MM32F0160的FlexCAN FD位时间采样点的计算


1、FlexCAN简介
FlexCAN模块是一个通信控制器,扩展了CAN FD功能,遵循ISO 11898-1标准、CAN FD和CAN 2.0B协议规范。CAN协议主要被设计用作车载串行总线,满足实时处理,带宽要求,车辆在电磁干扰环境下的可靠操作,该模块支持标准和扩展帧,支持最大64字节有效负载,传输速率高达8Mbps,并且具有非常灵活的用于传输和接收的邮箱系统和RxFIFO接收机制。邮箱系统由32个报文缓冲区(MB)组成。
2、FlexCAN的功能框图
FlexCAN的功能框图如下图1所示,包括用于存储报文缓冲区(MB)、接收全局掩码寄存器、接收私有掩码寄存器、接收(Rx)FIFO过滤器以及接收FIFO标识符过滤器的内存。
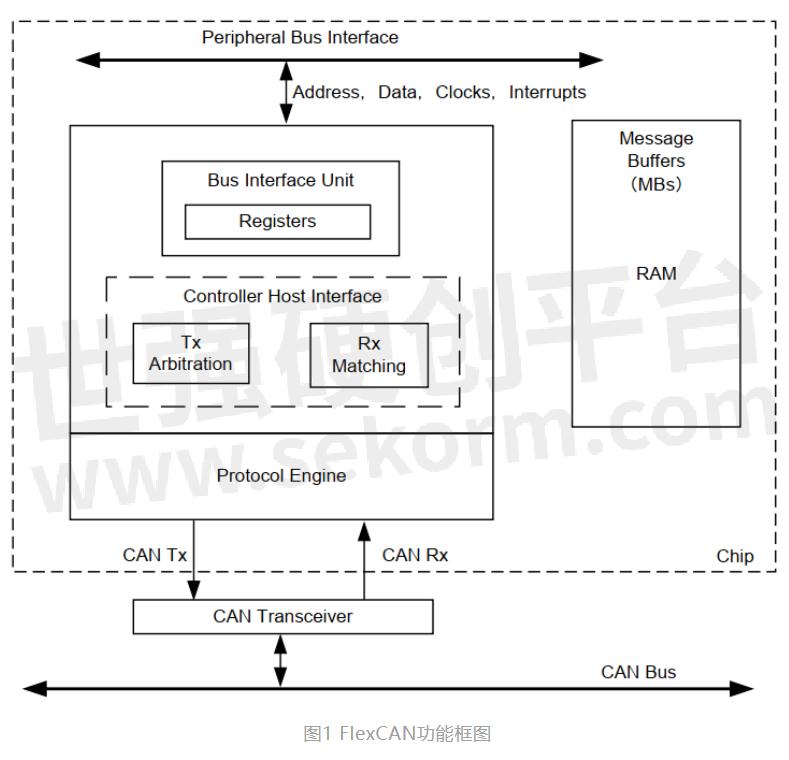
如上图1所示为FlexCAN的功能框图,协议引擎(PE)子模块管理CAN总线上的串行通信:
●请求存取RAM接收和传输帧
●验收接收到的报文
●进行错误处理
●检测CAN FD报文
控制器主机接口(CHI)子模块负责选择接收和传输的报文缓冲区,以及对报文的仲裁和ID匹配算法。
总线接口单元(BIU)子模块控制内部接口总线的访问,建立与CPU和其他模块的连接。时钟、地址和数据总线、中断输出、DMA都通过BIU进行访问。
3、FlexCAN的时钟
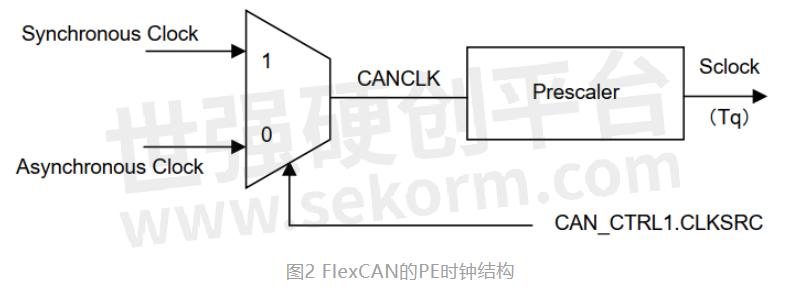
如下图2所示为产生PE时钟的电路结构。时钟源选择位(CAN_CTRL1.CLKSRC)定义了内部时钟为异步时钟或同步时钟。其中,同步时钟为外设时钟(由APB1总线时钟提供);异步时钟的时钟源可选(细节请参考RCC章节RCC_CFGR2寄存器)。为保证可靠运行,应在模块禁止模式时(CAN_MCR.MDIS置位)选择时钟源。
4、FlexCAN的协议时序
FlexCAN支持多种方式来设置CAN协议所要求的位时序参数。控制寄存器1(CAN_CTRL1)有各种用于控制位时序参数的字段:PRESDIV、PROPSEG、PSEG1、PSEG2和RJW。CAN位时序寄存器(CAN_CBT)扩展了CAN_CTRL1中CAN位时序变量的范围。CAN_FDCBT提供了用于BRS置位的CAN FD帧数据段的位时序变量。
CAN FD使能时,应始终置位CAN_CBT.BTF或CAN_CTRL2.BTE,并在CAN_CBT中配置CAN位时序变量。
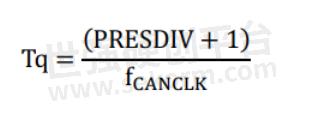
PRESDIV字段(及其扩展范围EPRESDIV和用于CAN FD报文数据段的FDPRESDIV)定义了串行时钟(Sclock)的预分频(见下列方程)。串行时钟的周期定义了用于构成CAN波形的时间单位Tq(Time Quantum)。Tq为CAN引擎所能处理的最小时间单元。
比特率定义了接收或传输 CAN 报文的速率,公式如下:

FlexCAN的位时间可细分为三个部分:
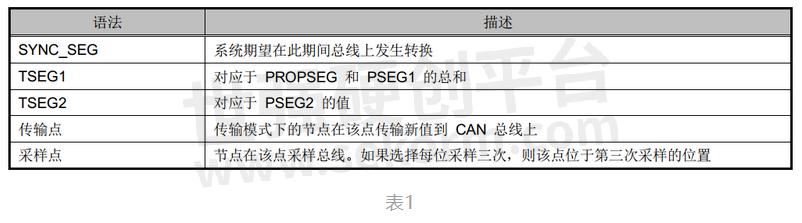
●同步段(SYNC_SEG):
1Tq的固定长度;信号边沿出现在该段内。
●时间段1:
包括CAN标准的传播段和相位段1。该段可通过设置CAN_CTRL1寄存器的PROPSEG和PSEG1字段来编程,其总和(+2)为2~16Tq。当CAN_CBT.BTF被置位时,FlexCAN使用来自CAN_CBT寄存器的EPROPSEG和EPSEG1字段,其总和(+2)为2~96Tq。对于BRS置位的CAN FD报文,FlexCAN使用CAN_FDCBT寄存器的FDPROPSEG和FDPSEG1字段,其总和为2 ~ 39Tq。
●时间段2:
CAN标准的相位段2。该段可通过设置CAN_CTRL1寄存器的PSEG2字段来编程,其值(+1)为2 ~ 8Tq。当CAN_CBT.BTF被置位时,FlexCAN使用来自CAN_CBT寄存器的EPSEG2字段,其值(+1)为2 ~ 32Tq。对于BRS置位的CAN FD报文,FlexCAN使用CAN_FDCBT寄存器的FDPSEG2字段,其值(+1)为2 ~ 8Tq。时间段2不能小于信息处理时间(IPT),IPT在FlexCAN中为2Tq。
●注意事项:
FPRESDIV定义了BRS置位的CAN FD帧数据比特率部分的PE时钟频率和串行时钟(Sclock)频率之间的比率。Sclock周期定义了CAN FD协议数据比特率的Tq。Sclock频率=PE时钟频率/(FPRESDIV+1)注:为避免处理FD帧时出错,FPRESDIV和PRESDIV(CAN_CBT或CAN_CTRL1)请使用相同的值。FPRESDIV只能在冻结模式下写入,其他模式下被硬件锁定。
如下图3所示为FlexCAN位时间内的段使用CAN_CTRL1位时序变量的经典CAN格式。
如下图4所示为FlexCAN FD位时间内的段,使用CAN FD格式的CAN_CBT和CAN_FDCBT位时序变量,其中FlexCAN FD的仲裁段使用经典CAN格式配置位时间,即使用CAN_CBT位时序变量用于配置仲裁段的位时间,FlexCAN FD的可变速率的位时间使用CAN_FDCBT位时序变量配置。
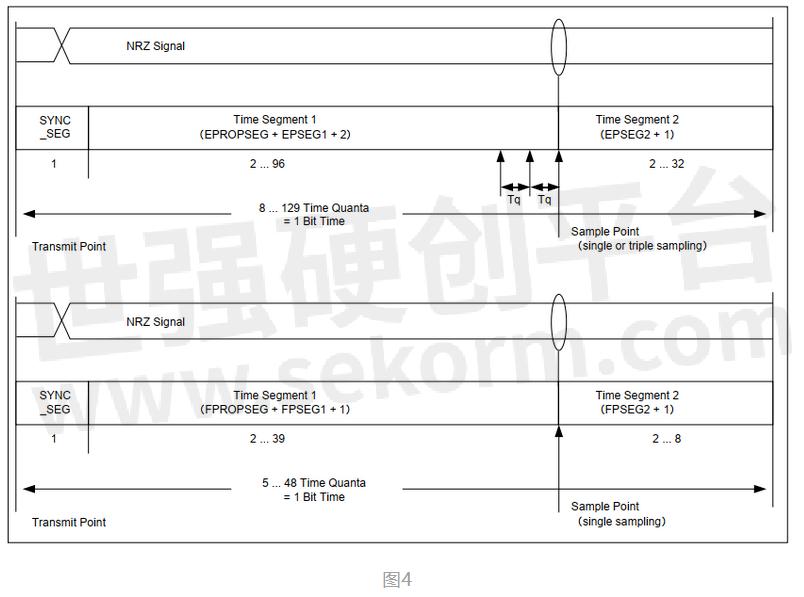
FlexCAN的语法说明如下表1所示:
当采用CAN位作为持续时间的衡量标准时(例如,评估报文中的CAN位事件),一个CAN位的外设时钟个数(NumClkBit)为:

其中:
●NumClkBit为一个CAN位的外设时钟个数
●fSYS为系统(CHI)时钟频率,单位Hz
●PSEG1为CAN_CTRL1.PSEG1的值
●PSEG2为CAN_CTRL1.PSEG2的值
●PROPSEG为CAN_CTRL1.PROPSEG的值
●PRESDIV为CAN_CTRL1.PRESDIV的值
上述公式也适用于CAN位时序寄存器(CAN_CBT)所述的CAN位时间变量。
因此,FlexCAN FD仲裁段使用经典CAN位的速率计算公式为:

FlexCAN FD可变速率数据段的计算公式为:

●fCANCLK为PE时钟,单位Hz
●BITRATEN是由CAN标称位时间变量计算出的CAN位速率,单位bps
●BITRATEF是由CAN数据位时间变量计算出的CAN位速率,单位bps
●EPSEG1为CAN_CBT.EPSEG1的值(也可使用CAN_CTRL1.PSEG1)
●EPSEG2为CAN_CBT.EPSEG2的值(也可使用CAN_CTRL1.PSEG2)
●EPROPSEG为CAN_CBT.EPROPSEG的值(也可使用CAN_CTRL1.PROPSEG)
●EPRESDIV为CAN_CBT.EPRESDIV的值(也可使用CAN_CTRL1.PRESDIV)
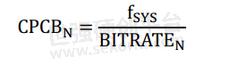
那么CANFD帧标称比特率相应的每个CAN位的外设时钟数量CPCBN为:
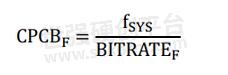
CAN FD帧数据比特率相应的每个CAN位的外设时钟数量CPCBF为:
因此在已知FlexCANFD时钟和预分频系数以及波特率的情况下可以计算出FlexCAN FD的标称位时间TqN总数和可变速率数据位时间TqF总数,计算公式分别如下所示:
fcanclk / BITRATEN x (EPRESDIV+1) = [1+(EPSEG1+1)+(EPSEG2+1)+(EPROPSEG+1)]
fcanclk / BITRATEF x (FPRESDIV+1) = [1+(FPSEG1+1)+(FPSEG2+1)+FPROPSEG]
根据以上FlexCAN FD的位时序可知可以分别根据标称位时间TqN总数和可变速率数据位时间TqF总数分别计算出其标称位时间的采样点和可变速率数据位时间的采样点,即FlexCAN FD标称位时间的采样点的计算公式为:
FlexCAN_samplepoint = (SYNC_SEG+(EPROPSEG+1) +(EPSEG1+1) )/ (SYNC_SEG+(EPROPSEG+1) +(EPSEG1+1)+ (EPSEG2+1))
FlexCAN FD可变速率位时间的采样点的计算公式为:
FlexCAN_FDsamplepoint = (SYNC_SEG+FPROPSEG+(FPSEG1+1) )/ (SYNC_SEG+FPROPSEG+(FPSEG1+1)+ (FPSEG2+1))
5、FlexCAN FD位时间采样点的计算
根据以上4章节FlexCAN的位时间描述以及FlexCAN FD位时间和采样点的计算公式推导,在给定FlexCAN FD时钟和波特率以及分频系数的情况下,可以使用FlexCAN的库函数通过循环遍历的方式实现自动计算FlexCAN FD的位时间的采样点。
FlexCAN FD库函数定义的协议时序代码如下所示:
typedef struct _flexcan_timing_config {
u16 preDivider; /*!< Clock Pre-scaler Division Factor. */
u8 rJumpwidth; /*!< Re-sync Jump Width. */
u8 phaseSeg1; /*!< Phase Segment 1. */
u8 phaseSeg2; /*!< Phase Segment 2. */
u8 propSeg; /*!< Propagation Segment. */
/*!< FlexCAN has flexible data rate. */
uint16_t fpreDivider; /*!< Fast Clock Pre-scaler Division Factor. */
uint8_t frJumpwidth; /*!< Fast Re-sync Jump Width. */
uint8_t fphaseSeg1; /*!< Fast Phase Segment 1. */
uint8_t fphaseSeg2; /*!< Fast Phase Segment 2. */
uint8_t fpropSeg; /*!< Fast Propagation Segment. */
} flexcan_timing_config_t;*/
FlexCAN FD标称位时间采样点和可变速率采样点的位时间的计算,可以通过循环遍历方式实现自动计算,代码如下所示:
bool FLEXCAN_FDCalculateImprovedTimingValues(uint32_t baudRate, uint32_t baudRateFD, uint32_t sourceClock_Hz, flexcan_timing_config_t *pTimingConfig)
{
bool fgRet = false;
pTimingConfig->preDivider = 0U;
pTimingConfig->fpreDivider = 0U;
if(FLEXCAN_CalculateImprovedTimingValuesByFDCBT(baudRateFD, sourceClock_Hz, pTimingConfig))
{
if(FLEXCAN_CalculateImprovedTimingValuesByCBT(baudRate, sourceClock_Hz, pTimingConfig))
{
fgRet = true;
}
}
return (fgRet);
}
static bool FLEXCAN_CalculateImprovedTimingValuesByFDCBT(uint32_t baudRate, uint32_t sourceClock_Hz, flexcan_timing_config_t *pTimingConfig)
{
uint32_t clk; /* the clock is tqNumb x baudRateFD. */
uint32_t tqNum; /* Numbers of TQ. */
bool fgRet = false;
tqNum = FDCBT_MAX_TIME_QUANTA;
/* Auto Improved Protocal timing. */
do
{
clk = baudRate * tqNum;
if (clk > sourceClock_Hz)
{
continue; /* tqNum too large, clk has been exceed sourceClock_Hz. */
}
