基于CW32的MPU6050姿态传感器的应用开发配置教程


MPU6050是一种常用的六轴姿态传感器模块,结合了三轴陀螺仪和三轴加速度计,以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。MPU6050 对陀螺仪和加速度计分别用了三个16 位的ADC(0~65535),将其测量的模拟量转化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都是用户可控的,陀螺仪可测范围为±250,±500,±1000,±2000°/秒(dps),加速度计可测范围为±2,±4,±8,±16g。并有可编程的低通滤波器。MPU6050模块的应用场景非常广泛,包括但不限于以下几个领域:
(1)姿态感知与控制:通过读取陀螺仪和加速度计的数据,可以实时获取物体的姿态信息,如倾斜角度、旋转角度等。这在飞行器、机器人、无人车等项目中非常常见,用于实现姿态感知和控制。
(2)运动跟踪与手势识别:MPU6050可以用于捕捉人体运动轨迹,如手部的姿态和手势,从而实现运动跟踪、手势识别、虚拟现实交互等应用。
(3)震动检测与防抖:结合加速度计,MPU6050可以检测到物体的震动和冲击,用于防抖技术、硬盘保护、运动检测等。
(4)步态分析与健康监测:MPU6050可以用于分析人体的步态特征和动作,用于健康监测、运动分析、姿势校正等。
所需物料+寄存器说明
本实验使用到了CW32F030C8小蓝板、GY-521模块、0.96寸OLED显示屏Keil5开发环境

【GY-521模块与单片机连线】:VCC<-->+3.3V
GND<-->GND
SCL<-->PB5
SDA<-->PB4
【OLED显示屏与单片机连线】:VCC<-->+3.3V
GND<-->GND
SCL<-->PA1
SDA<-->PA2
注:SCL和 SDA是连接MCU的 IIC接口,MCU通过这个IIC 接口来控制MPU6050,另外还有一个 IIC 接口: XCL和XDA ,这个接口可用来连外部从设备比如磁力计,这样就可以组成一个九轴传感器。AD0是MPU6050的地址控制引脚,该引脚控制的是IIC 地址的最低位。MPU6050的默认IIC地址是:0X68,如果AD0接VDD,则是0X69。需要注意的是:这里的地址0x68(110 1000)和0x69(110 1001)是不包含最低位的7位数据,通常最低位用于表示IIC主机的读取数据/写数据模式。如默认情况下对MPU6050进行写操作,则发送地址0xD0(1101 0000),读操作则发送地址0xD1(1101 0001)。
寄存器说明:

该寄存器是配置陀螺仪输出速率的分频器,用于为MPU-6050生成采样速率。这里有个公式:采样频率=陀螺仪输出频率/(1+采样分频数)。当 DLPF(数字低通滤波器,见寄存器Configuration)禁用时,陀螺仪输出频率为8kHz;当 DLPF 使能,陀螺仪输出频率=1KHz。
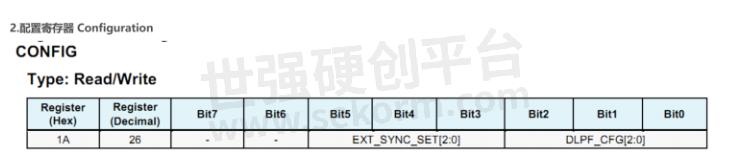
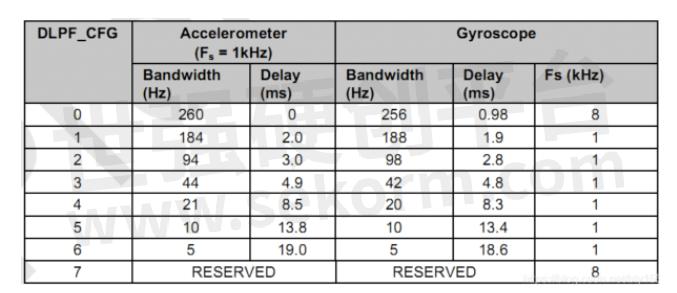
该寄存器为陀螺仪和加速度计配置外部帧同步(FSYNC) 管脚的采样和数字低通滤波(DLPF)设置。其中,数字低通滤波器DLPF由DLPF_CFG配置。根据下表所示的DLPF_CFG值对加速度计和陀螺仪进行滤波。
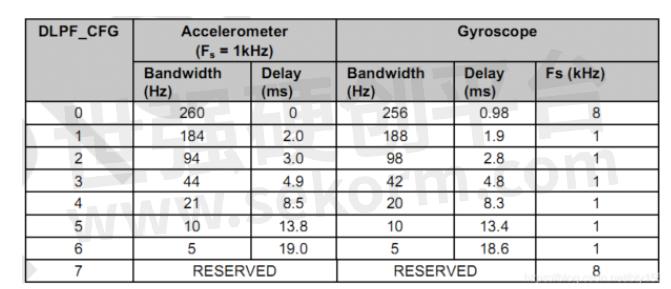
FS为陀螺仪输出频率。SMPLRT_DIV由预设定的采样频率根据上述的公式计算得出。一般情况下,DPLF滤波频率为采样频率的一半,如设定采样频率为50Hz,由表可知当FS为1kHz,SMPLRT_DIV的值为1000/50-1=19。
该寄存器是用来触发陀螺仪自检和配置陀螺仪的满量程范围。其中,XG_ST、YG_ST、ZG_ST分别用来设置陀螺仪X轴、Y轴、Z轴自检,置0则不触发自检。FS_SEL[1:0]用于设置陀螺仪的满量程,如下表:
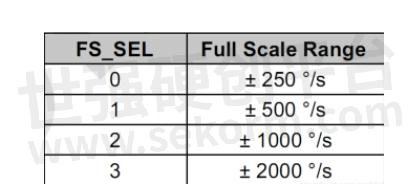
我们一般设置为3,即满量程为±2000°/s

