是德科技浅谈抖动测试方法

“抖动”一词是否让您感到担忧?虽然在设计中总是会出现抖动,但若是能够查明抖动的原因和源头,就能为您的系统设计和调试带来信心。
从本质上讲,抖动是将信号的实际边缘与您希望它所在的位置进行对比。如果信号的边缘太远,它会导致系统出错。“总体抖动”可以分解成多个分量,每个由不同的原因造成,代表设计中的不同问题。在高速系统的设计和调试中,必不可少地要了解不同的抖动分量和关键的分析技巧(解释眼图)。
抖动属随机噪声。对于大多数可重复和一致性的测量,要使用有效值,而不是峰峰值的统计测量。用峰峰值和有效值的关系评估抖动分布特性。
什么是抖动?
抖动的定义:“信号的某特定时刻相对于其理想时间位置上的短期偏离为抖动”
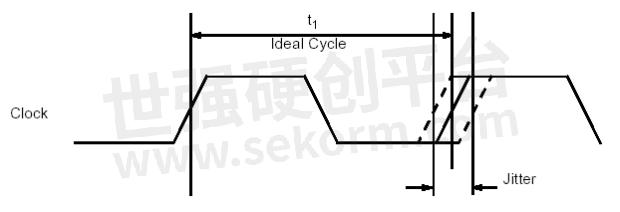
简单来说,抖动是指相对于其应当发生跳变的时间,信号实际跳变时有多长时间的提前或延迟。对于数字信号而言,这个有效瞬时就是信号的跳变点(或交叉点)。这取决于时间参考是来自于采样数据,还是由外部提供。如果抖动发生在采样点跳变阈值的“错误位置”,并且导致接收电路“错解”了该比特位发射时的真实情况,那么就会出现传输误差。图1就是对这种情形的描述。
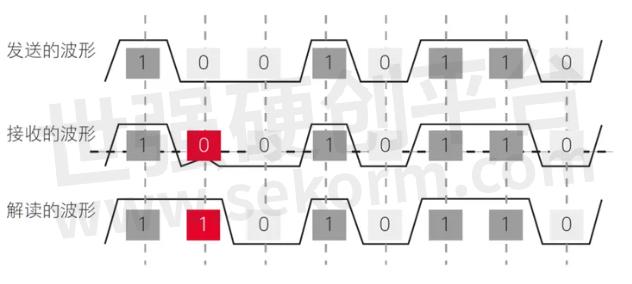
图1. 抖动会导致接收机错误地解读被传输的数字数据。
正如本文所述,工程师如能了解抖动的类型及成因,熟悉器件特性和各类抖动测试优势,便可轻松地确认抖动的根源,从而有效地消除抖动对电路和产品的影响。
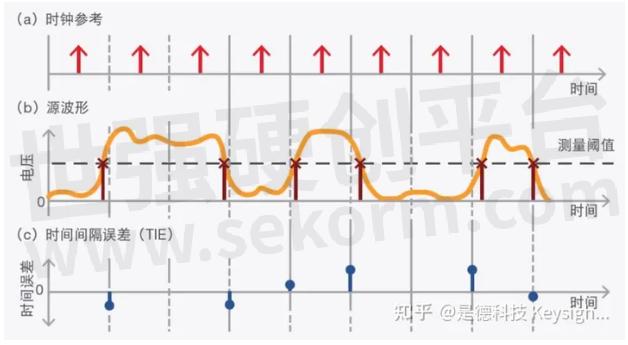
图2
抖动是在边沿上发生的噪声和相位变化,它们会导致信号时序错误。举个简单的例子,考虑一个基本的数据信号(图2中的橙色迹线)。为了分析串行数据应用中使用的嵌入式器件,要从输入的数据流中提取出参考时钟,并与接收机的输入信号结合使用来重建数据。参考时钟在时钟恢复电路中产生,它使接收机可以在本质上“查看”理想间隔的时间点。它可以看到信道在每个点上的电压。根据从这个过程中解释出来的内容,它可以重建数据流,该数据流最终应与发射机发送的数据流完全一致。
但是,如果信号中出现了大量抖动,就会出现问题。如果接收信号中的很多比特位含有大量抖动,那么它们将无法正确地与参考时钟同步。这意味着接收机最终可能在每个时钟周期中收到错误的比特,因此会错误地解码数据。
图2中绿色迹线上的红色“x”游标表示信号有抖动时发生的时序误差。请注意,在某些情况下,上升沿或下降边会出现得太快或太晚。这可以在使用余辉显示模式的示波器上看到(见图3)。如果上升沿出现得太晚,那么接收机会错误解释该比特。边沿交叉点实际发生的时间与理想情况下应发生的时间之差称为时间间隔误差(TIE)。
边沿交叉点实际发生的时间与理想情况下应发生的时间之差称为时间间隔误差(TIE)。
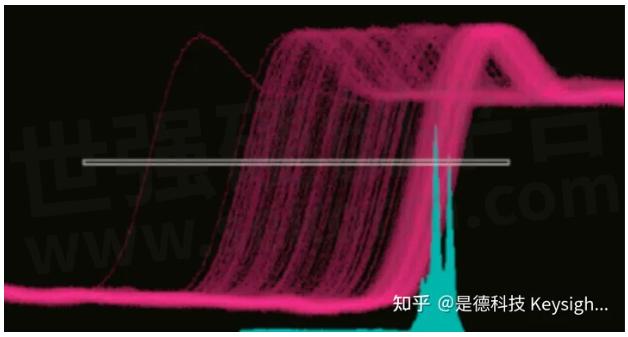
图3. 使用余辉显示模式显示信号,您会看到时序上出现微小误差(称为TIE)。
为什么要关注抖动?-抖动影响了数字系统的性能和可靠性
在同步系统如SDH,传输时钟抖动影响子系统的同步,过大的抖动直接造成误码,或减低了信号的消光比ER(等同电信号的信噪比SNR)。所以ITU-T,Bellcore,ANSI都制定模板Mask来检定眼图是否拥有过大的抖动,以及测量传输时钟抖动漂移。
传统的并行式数据通信,即多通道数据与时钟分别传送,往往因为PCB阻抗不匹配,传输路径不一致而产生建立与保持时间违反。当速度增加的时候,准确控制传输时延显得异常的困难,今天新颖的数据通信都已经是串行了,不单只使用一对差分线来传送数据,以减低信号EMI的干扰,更往往将时钟嵌入在数据中,而接收端则使用CDR从数据中恢复时钟出来。所以,若数据的抖动过大,频率过高,接收端的CDR将无法恢复时钟而导致误码。所以需要控制系统的时钟与输出的数据抖动。
抖动直接减小了逻辑数字系统的建立保持时间的余量,严重的影响逻辑运作。
正如我们之前提到的,如果您的信号未与参考时钟同步并且抖动超出了容限值,接收机最终将错误地解释该比特。举一个简单的例子,请参见图4中的情况。发送的数据是二进制的100。但是,在接收到的波形中存在一些抖动,这导致第二个比特在接收机中显示为1,而实际上发送的比特为0。因此,接收机解码得到的结果为110。
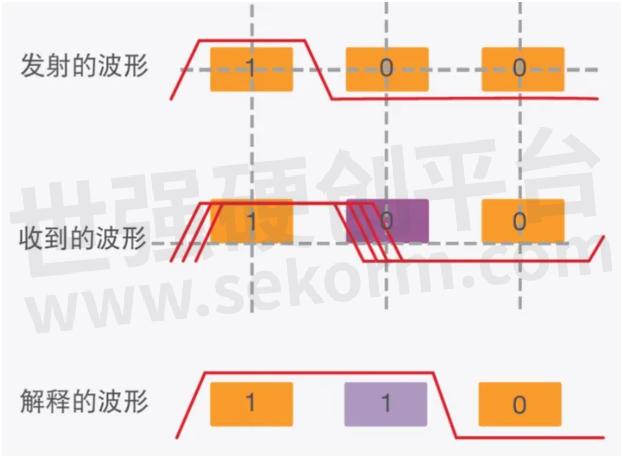
图4. 接收机错误地解释了含有抖动的发送脉冲。
我们以无人机为例。假设图中顶部的串行数据包命令无人机飞回基地。然而,由于有抖动,接收机错误地解释了比特,解码得到的命令要求无人机向东飞行。您的宝贵设计最终可能会飞过窗户而不是降落在指定位置。出现这样的错误会让您的设计无法获得批准,也就无法进入开发工作的下一个阶段。
无论您的设计有多好,接收到的信号中总会有一定数量的比特出错。错误比特的数量与发送比特的总数之比称为比特误码率(BER)。显然您希望这个数字尽可能低,而且一定要低于特定标准规定的目标;例如,USB 3.0规定的比特误码率为1E-12。要限制BER,您必须了解导致这些误码的各种抖动。
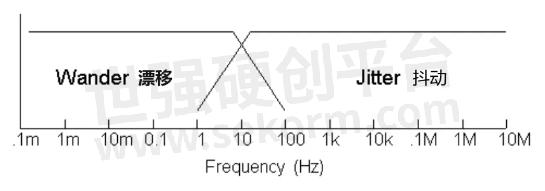
抖动和漂移的区别是什么?
快过10Hz的偏离为:抖动Jitter
慢过10Hz的偏离为:漂移Wander
参考:ITU-T Recommendation G.810 (08/96) “Definitions and Terminology for Synchronization Networks”
抖动vs相位噪声vs频率噪声
假设:W(t)=W(2pfdt+j(t))
W(t)=带有相位调制的波形函数
fd=波形函数的频率
j(t)=相位调制函数
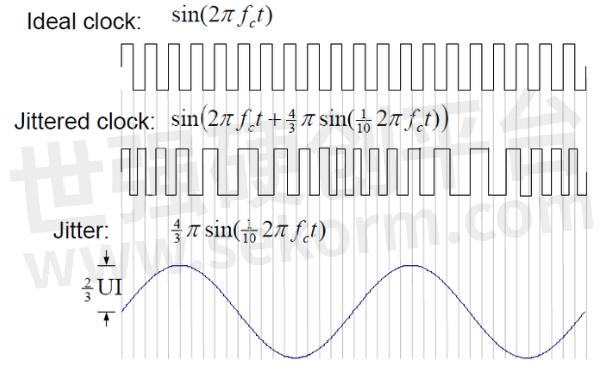
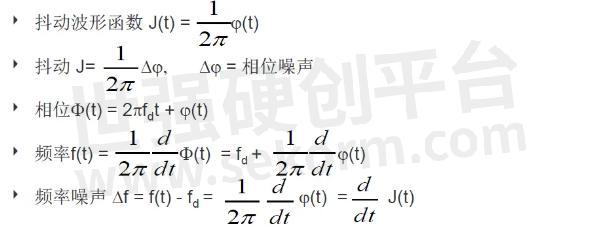
所以抖动的变化与相位的变化成正比,而抖动的变化率在频谱上以频率噪声的方式显现出来。
抖动源
信号上的抖动会因各种原因而呈现出不同的特点。因此,对抖动源进行分类至关重要。
下面列出了容易引起抖动的主要情形:
系统情况
这是数字系统本身在模拟环境下的特性对信号造成的影响。与系统相关的抖动源包括:
–辐射信号或传导信号之间的串扰
–散射效应
–阻抗失配
数据相关现象