if ((sourceClock_Hz / clk * clk) != sourceClock_Hz)
{
continue; /* Non-supporting: the frequency of clock source is not divisible by target baud rate, the user
should change a divisible baud rate. */
}
/* Make sure the new calculated divider value is greater than the previous one. */
if (pTimingConfig->fpreDivider > ((uint16_t)(sourceClock_Hz / clk) - 1U))
{
continue;
}
else
{
pTimingConfig->fpreDivider = (uint16_t)(sourceClock_Hz / clk) - 1U;
}
if (pTimingConfig->fpreDivider > MAX_FPRESDIV)
{
break; /* The frequency of source clock is too large or the baud rate is too small, the pre-divider could
not handle it. */
}
/* Try to get the best timing configuration. */
if (FLEXCAN_FDGetSegmentswithBRS(baudRate, tqNum, pTimingConfig))
{
fgRet = true;
break;
}
}
while(--tqNum >= FDCBT_MIN_TIME_QUANTA);
return (fgRet);
}
static bool FLEXCAN_FDGetSegmentswithBRS(uint32_t baudRatebrs, uint32_t tqNum, flexcan_timing_config_t *pTimingConfig)
{
uint32_t ideal_sp;
uint32_t p1;
bool fgRet = false;
/* get ideal sample point. */
if (baudRatebrs >= 1000000U)
{
ideal_sp = IDEAL_SP_LOW;
}
else if (baudRatebrs >= 800000U)
{
ideal_sp = IDEAL_SP_MID;
}
else
{
ideal_sp = IDEAL_SP_HIGH;
}
/* distribute time quanta. */
p1 = tqNum * (uint32_t)ideal_sp;
pTimingConfig->fpropSeg = (uint8_t)(p1 / (uint32_t)IDEAL_SP_FACTOR - 2U);
if (pTimingConfig->fpropSeg <= (MAX_FPSEG1 + MAX_FPROPSEG))
{
if (pTimingConfig->fpropSeg > MAX_FPROPSEG)
{
pTimingConfig->fphaseSeg1 = pTimingConfig->fpropSeg - MAX_FPROPSEG;
pTimingConfig->fpropSeg = MAX_FPROPSEG;
}
else
{
pTimingConfig->fphaseSeg1 = 0;
}
if(pTimingConfig->fphaseSeg1 <= MAX_PSEG1)
{
if ((pTimingConfig->fpropSeg + pTimingConfig->fphaseSeg1) < ((uint8_t)tqNum - 3U))
{
pTimingConfig->fphaseSeg2 = (uint8_t)tqNum - (pTimingConfig->fphaseSeg1 + pTimingConfig->fpropSeg + 3U);
if (pTimingConfig->fphaseSeg2 <= MAX_PSEG2)
{
if ((pTimingConfig->fphaseSeg1 < pTimingConfig->fphaseSeg2) && (pTimingConfig->fpropSeg > (pTimingConfig->fphaseSeg2 - pTimingConfig->fphaseSeg1)))
{
pTimingConfig->fpropSeg -= (pTimingConfig->fphaseSeg2 - pTimingConfig->fphaseSeg1);
pTimingConfig->fphaseSeg1 = pTimingConfig->fphaseSeg2;
}
/* subtract one TQ for sync seg. */
/* sjw is 20% of total TQ, rounded to nearest int. */
pTimingConfig->frJumpwidth = ((uint8_t)tqNum + 4U) / 5U - 1U;
if (pTimingConfig->frJumpwidth > MAX_FRJW)
{
pTimingConfig->frJumpwidth = MAX_FRJW;
}
fgRet = true;
}
}
}
}
return (fgRet);
}
static bool FLEXCAN_CalculateImprovedTimingValuesByCBT(uint32_t baudRate, uint32_t sourceClock_Hz, flexcan_timing_config_t *pTimingConfig)
{
uint32_t clk; /* the clock is tqNumb x baudRateFD. */
uint32_t tqNum; /* Numbers of TQ. */
bool fgRet = false;
tqNum = CBT_MAX_TIME_QUANTA;
/* Auto Improved Protocal timing. */
do
{
clk = baudRate * tqNum;
if (clk > sourceClock_Hz)
{
continue; /* tqNum too large, clk has been exceed sourceClock_Hz. */
}
if ((sourceClock_Hz / clk * clk) != sourceClock_Hz)
{
continue; /* Non-supporting: the frequency of clock source is not divisible by target baud rate, the user