该寄存器是用来触发加速度计自检和配置加速度计的满量程范围。同时这个寄存器也可以用于配置数字高通滤波器(DHPF)。其中,XA_ST、YA_ST、ZA_ST分别用来设置加速度计X轴、Y轴、Z轴自检,置0则不触发自检。AFS_SEL[1:0]用于选择加速度计的满量程范围,如下表:
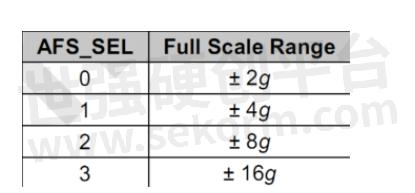
我们一般设置为0,即满量程为±2g

ACCEL_XOUT :由 2部分组成的 16位数值存储最近X 轴加速度计的测量值。ACCEL_YOUT :由 2部分组成的 16位数值存储最近Y 轴加速度计的测量值。ACCEL_ZOUT :由 2部分组成的 16位数值存储最近Z 轴加速度计的测量值。
以ACCEL_XOUT为例,若倍率设定为2g,则意味着ACC_X取最小值-32768时,当前加速度为沿X轴正方向2倍的重力加速度;若设定为4g,取-32768时表示沿X轴正方向4倍的重力加速度,以此类推。显然,倍率越低精度越好,倍率越高表示的范围越大,这要根据具体的应用来设定。以ACC_X为例,若当前设定的加速度倍率为4g,那么将ACC_X读数换算为加速度的公式为:

g可取当地重力加速度。

该寄存器存储最近加陀螺仪的测量值,构成与加速度计测量值寄存器相同,不做赘述。
以GYR_X为例,若倍率设定为250度/秒,则意味着GYR取正最大值32768时,当前角速度为顺时针250度/秒;若设定为500度/秒,取32768时表示当前角速度为顺时针500度/秒。显然,倍率越低精度越好,倍率越高表示的范围越大。以GYR_X为例,若当前设定的角速度倍率为1000度/秒,那么将GRY_X读数换算为角速度(顺时针)的公式为:
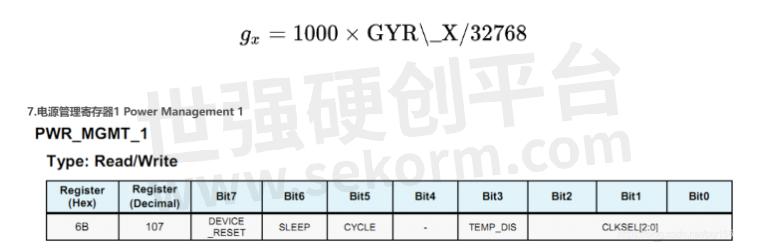
该寄存器允许用户配置电源模式和时钟源,还提供了复位整个设备和禁用温度传感器的位。当置SLEEP位为1时,MPU-60X0 可以进入低功耗睡眠模式。该寄存器的最低三位用于设置系统的时钟源选择,默认值是0(内部8M RC振荡),不过一般设置为1,即选择x轴陀螺仪PLL作为时钟源,以获得更高精度的时钟。DEVICE_RESET该位置 1,重启内部寄存器到默认值。复位完成后该位自动清0。TEMP_DIS该位置 1,禁用温度传感器。
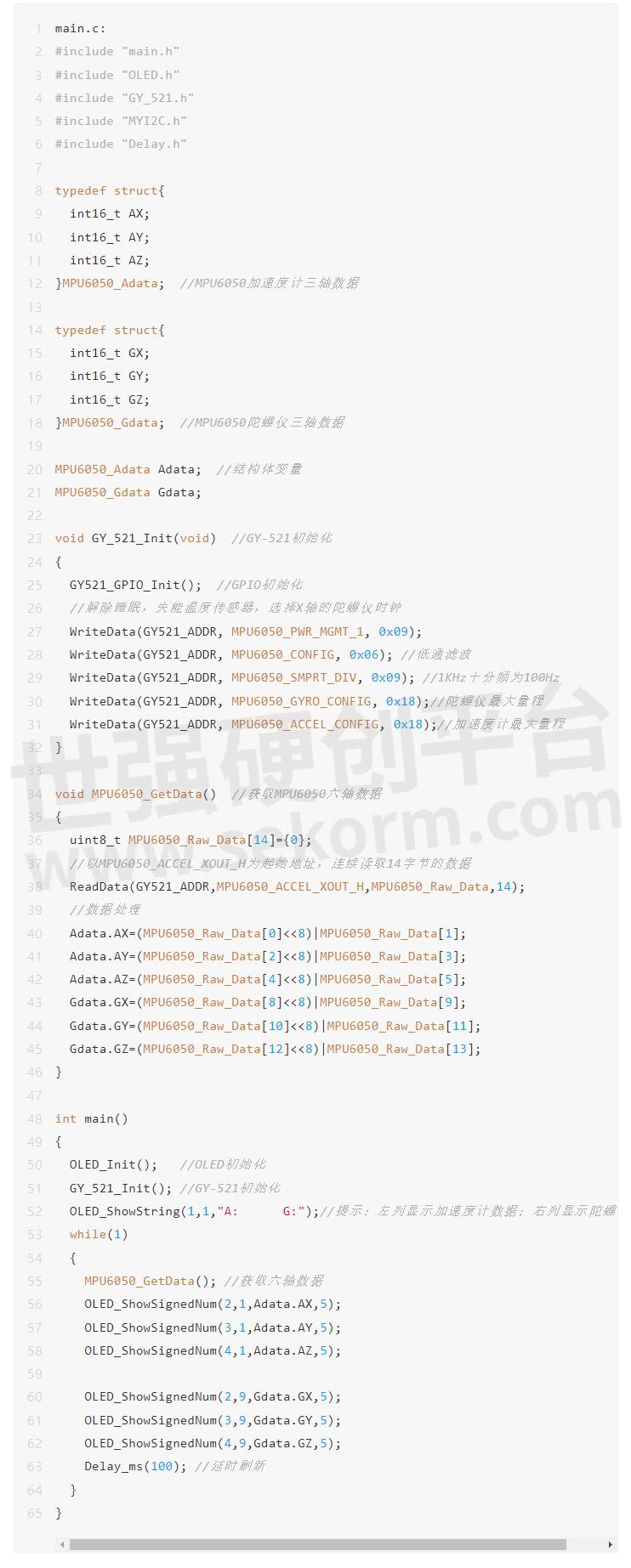
核心代码
效果演示
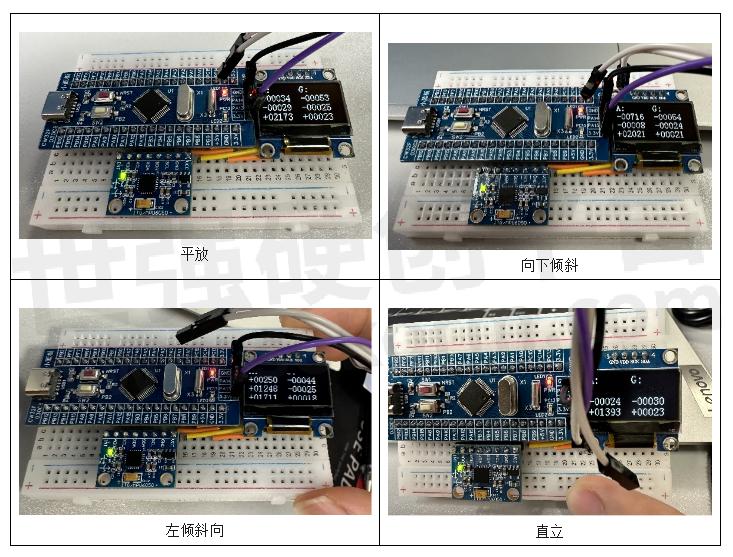
读到的原始数据还不能直接使用,要转化成四元数,欧拉角后,获得器件的姿态角才有用,而 MPU6050 自带了数字运动处理器,即 DMP,并且,InvenSense 提供了一个 MPU6050 的嵌入式运动驱动库,结合 MPU6050 的 DMP,可以将我们的原始数据,直接转换成四元数输出,而得到四元数之后,就可以很方便的计算出欧拉角,从而得到yaw、roll和pitch。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由咪猫转载自武汉芯源 微信公众号,原文标题为:【CW32】基于CW32的MPU6050姿态传感器的应用,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