传输数据的码型或其他特性会对到达接收机位置的净抖动(net jitter)造成影响。与数据相关的抖动源包括:
–码间干扰
–占空比失真
–伪随机、比特序列周期性
随机噪声现象
这里指的是,系统中随机引入的噪声会导致抖动现象的发生。此类抖动源包括:
–热噪声—即kTB噪声。它与导体中的电子流紧密相关,并且会随着带宽、温度和噪声电阻的增加而增加。
–散粒噪声—半导体中的电子噪声和孔噪声(hole noise),此类噪声的幅度取决于偏置电流和测量带宽。
–“粉红”噪声—频谱与1/f相关的噪声
上述现象在所有的半导体和元器件中都会发生,因此在锁相环设计、振荡器的拓扑结构和设计及晶体材料性能测试时都会遇到。
有界和无界抖动源
抖动源通常分为两类:“有界”和“无界”。
有界抖动源
有界抖动源会在可识别的时间间隔内达到最大和最小的相位偏差值。这类抖动也叫“确定性抖动”;它们是由系统和与数据相关的(前述的第一组和第二组)抖动源而引发的。
无界抖动源
无界抖动源在任何时间间隔内都不会出现最大或最小的相位偏差,而且至少理论上,它们的抖动幅度会趋于无穷大。这类抖动也会被归类为“随机抖动”。它们会因为随机噪声源(上述第三组抖动源)而引发。
信号的总体抖动可以用相位误差函数φj(t)来表示。它是“确定性抖动分量”和“随机抖动分量”的总和,这二者都会影响信号质量:
其中
代表“确定性抖动分量”,采用峰峰值(JppD)进行量化。它通过把确定性/有界抖动源产生的相位(或时间)上的最大提前量和最大延迟量相加而得到。而
代表“随机抖动分量”,采用标准偏差值(JrmsR)进行量化。它是所有会影响信号质量的随机噪声源的总和。由于我们是假设随机抖动呈现高斯分布,并用高斯分布的平均值和标准方差来定义随机抖动。若要确定随机噪声源产生的抖动,必须确定和评估代表这种随机抖动的高斯函数和它的标准方差。
简要介绍过抖动之后,我们再了解一些其他抖动测试和查看抖动的方式。抖动会对系统或器件造成不良影响;每种抖动测试方法对于深入了解抖动属性,都有其各自的优势。如能站在全局高度对这些要点加以“整合”,我们就可以透彻地了解抖动,轻松找到抖动根源,并且灵活地选择减少或消除抖动的方式。
常规的抖动测试方法包括相邻周期间抖动、周期性抖动和时间间隔误差(TIE)。相邻周期间抖动通常测得为峰峰值,它是相邻时钟周期的最大差值。周期性抖动通常也测得为峰峰值,它是指定时间量之内最长和最短时钟周期之间的差值。TIE通常测得为RMS值,它是理想时钟周期与实际时钟周期之间的差值。
抖动可能有界,也可能无界。有界抖动具有确定的最大值和最小值,而无界抖动没有上限或下限。
最后,许多人会谈到“抖动预算”。抖动预算是系统中容许的抖动量。通常这是在项目开始时定义的设计技术指标。
抖动分量
谈到系统的总体抖动时,我们使用“总体抖动”(TJ-Total Jitter)一词。总体抖动由“随机抖动”(RJ-Random Jitter)和“确定性抖动”(DJ-Deterministic Jitter)组成。
从理论上讲,随机抖动(RJ)是无界的,通常以RMS有效值来衡量。“无界”是指如果您等待足够长的时间,并持续收集TIE测量数据,那么理论上峰峰值抖动将无限增长。但是随机抖动的RMS有效值最终将变为一个稳定值。另外,随机抖动的分布是很容易预测的。概率分布函数(PDF)始终为高斯分布(钟形曲线)。当前许多高速总线和接口标准都要求除了测量总体抖动之外,还要测量随机抖动和确定性抖动,以验证您的设备或器件符合这些标准。
另一方面,确定性抖动(DJ)是有界的,始终可以用峰峰值测量。虽然确定性抖动的分布很难预测,但其各个分量的来源和特征很容易预测。如图9所示,确定性抖动可分为周期抖动(PJ)和数据相关抖动(DDJ),数据相关抖动可进一步分为占空比失真(DCD)和符码间干扰(ISI)。请注意,前面抖动测试方法中所示的 20kHz正弦调制就是周期抖动。
图5所示为抖动系谱中的不同抖动分量。
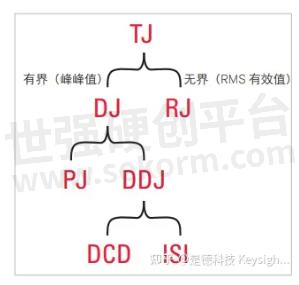
图5 所示为抖动系谱中的不同抖动分量
由于总体抖动中包括理论上无界的随机抖动分量,所以它也是无界的。直接测量总体抖动要求您必须无限期地收集数据。因此,总体抖动始终取决于用户定义的比特误码率(BER),该误码率通常非常小。总体抖动通常以峰峰值来表示。但是即便误码率设置很大,也是无法用示波器直接测量总体抖动的,必须根据收集到的部分数据进行推衍。
随机抖动(RJ-Random Jitter)示波器随机抖动(RJ-Random Jitter)
谈到随机抖动(RJ)时,我们喜欢使用“发生抖动”这一表述方式。随机抖动终究是不可避免的,但我们可以对它进行表征。随机抖动呈现高斯分布(无界),它由三个原因共同造成。
首先,热噪声会引起随机抖动,可以描述为噪声=kTB,其中k是玻尔兹曼常数,T是开尔文温度,B是系统带宽。
其次,散粒噪声(或泊松噪声)可导致RJ。散粒噪声是由电子和空穴的量化造成的固有噪声,并且受到偏置电流的影响。
最后,“粉红”噪声会引起J,它与频率成反比(1/f)。所有系统将具有某种程度的随机抖动。
确定性抖动(DJ-Deterministic Jitter)
确定性抖动是非随机的、有界的抖动,它由设计中的次序出现引起。此外,确定性抖动可以分成多个子分量,如:周期性抖动(PJ)、数据相关抖动(DDJ)、有界不相关抖动(BUJ)。图6所示为一个具有确定性抖动的系统实例。与随机抖动不同的是,确定性抖动的PDF通常有一个以上的峰。
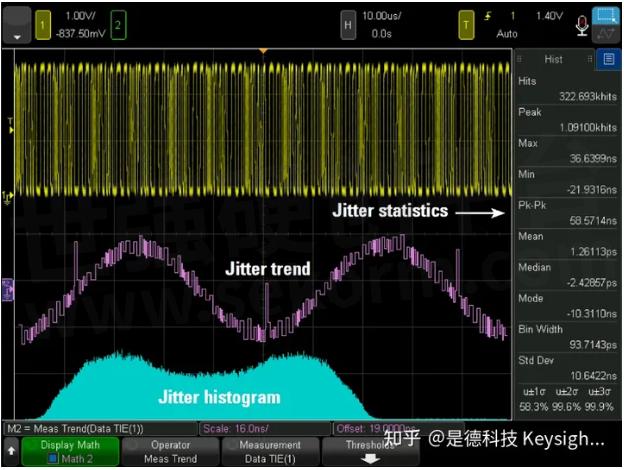
图6:由于此PDF有两个峰(双峰),因此我们可以判断,这个系统中同时存在DJ和RJ。
有界不相关抖动(BUJ-Bounded uncorrelated Jetter)
BUJ可能是最难以追踪的抖动类型,因为它是抖动系谱中最难以理解的一个。通常它也被称为串扰,但“串扰”一词指的不仅仅是BUJ。我们认为BUJ是“不相关”的,因为在统计学上它与系统的其他部分不相关。但是,BUJ是由系统现象造成。BUJ的例子包括由芯片外部来源造成的芯片内部噪声,这种来源可能是电源纹波或射频干扰。有许多工具可用来对串扰建模并识别干扰信号,但产生BUJ的原因通常不受设计师的控制。
周期性抖动(PJ-Periodic Jetter)
