GNSS Modules Command Introduction: “log sysconfig”


“Is there a way to view the current configuration of my module?” Comnavtech met many clients are curious about the current configuration of SinoGNSS K8 OEM board, in today's article, we will introduce the most frequently used information about the system configuration. By command “log sysconfig”, clients can check basic configuration, rtk configuration and work mode like PPS, Event, and SBAS.This command is suitable for most K8-series GNSS modules.
Here shows with ComNav CRU software, to give command “log sysconfig” and its output messages.

1.Basic configuration
In basic configuration, it shows the configuration of calculation rate, satellites cut angle, locked satellites and some other information.
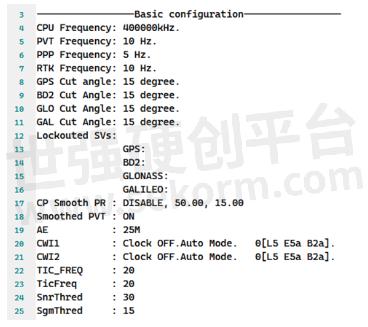
• CPU frequency
In some cases high update rate observation, PVT or RTK is needed, the default CPU core frequency couldn’t bear so huge calculation load, so a high frequency is necessary, at the same time, it means more power cost.
• PVT/PPP/RTK frequency
The message refer to PVT/PPP/RTK calculation rate.
In K8 series board, the default settings is 5HZ, if a higher or lower PVT update frequency is needed, this command could configure the PVT update rate at most 20hz.

• GPS/BD2/GLO/GAL cut angle
These message sets the elevation cut-off angle for tracked. The board does not start automatically searching for a satellite until it rises above the cut-off angle. Tracked satellites that fall below the cut-off angle are no longer tracked unless they were manually assigned.

• Lockouted SVs
Prevent the board from using a satellite system. This message prevents the receiver from using satellites in the specified system in the solution computation.
![]()
• CP Smooth PR
A method of combination of CP and PR, to get a higher quality observation.

• Smoothed PVT
In single-point positioning, ComNav Technology have adopted an advanced smoothing filter to enhance pass to-pass accuracy, which need send commands as:

• INS Control
The INS (Inertial Navigation System) Mode allows OEM modules to continuously output positioning information through IMU in a short time when losing satellites signal.
ENABLE: INS enabled; DISABLE: INS disabled
1/2/3/4/5/6/7/8: IMU axes type
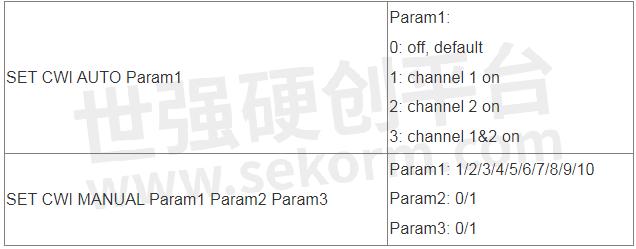
• CWI1/CWI2
K8 OEM modules support two channels to active anti-interference, it refers to CWI1 and CWI2. Clients can enable CWI by auto mode, or manually select the channels. Details can refer to ComNav OEM commands list: CNT-OEM-RM001_Rev_2.3_20220507
2.RTK configuration
This part is the receiver's processing scheme for RTK, and the current working status information.
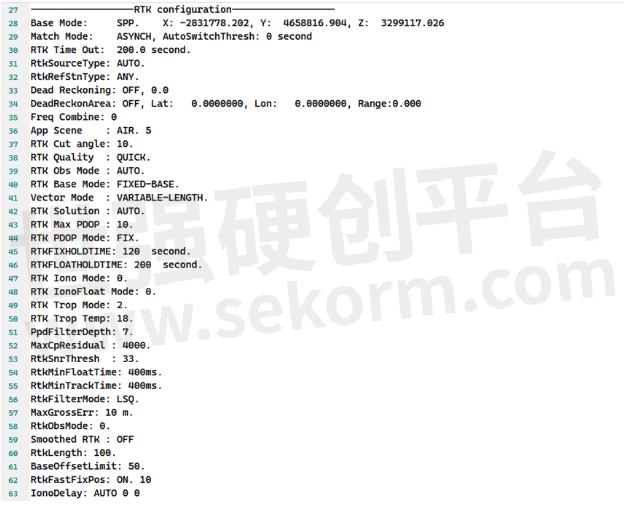
• RTK Time Out
This command is used to set the maximum age of RTK data to use when operating as a rover station. RTK data received that is older than the specified time is ignore.
After rtk disconnects the differential, after 200 seconds, it will exit fixed status.
![]()
• RTKFIXHOLDTIME
This command is used to set the maximum age of RTK fixed data to use when operating as a rover station. RTK fixed data received that is older than the specified time is ignored.