武汉芯源半导体安全低功耗MCU CW32L010 | 新品使用初体验
CW32L010新品的正式发布,标志着嵌入式技术领域的又一次创新突破。今日,我们有幸进行该新品的首次使用体验,以一块L010核心板为例,体验一下这颗芯片

【经验】武汉芯源CW32系列MCU PWM输出功能指南
脉冲宽度调制(PWM),是在数字电路中达到模拟输出效果的一种手段,常见应用电机调速,照明灯调光等。在MCU中,主要通过定时器单元来时实现PWM输出,以CW32L083VxTx为例,LPTIM,GTIM,ATIM都可以输出PWM信号。

使用通用串口模块下载CW32F030芯片的方法
在常见的客户技术支持中,常有需要串口下载CW32芯片的问题,现整理一份文档供参考。


【CW32】基于CW32的GY-33颜色识别模块的应用
GY-33是一种基于TCS34725颜色传感器的颜色识别模块。TCS34725是一种高精度光学传感器,能够检测红、绿、蓝三个基本色的光谱信息,从而实现对物体颜色的准确识别,本实验使用到了CW32F030C8小蓝板、GY-33颜色识别模块、0.96寸OLED显示屏,RGB全彩LED模块、轻触开关模块及Keil5开发环境

【IC】武汉芯源CW32L010安全低功耗MCU,树立M0+产品行业新标杆!
近日,武汉芯源半导体CW32L010系列产品正式官方发布。这款产品以其卓越的产品性能,迅速在业界引起了广泛关注,并成功树立M0+产品行业的新标杆。产品是基于eFlash的单芯片低功耗微控制器,集成了主频高达48MHz的ARM®Cortex®-M0+内核、高速嵌入式存储器(多至64K字节FLASH和多至4K字节SRAM)以及一系列全面的增强型外设和I/O口。

精雕细琢打造MCU,武汉芯源开辟属于自己的Cortex-M0+新赛道!
物联网市场如火如荼,在大量基于Cortex™-M0+的MCU已经面市的情况下,Cortex™-M0+ MCU在以这片红海中还有发展的空间吗?答案是有,近日武汉芯源半导体推出的基于Cortex™-M0+内核CW32L010新品系列就是通过差异化的细节设计开辟了属于自己的新赛道。