周期性抖动可能相关,也可能不相关,但它始终具有周期性。周期性抖动的常见来源之一是开关模式电源耦合到数据或系统时钟中。由于电源与受扰信号没有时间相关性,因此这种抖动被归为不相关抖动。但是,如果一个数据信号耦合到基于同一时钟的数据信号中,那它就具有相关性。识别PJ源的常用方法是使用光谱图。通过绘制TIE测量的趋势(即“我的边缘有多远,随着时间推移它会如何改变?”),然后取趋势图的FFT或频率测量,您就能看到周期性抖动的频率。图3所示为抖动的信号以及随时间变化的TIE曲线。在对干扰信号进行故障诊断时,了解PJ的频率极其有用。
数据相关抖动(DDJ-Data Dependent Jitter )
数据相关抖动可以分成两部分,即占空比失真(DCD)和码间干扰(ISI)。总体抖动的这两个分量都取决于数据信号。
占空比失真(DCD-Duty Cycle Distortion)
占空比失真是指系统所呈现的一个趋势,有一个位(0或1)相比其他位具有特别长的周期。这通常是由两个原因引起。DCD的第一个原因往往是上升沿和下降沿具有不同的压摆斜率。缓慢上升沿可能会导致一到零的跳变发生得更慢。DCD 的另一个常见原因是阈值电平非50%。如果阈值电平过低或过高,一个位将比其他位具有更长的周期。这样会导致抖动,因为0011与0101相比,具有不同的边沿时序。不同的斜压摆率对00 和11没有影响,但对0101有影响。在严重时,DCD可能导致接收机读取错误的位。
码间干扰(ISI-Inter Symbol Interference)
码间干扰有时也称为“数据相关抖动”,是由1或0的长字符串所致。由于具有0或1的长字符串,发射机或物理介质中会出现幅度下降沉降。然后,跳变到相反位可能引起时序不一致。最终,ISI可能由发射机、接收机或物理介质的带宽限制引起,或者由不当的阻抗端接所造成。有限的带宽会限制边沿速度;有限的边沿速度会导致振幅变化。不当端接(或物理介质中的不连续性)会导致信号反射。
如何测量抖动?
抖动测试方法关键要点
•抖动的定义是信号中不需要的时序误差。这种误差会导致边沿交叉点发生的时间稍早或稍晚(TIE)。
•过多的抖动会导致接收端错误地解释比特,最终有可能造成系统错误。
•当您在直方图上看到高斯分布时,说明是随机抖动,您没有太多的办法来消除这种抖动。如果您看到了非高斯分布,则说明是确定性/周期性抖动,这种抖动更容易控制和减少。
•您可以使用示波器的直方图、TIE趋势图和眼图来全面了解信号有多少抖动,以及抖动是否在可接受的范围内。如果不可接受,您就需要进一步优化设计。
示波器可以通过多种不同的方式显示和测量抖动。测量抖动时,首先要调整示波器的时基,以捕获信号的多个周期。然后,示波器将这些周期与参考时钟进行比较。请记住,参考时钟是在时钟恢复过程中还原的。这个参考时钟提供了理想的比特速率,示波器需要根据该比特速率来确定信号到底是合乎理想的信号还是有误差。通过这种比较,示波器可以得到TIE值,并以各种格式显示出来。
理想的比特速率完全可以通过示波器计算得出,您可以输入估计值,或者手动输入明确的技术指标值,然后交给示波器进行计算。第二种方案最精确,而第一种方案最不准确,不过好处是最容易设置。
设置好比特率后,示波器就可以开始分析了。是德科技用于示波器的EZJIT应用软件可以通过各种图形格式,轻松地测量和分析抖动。
直方图-如何使用直方图测量抖动?
直方图中的x轴表示TIE计时值,y轴显示信号中出现这些值时的频次。直方图最重要的功能是帮助您确定信号中的抖动是随机的还是确定性的,两者的比例大约是多少。
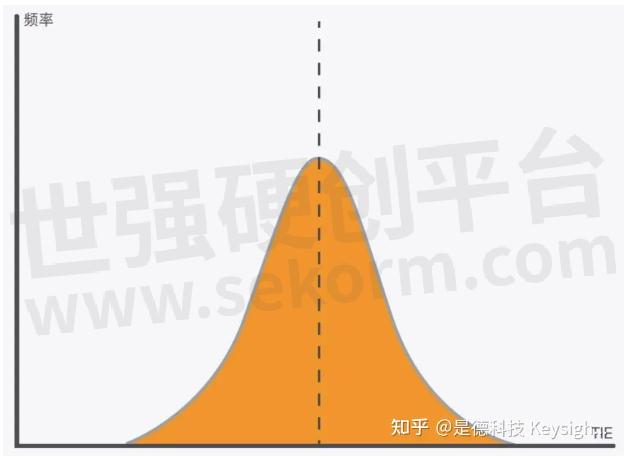
如果信号中只有随机抖动(RJ),则直方图显示为高斯分布(图7)。这是因为随机抖动通常呈高斯分布,在这种情况下,TIE将以零点为中心。大多数TIE值靠近零点,离得越远,我们得到的值越少(换句话说,大误差将会比较少)。这意味着RJ导致明显抖动的概率很小。
反之,如果信号有大量的确定性抖动(DJ),则其直方图看起来不像是高斯分布,而可能是双峰分布,类似于图5所示。这种直方图有两个不同的中心点,而不是只有一个。这是因为在本例中,DJ有正弦调制或周期性抖动,您将在我们讨论TIE趋势图时看到这个结果。TIE值不以零点为中心,而是分别以高/低峰值为中心。因此,DJ更有可能影响您研究的信号。
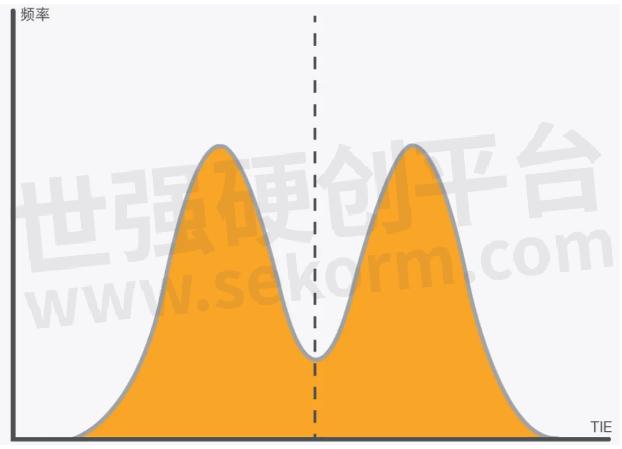
图8. 受DJ影响而呈现双峰分布的直方图。
抖动永远不会是完全随机的或完全确定性的。在几乎所有情况下,直方图都是同时包含高斯特征和非高斯特征(见图9)。但是当您查看直方图时,您可以确定图形的高斯特征更明显(表明RJ更多,您基本上无法消除RJ)还是非高斯特征更明显(表示DJ更多,但您有可能消除DJ)。
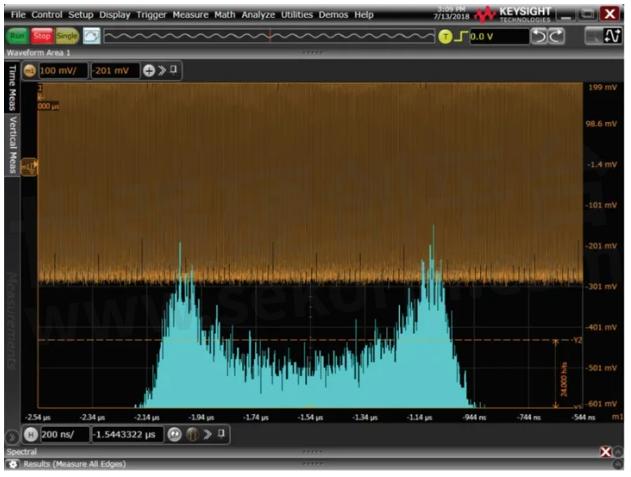
图9. 是德科技的EZJIT应用软件可以显示一个直方图视图,并且因为同时有RJ和DJ存在,所以视图一部分呈高斯分布,另一部分呈双峰分布。
在进行故障诊断时,上升时间、下降时间、周期和占空比等波形参数,均可用直方图表示。这些直方图可以清楚地显示出多模性能分布等条件。然后,这些条件可被用来与传输模式等电路条件相关联。
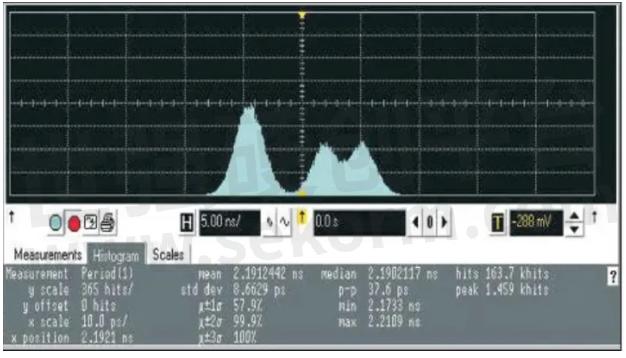
图10. 周期抖动直方图。
图10是一个周期抖动的直方图。左侧驼峰呈现正常的高斯形状,但右侧有两个波峰。进一步分析之后我们发现:这个时钟参考信号的二次谐波和四次谐波是造成抖动的根源。针对一次波形捕获,它可以显示出TIE值在所有比特跳变中出现的频率。这是直方图的一个最重要的应用。
我们通常采用概率分布函数(PDF)来形象地描述抖动。最著名的一个PDF的例子是钟形曲线,它是一个高斯分布的PDF。在您的测试设备上,系统抖动的PDF通常称为直方图。图11所示为KEYSIGHT InfiniiVision 6000 X系列示波器上的一个抖动信号及其直方图。
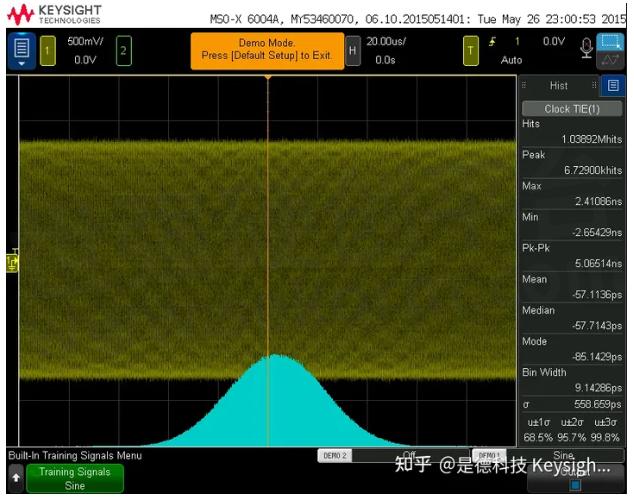
图11:由于这个PDF是高斯分布且仅有一个峰,我们知道随机抖动是这个系统中抖动的主要分量。
TIE趋势图
另一种显示抖动的形式是TIE趋势图,它用y轴表示TIE,用x轴表示出现TIE的时间点。这种图形可以显示TIE随时间变化的趋势,使您可以查看是否存在某种调制或重复的错误码型。图12中的紫色迹线就是TIE趋势图。
在此例中,趋势图与相应的示波器迹线(橙色)一起显示。现在您可以清楚地看到,由DJ引起的TIE实际上是正弦调制。