should change a divisible baud rate. */
}
/* Make sure the new calculated divider value is greater than the previous one. */
if (pTimingConfig->preDivider > ((uint16_t)(sourceClock_Hz / clk) - 1U))
{
continue;
}
else
{
pTimingConfig->preDivider = (uint16_t)(sourceClock_Hz / clk) - 1U;
}
/* To minimize errors when processing FD frames, try to calculate the same value for FPRESDIV and PRESDIV (in CBT). */
if (pTimingConfig->preDivider != pTimingConfig->fpreDivider)
{
continue;
}
if (pTimingConfig->preDivider > MAX_EPRESDIV)
{
break; /* The frequency of source clock is too large or the baud rate is too small, the pre-divider could
not handle it. */
}
/* Try to get the best timing configuration. */
if (FLEXCAN_FDGetSegments(baudRate, tqNum, pTimingConfig))
{
fgRet = true;
break;
}
}
while(--tqNum >= CBT_MIN_TIME_QUANTA);
return (fgRet);
}
FlexCAN FD位时间采样点应用举例,本文示例以MM32F0160的FlexCAN FD外设为例,其中FlexCAN FD的标称波特率为500K,可变速率波特率为2MHz。fCAN的时钟为72MHz,把FlexCAN FD的fCAN时钟,标称波特率500K,可变速率波特率2MHz代入库函数FLEXCAN_FDCalculateImprovedTimingValues分别计算得出FlexCAN FD标称波特率和可变速率波特率的位时间参数如下:
标称波特率的位时间参数:
preDivider = 0x01;
propSeg = 0x34;
phaseSeg1 = 0x08;
phaseSeg2 = 0x08;
rJumpwidth = 0x0E
可变速率波特率位时间参数:
fpreDivider = 0x01;
fpropSeg = 0x07;
fphaseSeg1 = 0x04;
fphaseSeg2 = 0x04;
frJumpwidth = 0x03
注:再同步参数rJumpwidth 和frJumpwidth不参与FlexCANFD采样点的计算
又因为在已知FlexCAN FD时钟和预分频系数,以及波特率的情况下可以计算出FlexCAN FD的标称位时间TqN总数和可变速率数据位时间TqF总数,计算公式分别如下所示:
标称位时间TqN总数:
fcanclk / BITRATEN x (EPRESDIV+1) = [1+(EPSEG1+1)+(EPSEG2+1)+(EPROPSEG+1)]
代入自动计算得出的标称波特率500K的位时间参数,计算出TqN:
TqN = 72000000/500000x(1+1) = 72
可变速率数据位时间TqF总数:
fcanclk / BITRATEF x (FPRESDIV+1) = [1+(FPSEG1+1)+(FPSEG2+1)+FPROPSEG]
代入自动计算得出的可变波特率2MHz的位时间参数,计算出TqF:
TqF = 72000000/2000000x(1+1) = 18
根据以上FlexCAN FD使用库自动计算出的位时间参数,以及标称位时间TqN总数和可变速率位时间TqF总数,可以分别计算出其标称位时间的采样点和可变速率数据位时间的采样点,即FlexCAN FD标称位时间的采样点的计算公式为:
FlexCAN_samplepoint = (SYNC_SEG+(EPROPSEG+1) +(EPSEG1+1) )/ (SYNC_SEG+(EPROPSEG+1) +(EPSEG1+1)+ (EPSEG2+1))
代入标称波特率500K的位时间参数计算标称波特率的位时间的采样点如下:
FlexCAN_samplepoint =(1+(52+1)+(8+1))/(1+(52+1)+(8+1)+(8+1))= 87.5%
FlexCAN FD可变速率位时间的采样点的计算公式为:
FlexCAN_FDsamplepoint = (SYNC_SEG+FPROPSEG+(FPSEG1+1) )/ (SYNC_SEG+FPROPSEG+(FPSEG1+1)+ (FPSEG2+1))
代入可变速率2MHz波特率的位时间参数计算可变速率的位时间的采样点如下:
FlexCAN_FDsamplepoint = (1+7+(4+1))/(1+7+(4+1)+(4+1))= 72%
CAN采样点一般设置在75%—80%之间,具体要根据CAN通信波特率大小配置。当波特率不超过500K时,建议采样点设置在87.5%;当波特率大小在500K—800K之间的时候,建议采样点设置在80%;当波特率大于800K的时候,建议采样点设置在75%。以上建议并不是绝对的,需根据应用环境复杂程度通过调整FlexCAN FD的再同步参数rJumpwidth和frJumpwidth使得phaseSeg1和phaseSeg2以及fphaseSeg1和fphaseSeg2在标称波特率和可变波特率的位时间上前移或后移N(0-15)个Tq值来微调采样点(虽然rJumpwidth和frJumpwidth不参与采样点计算)。
注意事项:
关于采样点的配置的一些额外建议:当用户在实际车用环境中出现FlexCAN无正常收发数据时除了根据错误标志查找问题定位问题外,还可使用专业的CAN诊断仪测试出多节点总线上的rJumpwidth和frJumpwidth,phaseSeg1和phaseSeg2以及fphaseSeg1和fphaseSeg2参数,参考这些位时间参数值来调整适配rJumpwidth和frJumpwidth,phaseSeg1和phaseSeg2以及fphaseSeg1和fphaseSeg2参数到CAN通信的合适的采样点。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由咪猫转载自MindMotion(灵动MM32MCU公众号),原文标题为:灵动微课堂 (第277讲)|MM32F0160的FlexCAN FD位时间采样点的计算,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