• RtkSourceType
This command is used to identify from which base station to accept RTK differential corrections. This is useful when the receiver is receiving corrections from multiple base stations.

• RtkRefStnType
This command sets the station ID value for the receiver when it is transmitting corrections. This allows for the easy identification of which base station was the source of the data.

• App Scene
This command can be used to set the application mode. In different modes, the RTK engine should process different styles of observation data to improve the performance of the RTK engine.
For example, if you use ComNav K8 series as drone gps module, there will setup APP Scene mode to air.

Other options are suggested to keep as default.
3.COM configuration
These message shows the status(normal mode or differential mode) for all COM ports.

4.PPS configuration
PPS, which stands for "Pulse Per Second," is a precise timing signal often used in various applications that require accurate time synchronization.
![]()
With PPS function, you can set the polarity, period and pulse-width of PPS output.
Format: PPSCONTROL <switch> <polarity> <period> <pulse-width>

• <switch> supports “enable” or “disable”, notice that “disable” is invalid.
• <polarity> supports “positive” and “negative”, “positive” means high level pulse mode and “negative” means low level pulse mode.
• <period> in seconds, the update rate can be up to 10Hz.
• <pulse-width> in microseconds, pulse-width should be less than half of period.
5.EVENT configuration
Event refers to a significant occurrence, action, or incident that triggers a response or a change in the system's state. Events can be both planned and spontaneous, and they are often used to capture and manage important moments within a system.

Format: MARKCONTROL <signal> <switch> [polarity] [timebias] [timeguard]]
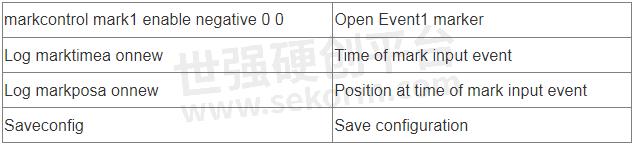
• <signal> supports the key words “mark1” and “mark2”.
• <switch> supports the key words “enable” and “disable”.
• [polarity] supports the key words “positive” and “negative”, which separately represent “positive pulse” and “negative pulse”.
• [timebias] A constant time bias in nanoseconds can be applied to each event pulse. Typically this is used to account for a transmission delay.
• [timeguard] The time guard specifies the minimum number of milliseconds between pulses. This is used to coarsely filter the input pulses.
6.PVT configuration
For PVT configuration, parameters normally used for R&D debug.

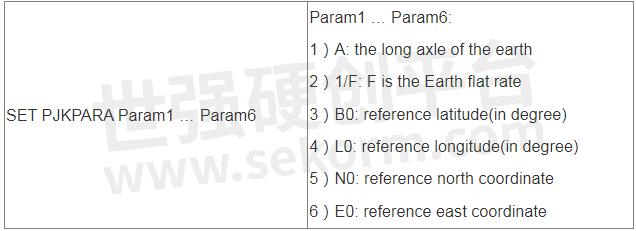
7.Parameter Offset configuration
In this section, it provides parameters for datum and some offset value.

• PJK Parameter: A:6378137.000, 1/F:298.257223563, B0:0.000000deg, L0:120.000000, N0:0.000, E0:500000.000.
• HeadingOffset
This command is used to add an offset in degree in the heading and pitch values of the HEADING, GPHDT, GPNAV, GPTRA, GPYBM and PTNL,AVR logs.
Both heading offset and pitch offset have the default values of 0 degree.

8.SBAS Configuration
SinoGNSS K8-series all support SBAS function.