图12. EZJIT应用软件生成的TIE趋势图显示了TIE正弦调制。
示波器抖动分析软件
眼图
什么是抖动眼图?
眼图对抖动进行了最基本、最直观的视图显示。它是把捕获到的波形当中的所有比特周期相互叠加之后,所得到的复合视图。换言之,就是把周期2到周期3的波形轨迹叠加在周期1到周期2的轨迹之上;并且以此类推,对所有的比特周期进行叠加。
图13是一个理想的眼图,交叉点左右两边的跳变都非常平滑、对称。中间大大张开的“眼睛”就是对每个比特位进行采样的理想位置(“x”标记处)。如果把采样波形的高值或低值设置在这个采样点上,就会使出现比特误码的可能性降到最低。
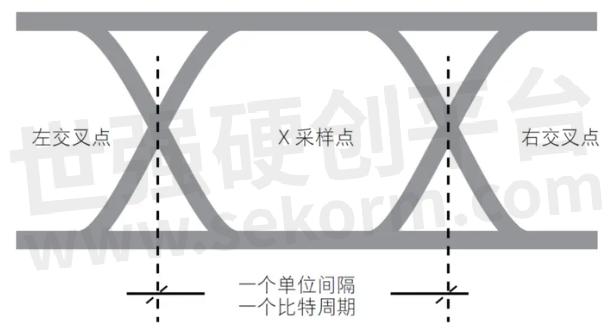
图13. 理想眼图。
图14是一个非理想波形的眼图。但是,这种不规则的形状却给我们带来了大量信息—而且不需要进行更复杂的测量。我们可以看到:底部的幅度变化比顶部小,信号携带的0的数量明显多于1的数量。底部有四条轨迹,因此在一行当中可能会至少出现四个0。而顶部的轨迹只有两条,因而这个波形在一行当中最多只有两个1。波形中有两个不同的上升沿和下降沿,这说明其中存在确定性抖动。上升沿的展宽比下降沿大,而且一些交叉点相交于阈值电平以下,这意味着存在占空比失真,而且0比特的周期或驻留时间比1长。
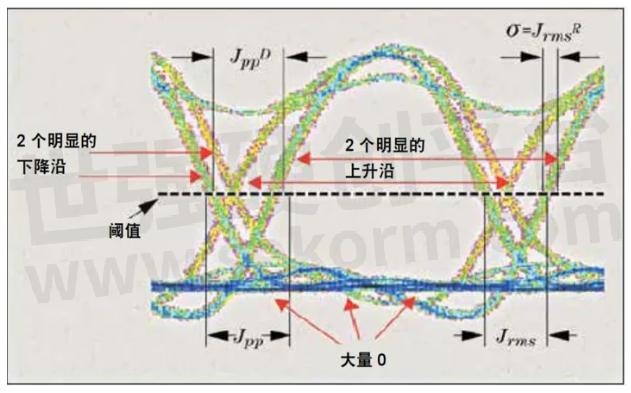
图14. 不规则的眼图形状中包含着非常丰富的信息。
抖动的其他查看方式
学习如何阅读眼图能让您更深入地理解正在处理的抖动分量。您的眼图中是否存在多个不同边沿、异常形状、不同的高/低电平或非单调边沿?这将帮助您进一步分析系统中的哪些抖动分量最具破坏性,而无需求助于复杂的测量。
图15所示为 Keysight InfiniiVision 6000 X系列示波器上的一个眼图实例。
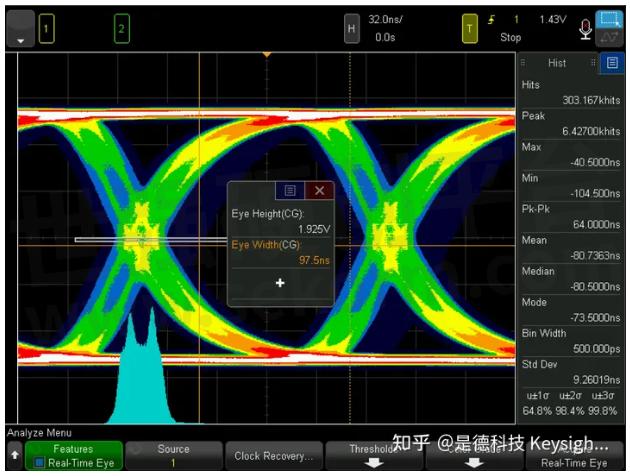
图15:眼图及相应直方图显示双峰DJ和间歇性的延迟上升沿
浴缸曲线
什么是浴缸曲线?
“浴缸曲线”提供了另一种查看抖动的视角,如图16所示。“浴缸曲线”的得名是因为其特征曲线看起来很像一个浴缸的横截面。浴缸曲线是BER值在完整的单位间隔内,随着采样点的变化而形成的曲线图。(请参见附录提示,以便进一步了解关于单位间隔的详情。)它描述了采样时间与BER值之间的函数关系,通常以对数标度进行显示。
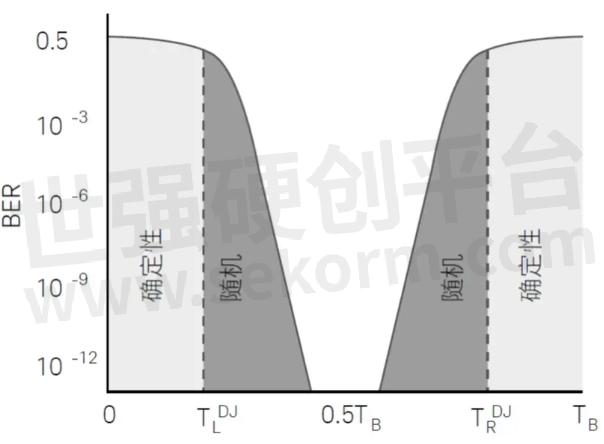
图16. 浴缸曲线
当采样点位于或靠近跳变点时,BER为0.5—比特跳变的成败概率各占一半。这些区域内的曲线相当平坦,绝大部分是确定性抖动。在一个间隔内,当采样点从两端向内移动时,BER出现了陡然下降。这些区域以随机抖动现象为主,且BER的大小取决于产生随机抖动的高斯过程的标准方差。正如所料,这个间隔的中心位置恰好是最佳采样点。
请注意,有采样周期的中间时间上进行了一次BER测量。同样地,通过“眼球”外推法,我们可以估算出这条曲线在单位间隔的中间位置上,BER值将会超过10–18。如此一来,即使是10Gb/s的系统,若想得到这个值,也会需要超过3×108秒的时间。
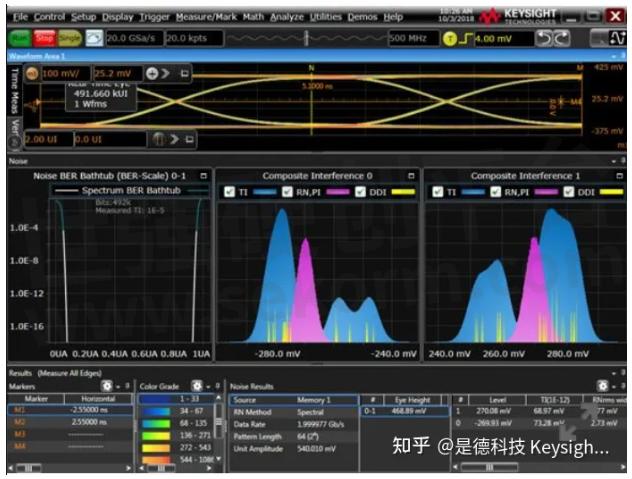
图17所示为浴缸曲线实例。