Keil分散加载文件浅析
分散加载文件(scatter file)是一个文本文件,用于描述 ARM 链接器生成映像文件所需要的信息,在一些应用场景中嵌入式系统可能会使用分散加载。本章节简要介绍了分散加载文件的基本概念和语法,旨在对分散加载文件有初步认识。

灵动微电子MM32F0160系列MCU FlexCAN-FD通信应用指南
MM32F0160系列MCU具有一个 FlexCAN 模块,该模块遵循 ISO 11898-1 标准、 CAN FD 和 CAN 2.0B 协议规范,不仅兼容传统CAN,还支持CAN FD模式。本章节初步学习使用MM32F0160 FlexCAN-FD接口实现CAN FD通信,相关例程参考灵动官网的LibSamples或在此基础上修改。

使用灵动MM32F5270 MCU UART配置实现LIN通信
本文主要简述MM32F5270 UART是如何实现LIN通信的。从LIN驱动程序、 主机程序、从机程序和验证等方面来讲代码实现。

灵动凭借MM32SPIN0230/080G/060G电机控制MCU获“最佳电机控制器解决方案供应商”荣誉
2024年11月21日,在2024电机控制先进技术研讨会(秋季),“2024第五届电机控制技术市场表现奖”年度评选活动上,MindMotion灵动凭借多年在电机控制领域的优秀表现,荣获“最佳电机控制器解决方案供应商”奖,该奖项旨在通过业界共同推荐、评选出电机控制行业内市场表现优秀,具有技术和创新能力的企业。