先楫运动控制HPM5300系列MCU助力凌思科技打造高精度 “姿态感知器” IMU
凌思科技推出的内嵌先楫半导体运动控制MCU HPM5300系列芯片的高性能惯性测量单元——LINS620,具备体积小、重量轻、抗震性及抗过载能力强的特点。LINS620内置三轴陀螺仪和三轴加速度计,稳定运行中的陀螺仪零偏为0.8°/h,加速度计零偏为20ug,用于载体的精确导航、控制和动态测量,并采用高精度MEMS惯性器件,具备高可靠性和高硬度,在恶劣环境下仍能准确测量移动载体的角速度和加速度。

CW32F030C8T6 MCU Supports an Ultra Wide Temperature Range of -40~105 ℃, Ensures Safe and Stable Operation of Portable Charging Gun
Wuhan Core Source Semiconductor‘s CW32F030C8T6 serves as the core control chip of the portable charging gun of Sihao New Energy Vehicle, indicating that CW32F030C8T6 microcontroller has been recognized by frontline host manufacturers.

【应用】基于CW32L系列MCU的指夹式血氧仪,实现更高精度测量
主控芯片建议使用CW32F003(20pin)资源足够,还便宜。CW32抗干扰性能可轻松通过ESD 8KV认证,加之优秀的ADC性能,是血氧仪类产品的不二之选

【经验】芯源CW32系列MCU电容式触摸按键设计指南
芯源半导体的CW32系列MCU电容式触摸按键设计指南向客户提供利用CW32内部资源结合软件编程实现电容式触摸按键有效触摸检测的方法。本指南内容重点在于工作原理、软件检测过程以及调试指引。通过本文可了解到如何利用内置电压比较器和内置定时器及软件配合,实现灵活方便的按键检测。在介绍标准演示板和演示软件的性能参数同时,还会给出详细的调试建议以及设计参数选择倾向分析,帮助客户快速自信地完成设计并实施调试。

M0+产品行业新标杆诞生,武汉芯源CW32L010安全低功耗MCU集合多项技术性能优势
2024年9月26日,武汉芯源半导体带着最新产品CW32L010安全低功耗MCU作客电巢直播间,举行了一场璀璨的XR技术新品发布会,此次直播,武汉芯源半导体技术总监 张亚凡、北中国区销售总监 孙秀艳与大家分享了武汉芯源半导体的发展历程和重要时刻,全面介绍和讲解了新品CW32L010实现的技术优势。

基于CW32的MAX4466放大器模块的应用实验
MAX4466是一款低噪声、高增益的放大器模块。该模块采用了集成放大器芯片,能够在低电压下提供高增益。它的输入阻抗较高,能够与多种信号源(例如麦克风、传感器)实现良好的匹配。同时,MAX4466还具备很低的噪声水平,能够有效地提取和放大微弱的信号,提高系统的灵敏度。

介绍MCU的ARM处理器——Cortex-M0+内核
ARM Cortex-M0+是2012年3月14日ARM公司发布的一款低功耗效率、能效最高的ARM处理器,可用于存在设计约束的嵌入式应用。它具有最小的硅面积和极少的代码量,从而使开发人员能够以16和8位的价位实现32位性能。处理器的低门数使其能够部署在需要简单功能的应用中。本文中武汉芯源来给大家介绍Cortex-M0+内核,希望对各位工程师有所帮助。

The Application of CW32F030 Series MCU in Electric Welding Machines
Applying a microcontroller in an electric welding machine can achieve automated control, improve welding quality and efficiency by writing specific programs. This article introduces the application of Wuhan Core Source Semiconductor CW32F030 series microcontroller in arc welding machines.

电子商城

现货市场


服务
支持微型计算机 、便携式计算机显示设备、投影仪、打印设备、绘图仪、多用途打印复印机、扫描仪、计算机内置电源、电源适配器、充电器、服务器、收款机等产品中国强制性产品认证。
提交需求>
提供7~27寸工控机定制,支持嵌⼊式/ 壁挂式 /桌⾯式/悬挂式等安装方式,采用纯平⾯板IP65防尘防⽔等级,莫⽒7级硬度触摸屏,兼容多种操作系统:组态软件/安卓/XP/win7/8/10/Linux等,支持主板、接⼝、外观、⽀架、刷卡器、⾝份证阅读器、LOGO、⻨克⻛、系统、电池、蓝⽛、4G/5G、摄像头、GPS系统、⼆维码扫描器、指纹等特殊应⽤场景定制
最小起订量: 1台 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论