9.Other Configuration
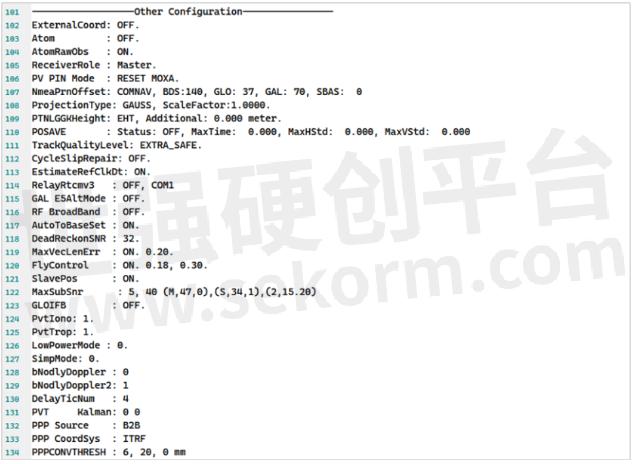
• IMU(INS)
Smoothed DR: OFF // INS smoothing DR TimeOut : 300 // INS hold time
DR InitV: 3.0 // Inertial navigation initialization speed
DR LeverArm: 0.00, 0.00, 0.00 // INS arm value
- |
- +1 赞 0
- 收藏
- 评论 0
本文由翊翊所思转载自ComNav Technology News,原文标题为:Command Introduction: “log sysconfig”,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

【经验】深度解析GNSS模块的冷/热启动是什么?
GNSS的基本定位原理是卫星不间断地发送自身的星历参数和时间信息,用户在接收到这些信息后,经过计算得出模块的三维位置、三维方向以及运动速度和时间信息。信号强度、芯片运算能力存在差异,将模块定位时长按快慢进行排序:热启动>温启动>冷启动。

GNSS Spectrum Function and Low-power Anti-interference Technology for ComNav Technology K8-series GNSS Module
Low-power Anti-interference (LAI) technology is ComNav patented advanced anti-narrowband and anti-continuous-wave interference technology. The SNR can reach 60dB and the power consumption is only 0.1W when enabled.

How to Active the Event Option for Your GNSS Module K8 series from ComNav Technology
Event technology refers to enhancing the acquisition and utilization of location information by capturing and processing specific events related to location.The technology records the precise moment and precise coordinate information of an event. When the module receives the EVENT triggers pulse signal, it locks the data at the corresponding time in time for processing, and outputs the original observation, time, position and other information.

司南导航(Comnav Technology)K8系列北斗/GNSS高精度定位模块选型指南
目录- 公司介绍 核心技术 K系列模块对比表 高精度模块 数传模块 北斗RDSS短报文通信模块 行业应用 服务与支持 生产与管理
型号- EVK-QD302,CRU,K8-U70,RD02,K803+U70,CDL7,K系列,QD302,K803_EK0405,EVK-K823,U703,EVK-K803,K803_EK0407,K801,K823,W803,GBAS,K802,U70,K827,K803,K823_EK0407,K807,K8系列,K823+U70,K803_EK0610

【技术】GNSS模块/板卡数据质量快速评估方法详解:零基线法和原始数据质量分析法
随着北斗三号的全球组网以及LBS、物联网和智能驾驶的发展,GNSS模块开始向小型化、集成化方向发展,GNSS应用也从专业应用走向大众应用。对用户而言,GNSS仍具有较强的专业性,在使用中难免会遇到各类问题。本文介绍GNSS模块的快速评估方法供大家参考。

K系列OEM板用户指南
描述- 本指南为ComNav Technology K系列OEM板提供了安装、配置和操作说明。指南涵盖了OEM板的概述、评估套件、相关文档、安装指南、CRU软件配置、工作模式配置、常用命令和固件更新等内容。指南详细介绍了如何使用CRU软件进行OEM板的配置,包括状态检查、命令接口、NTRIP配置、数据记录配置和数据管理。此外,还介绍了不同工作模式的配置,如平滑模式、SBAS模式、RTK模式、RTD模式和移动基线模式。最后,指南还提供了常用命令的说明。
型号- K728,K706,K726,K803,K705,K708,K-SERIES,K823,K700,K8-SERIES