图17:使用EZJIT Complete 在Keysight Infiniium示波器上自动分离并比较抖动分量
浴缸曲线能帮助您确定比特误码率(BER),并判断抖动的哪一部分是随机性的,哪一部分是确定性的。在评估设计的抖动预算时,浴缸曲线可用于合格/不合格分析,以及为眼图应用置信区间。在指定了BER值(通常为10-12)的条件下,左右边沿的距离越远,抖动容限就越大。当然,两个边沿之间的距离越近,则容限就会越小。这些边沿与从TIE直方图导出的高斯函数的尾部直接相关。浴缸曲线还可用于分离随机抖动和确定性抖动,以及确定随机分量的标准方差。
频域抖动的优势
另一种分析抖动来源的方法是在频域中进行查看。确定性抖动源在频域中显示为线性谱图。这种频域视图可以借助相位噪声或抖动频谱分析来生成。所以,它会涉及到相位噪声以及相对于载波或时钟而言,抖动随频率发生的偏移变化。
相位噪声测量,由于可在测量过程中进行有效的过采样和带宽控制,因此可以帮助实现最精确的抖动评估。这种测量对于检测设计问题,特别是查找锁相环或晶体振荡器的设计缺陷,可以说是“独具慧眼”。它可轻松识别杂散信号引起的确定性抖动。这类测量有助于优化时钟恢复电路,和发现杂散与噪声的内部成因。
相位噪声测量也可以集成到特定带宽内,生成完全整合的抖动信息;尽管它无法直接转化为数据通信标准所指定的峰峰值抖动。
图18是一个锁相环的固有抖动线性谱图。噪声峰值出现在2kHz偏移处。图中还有用于识别确定性抖动源的频率线。这些从60Hz到接近800Hz的线是电源线杂散。2到7MHz范围内明显的频率线最可能是由时钟参考引起的杂散,它们产生了确定性抖动。
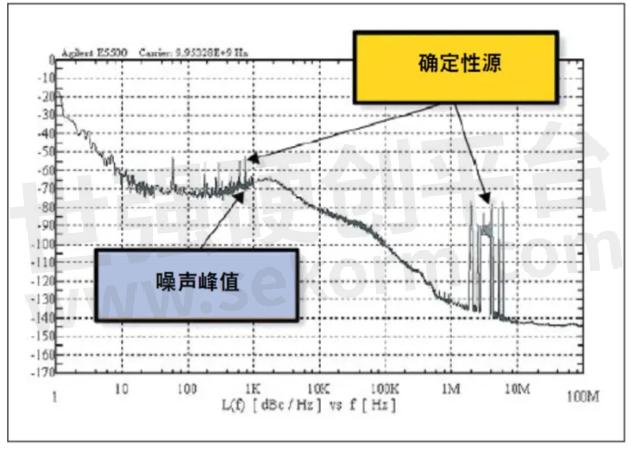
图18. 固有抖动频谱。
对TIE数据进行快速傅里叶变换(FFT)是了解频域抖动的另一种途径。FFT的分辨率要比低电平相位噪声视图低很多,但是这种极为简单快捷的方法非常适合查看高电平现象。
在开发产品时,处理抖动是非常重要的一个环节。有界抖动(即“确定性抖动”)通常是由系统本身或与数据相关的现象导致。无界抖动是由随机噪声而引发。为了分析这些抖动类型的影响,可以综合借助眼图、直方图、浴缸曲线,以及时域频率等抖动测试方法,充分发挥它们各自的优势,让问题迎刃而解。这些信息可以帮助工程师们找出抖动根源,选择最佳途径减少或消除抖动,从而提高其设计对象的传输性能。
抖动技术指标
抖动测量本底是示波器最重要的抖动技术指标。该技术指标由示波器的采样时钟抖动和本底噪声组成,会在示波器内部产生随机抖动,进而影响测量精度。鉴于示波器厂商采用不同的方式指定仪器的抖动测量本底,这便要求工程师有针对性地了解各个技术指标的含义,进而做出明智的购买决策。这些技术指标包括:固有抖动、抖动测量本底和长期抖动。
抖动测量本底是示波器最重要的抖动技术指标。该技术指标由示波器的采样时钟抖动和本底噪声组成,会在示波器内部产生随机抖动,进而影响测量精度。鉴于示波器厂商采用不同的方式指定仪器的抖动测量本底,这便要求工程师有针对性地了解各个技术指标的含义,进而做出明智的购买决策。这些技术指标包括:固有抖动、抖动测量本底和长期抖动。
–固有抖动
示波器的固有抖动(或称为采样时钟抖动)定义为由内部时钟系统传递的抖动数值。为了更好地理解这一定义,我们以数据采样率极高(高达120GSa/s)的实时示波器为例。正因如此,确保各个数据点对齐成为一项关键任务。可以通过两种方式来完成这项任务:使用芯片或时基系统,在模数转换器(A-D)中的采样输入信号和内部时钟之间提供所需的紧密时间关联。与示波器类似,内部时钟也具备抖动技术指标。借助内部时钟的时基对示波器的采样点进行调整,进而也对这个时钟加以表征。因此,示波器整体时基的抖动技术指标被称为采样时钟抖动。
示波器厂商通常采用不同的方式指定仪器的固有抖动。
以是德科技为例,Keysight Infiniium系列示波器的固有抖动是150fs。固有抖动表示在没有其它变量的前提下,示波器理论上的最佳抖动测量。部分厂商称之为示波器的抖动测量本底。然而仅凭固有抖动的技术指标,工程师无法确切地了解示波器贡献了多少抖动对真实抖动测量。
–抖动测量本底
示波器的抖动测量本底来自于采样时钟抖动和叠加在转换边沿上的噪声。示波器的本底噪声会影响这个技术指标。一般来说,测得的转换速率(上升时间)越低,本底噪声的影响也就越大。抖动测量本底技术指标需要考虑示波器的本底噪声。这是因为,噪声是形成示波器抖动的最大因素之一,仅考虑采样时钟抖动技术指标是远远不够的。
以示波器的技术资料为例,进一步介绍示波器的抖动测量本底:
此时,抖动测量本底由三部分组成:采样时钟抖动、噪声和转换速率。每个部分都发挥着重要作用。某些厂商提供的技术资料仅指定了一个数值(例如200fs)。该数值仅能表示示波器的最佳抖动或采样时钟抖动,而不能正确地显示仪器的抖动测量本底。
相比之下,分别指定采样时钟抖动、噪声以及转换速率,便可以更加周密、准确地展示示波器的抖动测量本底。原因在于噪声会影响示波器的抖动。通过查看不同正弦波频率上的时间间隔误差,即可观察到这一现象。

