The Magic Behind RTK: Delivering Unparalleled Positioning Precision


In today's advanced technological era, accurate positioning has become a cornerstone for numerous applications, ranging from agriculture to construction and beyond. But what exactly is RTK, and how does it stand out in the vast landscape of satellite navigation systems?

1 Understanding RTK (Real-Time Kinematic)
RTK, or Real-Time Kinematic, is a satellite navigation technique fundamentally crafted to enhance the precision of position data procured from satellite-based positioning systems like GPS, GLONASS, Galileo, and BeiDou.
Imagine you're on a vast open field, trying to determine your position using a conventional GPS. Typically, you might get accuracy within a few meters. Now, introduce RTK into the scene, and suddenly, you're pinpointing your location with an incredible centimeter-level accuracy! This leap in precision is achieved by RTK's unique ability to correct GPS signals, thereby setting itself leagues apart from other positioning methods.
2 RTK vs. PPK: What's the Difference?
While diving into the world of high-precision satellite navigation, you're bound to come across PPK or Post-Processed Kinematic. On the surface, RTK and PPK might seem like twin siblings, but they have distinct operational differences.
The most significant distinction lies in the timing of data correction:
RTK: As the name suggests, Real-Time Kinematic provides real-time corrections. This means that as you move and collect data, RTK is continuously refining and correcting your position, giving you immediate, high-precision results.
PPK: Post-Processed Kinematic, on the other hand, is a patient player. Instead of offering real-time corrections, PPK collects raw measurement data in the field. After your data collection session, this data is then processed and refined post-mission, giving you your high-precision results afterward.
So, when deciding between RTK and PPK, it boils down to whether you need immediate precision as you go (RTK) or if you're okay with collecting data first and achieving precision later (PPK).
3 RTK Configuration
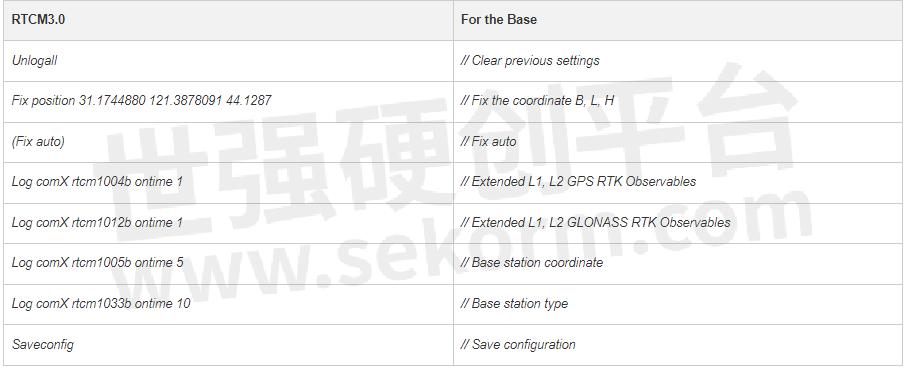
To achieve the most from RTK technology, correct configuration is imperative. The test was done using a K8 series GNSS module.Here are the recommended configuration steps based on RTCM3.0/3.2, the standardized message format for differential correction:

For the Base
Here are commands of RTCM with different formats, including RTCM3.0, RTCM3.2 MSM4, and RTCM3.2 MSM5.
If the use radio modem is for data link communication between Base and Rover, as considering limited data size can be sent per second, suggested to use of a subcontracting strategy for the base to transmit different constellations.
RTCM 3.0 includes only GPS and GLONASS, so no need to use a subcontracting strategy even using a radio data link.




For the Rover

Tip: If comX is the serial port used for configuration currently, please replace command saveconfig with interfacemode saveconfig.
Upon successful configuration, you can check the OEM board's mode with the `$GPGGA` message. If it's in RTK mode, the solution status should display as “E,4”. $GPGGA,015101.00,3121.0000551,N,12117.5483125,E,4,23,1.1,37.2598,M,0.000,M, 02,0004*58

Rover-RTK fixed
Moreover, the default setting is survey mode, and you will need to adjust to the correct dynamic mode according to your applications. For example the device used for land survey, you can use the default mode “survey”, if the device is used on robot, you will need to set the mode to “robot”. In different modes, the RTK engine treats the observation data in different styles to promote the performance of the RTK engine. The command is as below:

Conclusion
Understanding and correctly configuring RTK is paramount for professionals aiming for precise positioning. Whether you're new to this field or looking for a refresher, always remember to consult relevant manuals, and don't hesitate to explore more comprehensive resources online for in-depth insights.
- |
- +1 赞 0
- 收藏
- 评论 0
本文由翊翊所思转载自ComNav Technology Blogs,原文标题为:The Magic Behind RTK: Delivering Unparalleled Positioning Precision,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

【技术】GNSS模块/板卡数据质量快速评估方法详解:零基线法和原始数据质量分析法
随着北斗三号的全球组网以及LBS、物联网和智能驾驶的发展,GNSS模块开始向小型化、集成化方向发展,GNSS应用也从专业应用走向大众应用。对用户而言,GNSS仍具有较强的专业性,在使用中难免会遇到各类问题。本文介绍GNSS模块的快速评估方法供大家参考。

Recommend Commands for System Integration
As more and more of users integrate ComNav high precision GNSS modules into various applications, such as Robotics, UAV, Surveying and Mapping, Precision Agriculture, Automatic Driving, to improve the system‘s debuggability, it is advisable to reserve a port for communication with the internal module in ComNav‘s high precision GNSS modules. This allows users to easily view module information at a later time and access the data for analysis when needed.