MindMotion(灵动微)MM32系列32位MCU选型指南
目录- 公司介绍及产品应用领域 第二代M0产品 G系列产品 / 第二代M3产品 / 第二代M33产品 / 第二代电机专用MCU 第二代电机SOC产品 / AEC-Q100 / 第二代低功耗产品 第一代M0产品 第一代M3产品 / 第一代M33产品 / 第一代电机专用MCU / 第一代电机SOC产品 / 第一代低功耗产品
型号- MM32G0163D4PV,MM32L0XX,MM32F0144C6PM,MM32F5230,MM32SPIN580C,MM32G0020,MM32G0140,MM32L073PF,MM32F0133C4Q,MM32SPIN080GN,MM32SPIN560CM,MM32SPIN023C,MM32F0133C4P,MM32F5287L8PV,MM32SPIN533AM,MM32F0162D7P,MM32F0121C6P,MM32SPIN0230,MM32F0163D4Q,MM32SPIN080C,MM32F0141C1T,MM32L062NT,MM32F0020B1N,MM32F0144C1TV,MM32F5330,MM32G0001,MM32G0120,MM32F0144C1TM,MM32F0163D7P,MM32SPIN030CN,MM32G0121C1TV,MM32SPIN07PF,MM32F0010A1TV,MM32SPIN05PFOP,MM32SPIN0230B1TV,MM32SPIN37PSD,MM32G0001A6T,MM32F3270,MM32F0121C4P,MM32F5277E9PV,MM32F5287L9PV,MM32F0121C4Q,MM32F5333D6PV,MM32SPIN0280DAPV,MM32F0163D6P,MM32F0121C4N,MM32SPIN080G,MM32F0144C4PM,MM32SPIN560,MM32F0144C4PV,MM32F5280,MM32SPIN06NT,MM32F0140,MM32SPIN560C,MM32F0020,MM32G5333D6QV,MM32F0162D4Q,MM32F0273D6P,MM32F0050C1TV,MM32SPIN0230B3NV,MM32SPIN06PF,MM32G0144C4QV,MM32SPIN0280,MM32L052NT,MM32F5270,MM32F0144C4P,MM32F5277E8PV,MM32F031C6T6,MM32F0130,MM32F0010,MM32F0020B1TV,MM32F5333D7PV,MM32G0144C4PV,MM32SPIN080CN,MM32F0144C4Q,MM32SPIN060G,MM32L0136C7P,MM32F0133C7P,MM32SPIN05NW,MM32F5331D3NV,MM32SPIN05NT,MM32F0040B1T,MM32G0001A6T1V,MM32SPIN06PT,MM32F0120,MM32F0162D6P,MM32F5331D3NM,MM32F003NW,MM32G0160,MM32SPIN27NF,MM32F0163D4QM,MM32SPIN05PF,MM32F031,MM32F3273G6P,MM32F0163D4QV,MM32L0136B6P,MM32G0001A1TV,MM32F0133C6P,MM32SPIN0280D7PV,MM32F5277E7PV,MM32F0144C6P,MM32SPIN222C,MM32F0144C6PV,MM32F0010A6T,MM32G0001A1T,MM32F3273G7P,MM32L0130,MM32G0001A1N,MM32SPIN05PT,MM32G0121C4PV,MM32F0010A1T,MM32F5233D7PV,MM32SPIN27PF,MM32F0010A1N,MM32G5330,MM32SPINEBK,MM32SPIN07,MM32F3273G8P,MM32SPIN160C,MM32SPIN06,MM32SPIN0230B1NV,MM32L0136C6P,MM32SPIN05,MM32F0040B1N,MM32L0020,MM32F0050,MM32SPIN0280D6PV,MM32SPIN533,MM32F031K6U6,MM32F3273G9P,MM32F0163D6PM,MM32SPIN040C,MM32G0020B1T,MM32F003,MM32SPIN37,MM32F0163D6PV,MM32G0020B1N,MM32F0273D8P,MM32F0160,MM32L0136C3T,MM32F0040,MM32G0001A1NV,MM32SPIN0280D6QV,MM32F0144C1T,MM32F103CBT6,MM32F5233D6PV,MM32F0144C4QM,MM32F3273E6P,MM32SPIN27PQ,MM32SPIN27PS,MM32SPIN27PT,MM32L0136C4N,MM32SPIN27,MM32F0020B1NV,MM32F0270,MM32G0121C4QV,MM32F031F6U6,MM32F0273D7P,MM32F003TW,MM32G0144C1TV,MM32F3273E7P,MM32G0163D6PV,MM32F0163D7PM,MM32F0141B1T,MM32SPIN030C,MM32F0163D7PV,MM32F0131C7P,MM32F103,MM32SPIN05TW,MM32F031Y6Y6,MM32F0141C4P,MM32F0141C4Q,MM32F0141C4N,MM32F031K6T6,MM32F0010A1NV,MM32F0131C6P,MM32SPIN422C,MM32SPIN0280D4PV,MM32F0020B1T,MM32L0020B1T,MM32F103RBT6,MM32L0020B1N,MM32F031F6P6,MM32F0121C1N,MM32F0050C1NV,MM32F5333D4QM,MM32G0001A6TV,MM32SPIN360C,MM32,MM32F5333D4QV,MM32F0141C6P,MM32F0141B4P,MM32F0131C4P,MM32F0131C4Q,MM32SPIN0230B3TV,MM32SPIN533A,MM32SPIN033A,MM32F5287L7PV,MM32F5233D4QV

MindMotion MM32H5480 Triumphs with “2024 Hardcore MCU Chip Award“
MindMotion Microelectronics, as a frontrunner in the domestic market for general-purpose 32-bit MCU products and solutions, proudly secured the “2024 Hardcore MCU Chip Award“ for its high-performance product, the MM32H5480.