图19. 噪声会影响示波器的抖动,通过查看不同正弦波频率上的时间间隔误差即可观察到这一现象。
图19展示了噪声对示波器抖动的影响。图中是一个20-GHz正弦波,示波器测得的时间间隔误差是190fs。正弦波的频率降至5GHz时,时间间隔误差为400fs(图20)。图21是示波器的抖动与频率完整曲线。请注意,当正弦波的频率增加到30GHz以上时,抖动测量本底接近150fs(采样时钟抖动技术指标)。正弦波频率的转换速率随着频率增加而变快。当正弦波的频率为30GHz时,转换速率比5GHz时的速率快10倍以上。因此,明显在高频正弦波信号输入时由于更快的转换边沿,示波器噪声的衍生影响也较低,对时间间隔误差的测量结果影响也较小。
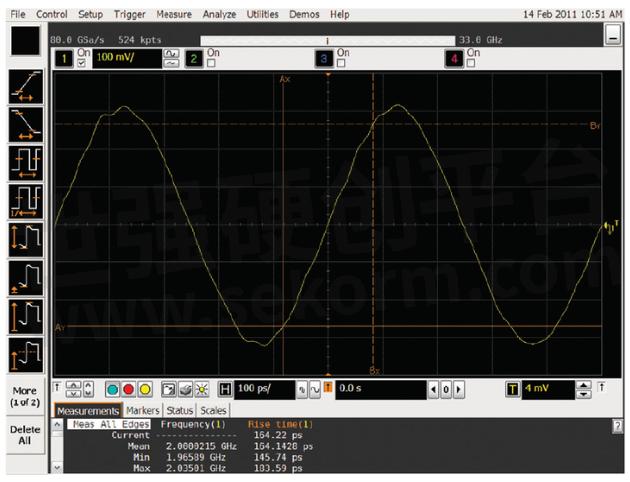
图20. 当正弦波频率下降时,时间间隔误差增加。

