137,10XX系列,OR-M3061,3H7,OR-M601,OR-2601,OR-M3064,ORTR-8402-F-A,OR-M3062,OR-M3063,601J,OR-MOC3074,OR-640A,OR-406A,OR-T350,50LW,3HX,C87,OR-M611,OR-2611,OR-4N25,OR-MOC3081,OR-MOC3083,OR-825系列,OR-MOC3082,OR-MOC3084,4XXA,ORAP-29044,OR-1009,OR-355系列,ORTR-9909,OR-M3022,OR-341W,OR-1008,OR-M3023,OR-50LW,OR-625A,OR-2223,OR-314W,ORPC-815,ORPC-817,OR-M501,OR-AQV259,ORTR-8307,OR-AQV258,OR-845,OR-3150,MOC30XX,OR-844,OR-4N30,OR-M440A,X223,OR-3H4系列,OR-847,OR-60LW1,OR-440A,OR-860A,OR-4N30系列,OR-2630,OR-152,ORTR-9606,OR-343W,35X系列,OR-060L,OR-2631,OR-845系列,ORPC-2501,ORTR-352,ORPC-2501系列,OR-MOC3021,60L,OR-MOC3023,851,OR-MOC3022,OR-425A,ORPC-817系列,60LW,ORTR-9608,OR-806A,OR-60LW,ORPC-851系列,OR-M3021,OR-0223,AQV258,OR-3H7-4,063L,OR-3H7-2,OR-814系列,341,OR-3H7系列,OR-M406A,0631,OR-827,OR-825,OR-660A,OR-824

SYNEXENS基于D-ToF技术的单光子探测全集成接收芯片R5001,为机器人领域带来全新变革
SYNEXENS发布基于D-ToF技术的R5001芯片,为机器人领域带来了全新的变革。该芯片是一款单光子探测的全集成接收芯片,解决了机器人(扫地机机器人、AGV、物流小程、低速无人车)激光雷达设计复杂、组装校准难度高、成本高等难题。


【选型】国产氮化镓驱动芯片MX5114T用于激光发射器,导通阻抗0.4ohm,爬升时间典型值6ns
客户新项目的一款低成本方案的扫地机器人上的一个激光发射器上面,Vbus电压小于20V,激光器峰值电流7A左右。需要可以单独控制输出,因此想采用芯片内部的下拉mos开关器件的方案替代驱动器加外置MOS开关左右。无锡明芯微的氮化镓驱动芯片MX5114T可以完全满足激光雷达应用的设计要求。

全方位3D传感技术方案商上海矽印授权世强先进代理旗下全线ToF传感器芯片产品
世强先进(深圳)科技股份有限公司(下称“世强先进”)于2022年10月1日,和一家全方位3D传感技术方案商——上海矽印科技有限公司(下称“上海矽印”)签署全线产品代理协议,包括CS10单点激光雷达,CS20图态激光雷达,CS30 RGBD深度相机等全线产品。

【方案】低成本智能扫地机器人测距模块优选元器件方案
描述- 智能路线规划机器人采用测距模块收集环境信息,包括激光、超声、红外等。激光测距方案采用激光收发对管和跨导放大器/驱动器的组合实现信号的收发处理,成本较高。本方案通过采用圣邦微公司的低成本高速运算放大器、Silicon Labs公司的高性能MCU及EPC公司的高性能eGaN MOS管,在保证产品测试精度和可靠性的前提下,削减产品设计成本,提升产品市场竞争力。
型号- EPC2036,SGM7SZ08,SGM6607,SGM7SZ04,SGM8061,SGM41285,SGM80582,TSX-3225,SGM8743,EFM32PG,RX8010SJ,SGM2019,SGM4547

【应用】国产DCDC升压芯片SGM41285用于扫地机器人导航模块,可倍压升压至210V
扫地机器人的导航模块部分一般采用TOF的方式进行地图信号的采集,某客户的产品中采用的210V的电源给激光管供电,客户采用5V的无线供电的输出部分作为输入电压值,通过圣邦微电子的DCDC升压芯片SGM41285升压至70V,之后再采用三倍压电路倍压至210V。
集半导体功率器件设计开发、芯片制造、封装测试及产品营销为一体的高新技术企业公司简介
描述- 明芯微电子是一家专注于模拟和数字混合芯片研发与销售的高新技术企业。公司产品涵盖AC-DC电源芯片、高速驱动芯片、比较器、放大器、E-Fuse、RS485、LDO等,广泛应用于手机快充、适配器、激光雷达、扫地机、储能等领域。公司主要产品包括低边驱动芯片、电子保险丝、上下桥驱动芯片、反激芯片等,具有传输延迟短、环路控制稳定、成本降低等特点。
型号- SSR MX121X 系列,MX57254,MX58,MX52,MX42,MX8000,MX8000 系列,MX58 SERIES,MX52 SERIES,MX1663 SERIES,MX1663,SSR MX121X,MX42 SERIES

服务
可定制UV胶的粘度范围:150~25000cps,粘接材料:金属,塑料PCB,玻璃,陶瓷等;固化方式:UV固化;双固化,产品通过ISO9001:2008及ISO14000等认证。
最小起订量: 1支 提交需求>
可定制丙烯酸酯胶粘剂的粘度范围:250~36000 mPa·s,硬度范围:50Shore 00~85Shore D,其他参数如外观颜色,固化能量等也可按需定制。
最小起订量: 1 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论