HVAC FLAP以MM32SPIN023C为主控设计提供All in one方案
暖通空调 (HVAC) 系统旨在调节、加热、冷却、通风、清洁或除湿车厢内的空气质量 (IAQ)。暖通空调系统由前端的传感器和机械/电子开关、鼓风机电机、执行器(用于新鲜空气循环控制、气流控制和温度控制)以及制冷装置组成,这些装置将空气输送到后端的座舱,以确保驾驶员和乘客的热舒适性。HVAC FLAP以 MM32SPIN023C 为主控。

【IC】灵动新推出32位MCU MM32F0120,主频高达72MHz,提供64KB Flash和8KB RAM
灵动微电子发布的MM32F0120,搭载Cortex M0内核,主频高达72MHz,提供64KB Flash和8KB RAM,最高支持48pin封装。适用于屏显控制、电动玩具、电源管理、马达控制、无线快充等多种应用场合。

【IC】“灵动·星”系列MM32高性能MCU产品搭载Star-MC1提供强劲内核动力,性能提升20%
“灵动·星”系列 MM32 高性能 MCU 产品,搭载安谋科技(Arm China)Star-MC1 内核性能,其1.5 DMIPS / MHz,提升 20% ,4.02 CoreMark / MHz,提升20% 。目前包含 4 个子系列: MM32F3,灵动·天枢 MM32F5,灵动·玉衡 MM32G5,灵动·天玑 MM32H5,为用户提供灵活、丰富的选择。


【IC】灵动发布全新入门级32位MCU MM32G0001系列,内置时钟全温度范围内偏差不超过±2%
灵动股份推出全新超值型MM32G0001系列MCU。2023年初,灵动首次发布了其主打高性价比的MM32G系列,目前已陆续推出了G0140,G0160和G5330系列产品。为进一步丰富MM32G系列产品组合,灵动和上下游合作伙伴通力合作,打造出全新入门级超值型MM32G0001系列MCU。

【IC】灵动微电子高性能通用32位MCU产品MM32H5480荣获“2024年度硬核MCU芯片奖”
近日,第六届硬核芯生态大会在深圳举办,同期2024年度硬核中国芯获奖榜单正式发布。作为国内领先的本土通用32位MCU产品及解决方案供应商,MindMotion灵动微电子凭借高性能产品MM32H5480斩获“2024年度硬核MCU芯片奖”。

【经验】灵动MindSDK搭建Keil MDK开发环境指南
本文介绍基于Windows操作系统构建嵌入式系统开发环境过程中需要使用的主要软件Keil MDK,并对一些需要特别关注的要点重点说明。Keil MDK是灵动官方的软件开发平台MindSDK支持的主要编译工具之一。

【经验】基于MM32F0163D7P的USB Audio Class(UAC)音频设备移植教程
在上一节我们在MM32F0163D7P 平台上成功的移植了TinyUSB,基于这个平台,今天我们来实现一个 uac2_headset 音频设备,这个设备支持基础的录音和放音功能,如果要支持音量调节/静音功能,还需要再添加一个 HID 变成复合设备。

灵动微电子扎根张江造“芯”,打造本土32位MCU知名品牌
灵动微电子成立于2011年,2016年进军MCU市场,2019年积极向工业、大家电、汽车等领域发力,目前已涵盖消费电子、电机与电源、家电、汽车、计算机与通信、工业控制等应用领域,客户群体包括飞利浦、小米、汇川、海尔、海信、美的等,是中国本土领先的通用32位MCU 产品及解决方案供应商。

电子商城

现货市场


服务
可定制显示屏的尺寸0.96”~15.6”,分辨率80*160~3840*2160,TN/IPS视角,支持RGB、MCU、SPI、MIPI、LVDS、HDMI接口,配套定制玻璃、背光、FPCA/PCBA。
最小起订量: 1000 提交需求>
可烧录IC封装SOP/MSOP/SSOP/TSOP/TSSOP/PLCC/QFP/QFN/MLP/MLF/BGA/CSP/SOT/DFN;IC包装Tray/Tube/Tape;IC厂商不限,交期1-3天。支持IC测试(FT/SLT),管装、托盘装、卷带装包装转换,IC打印标记加工。
最小起订量: 1pcs 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论