图21.该曲线说明了示波器的抖动与频率关系。
–长期抖动
长期抖动技术指标是指时钟经过许多数据点之后,它的输出跳变相对理想位置的最大变化量。随着示波器存储器深度的增加,时基必须以极快的速率对准更多的采样点。由于目前的示波器均提供深存储器,这个问题将变得更加严重。Keysight 90000 X系列示波器现可提供高达2Gpts存储器,对时基带来极大的压力。除此之外,芯片制造商现在能够在长码型上进行抖动分离(例如PRBS23和PRBS31)。在长码型上将随机抖动和确定性抖动准确地分离(例如PRBS23),需要500Mpts或更大内存。对于这样的存储器深度,示波器的长期抖动变得至关重要。
由于长期抖动需要考虑示波器的时基漂移效应,不适合深存储器的时基将会产生明显的漂移,并导致极大的抖动。时基漂移会带来意外的结果:例如,使用2Mpts深内存进行抖动测量可能产生完全不同于100Mpts的结果。
抖动验证
无论采取何种方式指定示波器的抖动,通过以下步骤可对其进行验证:
步骤1.选择一个具有极低抖动、带宽等于或高于示波器带宽的正弦波信号源(例如,Keysight E8267D PSG 矢量信号发生器具备30GHz以上的带宽和极低的抖动)。
步骤2.将正弦波发生器连接至示波器的输入端(图22)。
步骤3.将正弦波发生器的起始频率设为1GHz,并把正弦波输入到示波器。
步骤4.激活示波器的时间间隔误差测量,并记录测量结果。请注意,时钟恢复可设为示波器的恒定时钟恢复。