How does GNSS module affect RTK performance in the field?
A GNSS receiver’s accuracy, stability and anti-interference mainly determined by a GNSS module’s various attributes such as supported signal types and quantities, speed and stability of satellite tracking, quality of original observations, positioning accuracy, etc.

司南导航(Comnav Technology)K8系列北斗/GNSS高精度定位模块选型指南
目录- 公司介绍 核心技术 K系列模块对比表 高精度模块 数传模块 北斗RDSS短报文通信模块 行业应用 服务与支持 生产与管理
型号- EVK-QD302,CRU,K8-U70,RD02,K803+U70,CDL7,K系列,QD302,K803_EK0405,EVK-K823,U703,EVK-K803,K803_EK0407,K801,K823,W803,GBAS,K802,U70,K827,K803,K823_EK0407,K807,K8系列,K823+U70,K803_EK0610

K系列OEM板用户指南
描述- 本指南为ComNav Technology K系列OEM板提供了安装、配置和操作说明。指南涵盖了OEM板的概述、评估套件、相关文档、安装指南、CRU软件配置、工作模式配置、常用命令和固件更新等内容。指南详细介绍了如何使用CRU软件进行OEM板的配置,包括状态检查、命令接口、NTRIP配置、数据记录配置和数据管理。此外,还介绍了不同工作模式的配置,如平滑模式、SBAS模式、RTK模式、RTD模式和移动基线模式。最后,指南还提供了常用命令的说明。
型号- K728,K706,K726,K803,K705,K708,K-SERIES,K823,K700,K8-SERIES

【经验】深度解析GNSS模块的冷/热启动是什么?
GNSS的基本定位原理是卫星不间断地发送自身的星历参数和时间信息,用户在接收到这些信息后,经过计算得出模块的三维位置、三维方向以及运动速度和时间信息。信号强度、芯片运算能力存在差异,将模块定位时长按快慢进行排序:热启动>温启动>冷启动。

实现毫米级实时定位,司南导航提供车规级高精度GNSS定位模块
2022年5月1日,司南导航(股票代码:833972)与世强达成合作,授权世强代理旗下全线产品,为用户提供全方位、多领域的高精度北斗芯片和高精度GNSS芯片、板卡、终端和系统解决方案。司南导航产品已全线上线平台,搜索“司南导航”即可获取更多产品资讯。

K802 GNSS模块
描述- K802是一款尺寸为22mm×17mm×2.8mm的GNSS模块,具备多系统支持、高精度定位和低功耗等特点。该模块采用ComNav的QUANTUMⅢSoC芯片,适用于专业级应用,支持GNSS+INS导航,并具备RTK定位功能。
型号- K SERIES,K802

司南导航(Comnav Technology)GNSS模块选型表
目录- GNSS模块
型号- K827,K823E,K8,K803‐U70,K9,K803_EK0405,K803 LITE‐QD302,EVK‐K823,EVK‐K803,K802S,K823‐U70,K803_EK0407,K11,K10,K801,K823,K802,K803LITE,K803,K823_EK0407,K825,K803S5,K807,K825S,K827S,K803_EK0610,K801S,K823S
K803 GNSS模块
描述- K803 GNSS模块是一款小型、高性能的定位模块,具备多系统、多频段支持,适用于多种环境下的精确定位。该模块采用ComNav的Quantum III SoC芯片,具有低功耗、高精度等特点,适用于隧道、建筑物和森林等复杂环境。
型号- K803,K SERIES

全国产单北斗系统全频点RTK定位模块K803G、K823G,具有低延迟和抗干扰等特点
K803G和K823G GNSS Module 是上海钦天导航技术有限公司基于具有完全自主知识产权的Quantum lll开发的全国产单北斗系统全频点RTK定位模块,支持BDS-2、BDS-3卫星系统信号跟踪,适用于测量测绘、机器人、地基增强等领域。
K803 GNSS Module Product Specification(K803 GNSS模块产品规范)
描述- K803 GNSS模块是一款基于自主研发SoC的高精度定位OEM模块,具备小型化、多系统和多频点的特点。它支持GPS、BDS-2、BDS-3、GLONASS、Galileo、SBAS和QZSS等多个卫星系统,主要用于对尺寸、重量和功耗有严格要求的无人机和手持设备。
型号- K803
K801 GNSS开发板
描述- K801 GNSS Development Board是一款由ComNav Technology推出的高性能、低成本GNSS定位模块,适用于厘米级和分米级高精度定位需求,适用于物联网、智能驾驶、无人机和机器人等消费市场及解决方案。
型号- K SERIES,K801

【应用】司南导航AG360北斗农机自动驾驶系统助力农机导航,定位误差不超过±2.5厘米且支持AB线共享作业
司南导航的农机导航产品,不仅操作简单、信号稳定、适配广泛,而且还提供24小时售后服务。让农业生产更加高效、节省成本,同时保证农业生产的质量和产量,为农业生产带来更多的福音。

电子商城

服务
Ignion可支持多协议、宽频段的物联网天线方案设计,协议:Wi-Fi、Bluetooth、UWB、Lora、Zigbee、2G、3G、4G、5G、CBRS、GNSS、GSM、LTE-M、NB-IoT等,频段范围:400MHz~10600MHz。
最小起订量: 2500 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论