实现毫米级实时定位,司南导航提供车规级高精度GNSS定位模块
2022年5月1日,司南导航(股票代码:833972)与世强达成合作,授权世强代理旗下全线产品,为用户提供全方位、多领域的高精度北斗芯片和高精度GNSS芯片、板卡、终端和系统解决方案。司南导航产品已全线上线平台,搜索“司南导航”即可获取更多产品资讯。

司南导航:深耕高精度北斗技术,助推行业创新发展
企业如何加快培育新质生产力?荣获上海专精特新“小巨人”企业市场竞争力指数百强企业前十的上海司南卫星导航技术股份有限公司,以“北斗高精度+”为布局,瞄准北斗创新应用和技术前沿,厚植新质生产力,正积极塑造未来发展新动能和新优势。

司南导航(Comnav Technology)GNSS模块选型表
目录- GNSS模块
型号- K827,K823E,K8,K803‐U70,K9,K803_EK0405,K803 LITE‐QD302,EVK‐K823,EVK‐K803,K802S,K823‐U70,K803_EK0407,K11,K10,K801,K823,K802,K803LITE,K803,K823_EK0407,K825,K803S5,K807,K825S,K827S,K803_EK0610,K801S,K823S

【应用】司南导航AG360北斗农机自动驾驶系统助力农机导航,定位误差不超过±2.5厘米且支持AB线共享作业
司南导航的农机导航产品,不仅操作简单、信号稳定、适配广泛,而且还提供24小时售后服务。让农业生产更加高效、节省成本,同时保证农业生产的质量和产量,为农业生产带来更多的福音。

司南导航携最新科技成果及行业应用解决方案亮相首届河北省测绘地理信息大会
3月6日-8日,以“科技引领·创新驱动·跨界融合·产业强省”为主题的第一届河北地理信息大会在石家庄国源朗怡酒店盛大召开。司南导航携最新科技成果及行业应用解决方案亮相T022展位,与参会专家和企事业代表交流最新地理信息技术成果,共谋测绘地理信息赋能高质量发展新图景。

【应用】司南导航北斗/GNSS农机自动导航驾驶系统用于水田喷药机,具有快准省稳、上坡下地零压力等优势
由于喷药设备重心较高,北斗自动导航驾驶设备安装过程较为繁琐,同时,为保证用户的使用安全,需要在自动驾驶控制方面增加特殊保护机制,这项技术在国内较为罕见。司南导航此项技术的成功运用,填补了北斗自动导航驾驶系统在水田喷药机应用上的一项空白。

司南导航以北斗/GNSS芯片、板卡/模块为支撑,加速推进“北斗+”应用
在向“新”而生、提质升级浪潮的推动下,司南导航以北斗/GNSS芯片、板卡/模块为支撑,探索“北斗+”创新沃土,牢牢把握高质量发展的首要任务,因地制宜发展新质生产力,加速融入测量测绘、精准农业、形变监测、智能驾驶、数字施工、人员定位等行业的基础设施建设,为北斗高精度定位服务的安全、稳定、可靠提供有力保障。

【应用】司南导航基于北斗/GNSS高精度定位定向模块K8,提供超强抗干扰的厘米级精准农业解决方案
司南导航基于K8系列北斗/GNSS高精度定位定向模块,利用GNSS卫星的定位定向数据辅助农机设备进行现场作业,在作业过程中实时提供精准的位置、方向信息,厘米级定位辅助导航路径规划,具备高精度、高可用、高覆盖等性能优势。

致礼北斗科研 | EVK-北斗开发套件免费体验活动启动!
EVK-北斗开发套件免费体验活动启动!K8系列评估板(以下简称EVK-K8)是一款具备高精度定位和定向功能的套件,提供多种电气接口,实时交互式显示,易于使用,可扩展性强。适用于K系列RTK模组功能、性能的测试评估。

电子商城

服务
Ignion可支持多协议、宽频段的物联网天线方案设计,协议:Wi-Fi、Bluetooth、UWB、Lora、Zigbee、2G、3G、4G、5G、CBRS、GNSS、GSM、LTE-M、NB-IoT等,频段范围:400MHz~10600MHz。
最小起订量: 2500 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论