图22. 示波器显示了抖动与频率的完整曲线。
以上四个步骤是对抖动测量本底曲线的初次测量。为了完整地执行曲线测量,在步进为1-GHz或500-MHz、带宽高达示波器带宽的条件下,重复步骤2至4。
尽管这些步骤简单易用,但您仍需谨记下列问题。首先,由于正弦波的带宽增加,抖动测量本底将会下降。这是因为随着上升时间的加快,噪声对抖动测量本底的影响会降低。事实上,当上升时间低于30ps时,噪声对抖动测量本底的影响超过了示波器的实际采样时钟抖动带来的影响。
另一个必须考虑的因素是,随着正弦波的幅度和偏置发生改变,示波器的测量结果也在变化。以一台对偏置变化极为敏感的示波器为例,它的抖动可能会在偏置增加时急剧恶化。另一家厂商的示波器经过优化后可以实现75%的量程输入(图23)。输入量程增至90%,则抖动测量本底也会增加。
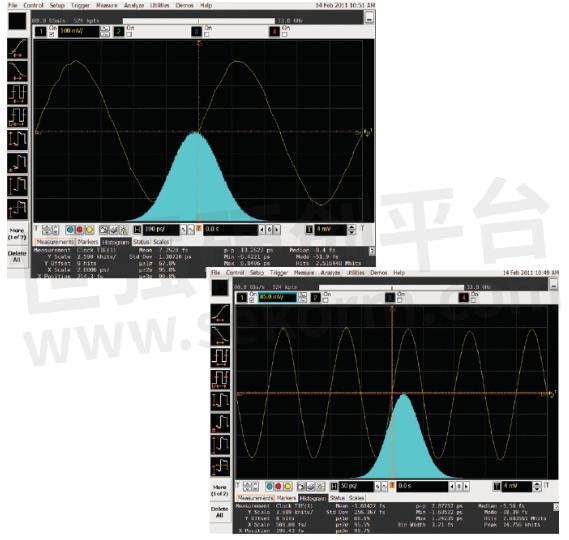
图23. 抖动测量随着频率的下降而增加。
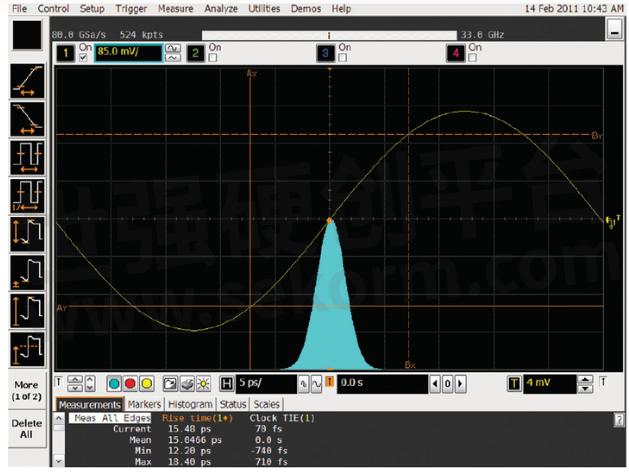
图24. 以X系列示波器为例,随着上升时间的延长,噪声对抖动测量的影响将会增大。
在时间允许的前提下,改变关键测量变量(例如幅度、偏置和输入屏幕的百分比),对测量同一个抖动测量本底曲线或许有所帮助。此时需要考虑的是:上升时间会在频率下降时延长。因此,示波器的噪声会对抖动测量带来更大影响。图24可以说明这一点,它显示了90000 X系列示波器的抖动测量本底。请注意,当正弦波频率高于20GHz时,90000 X系列的固有抖动约为150fs。
您还应当了解示波器抖动与抖动测量接近时的情况。此时,示波器将会对测量带来更多的抖动。尽管示波器可能存在理论上的最低抖动,但这要求器件具有极低的抖动。以带有150fs抖动的器件为例,假定示波器的最低抖动测量本底也是150fs。在本例中,抖动测量会有大概30%至40%的误差。换句话说,实时示波器至多能够达到200fs的抖动测量。
附录
仅用相位扰动表示抖动时,可以考虑在不同的域内进行分析。如果采用数学术语,相位误差(提前或延迟)一般由函数φj(t)表示,因此受抖动影响的脉冲信号可以表示为下面的等式:
其中P代表周期脉冲序列,fd代表数据速率的频率。
这就构成了抖动的数学等价表达式。由于函数的实际参数是弧度,因此可以用∆φ(峰值或有效值相位)除以 2π,以此来表示单位间隔(UI)或比特周期(针对脉冲)的抖动。

单位间隔表达式J(UI)非常有用,因为它可以直观地与比特周期进行比较;或者可以对一种数据速率或标准与其他速率或标准之间进行抖动一致性比较。单位间隔的抖动除以脉冲频率(或乘以比特周期)能够得到以时间为单位的抖动:
总结
在根据抖动预算进行设计和调试时,学习不同的抖动形式仅仅是第一步。随着信号速度变得越来越快,了解不同的抖动分量也将变得更加重要。了解如何使用不同的图表和曲线来确定抖动源,并迅速收集必要的信息,将成为数字系统工程师的关键技能。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由星晴123转载自是德科技 Keysight Technologies知乎,原文标题为:抖动关键术语 - 谈谈抖动测试方法,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关研发服务和供应服务
相关推荐

示波器采样率设置多少比较合适?
尼奎斯特采样定理规定,对于具有最大频率fMAX且带宽有限的信号,等距采样频率fS必须大于最大频率fMAX的两倍,这样才能唯一地重建信号而不会产生混叠。本文KEYSIGHT探讨了示波器采样率设置多少比较合适。

9步走告诉你如何使用示波器
示波器的使用方法, 一方面取决于您现有的示波器的型号和配件,另一方面取决于您想要进行的测量活动。本文介绍了9个简要步骤可满足大多数标准使用情况。

为什么数字示波器能捕获单次或瞬变信号?
KEYSIGHT介绍示波器波形捕获率。

【经验】示波器的使用:如何记录和保存示波器测试结果
是德科技为您演示如何记录示波器的数据。在本文中,您将了解如何保存并调用各种示波器文件类型,包括图像、参考波形和设置。对于本实验,您必须有权访问个人 USB 存储设备。

【经验】如何升级Keysight(原安捷伦)示波器固件?
世强硬创开放实验室有不少是德科技(Keysight)示波器,固件版本都比较老了,以至于一些配件无法正确的识别和匹配,比如1147B探头,被示波器识别为1147A。本文把DSO5000示波器和6000示波器固件升级一下,这里和大家分享升级方法和过程。

【经验】示波器的远程控制及自动化测试教程
示波器作为电子行业最常用的测量仪器之一,牵涉着大量的图片导入导出,数据处理,自动化操作等等。是德科技给大家详细介绍示波器的远程控制步骤包括分享一种无编程既可基础快速实现自动化测试的软件。

【经验】示波器使用同轴线测试高速差分信号技巧
我们使用示波器测试高速差分信号时,可以使用差分探头,也可以使用射频同轴线缆。是德科技的S系列和EXR系列示波器以上都有自动差分功能,首先打开示波器的Setup-Channel菜单,我们会看到示波器通道设置菜单。

【选型】Keysight与Tektronix 3000系列示波器对比分析
本文重点分析Keysight和泰克中档次3000系列示波器。两家的技术走向完全不一样,是德科技新、老款3系示波器主要升级了标配分段存储,泰克的升级主要为外观屏幕,核心技术基本不变。

是德科技提供电子行业的测量仪器、方案及服务,多款专业示波器和分析仪助力获得可信赖的测量
是德科技提供电子行业的测量仪器、方案及服务,主要的产品和服务包括示波器和分析仪。Keysight示波器屡获殊荣,是您在做测量时特别放心的设备。是德科技还提供了多种不同规格的示波器以满足您不同条件下的测量要求。

示波器使用技巧——如何补偿示波器探头?
示波器探头的重要性示波器探头是示波器外部的电路器件,其作用是从被测电路中探测信号,当探头接入被测电路后,探头会成为测试电路的一部分,而探头和示波器相连接,探头又会成为示波器测量系统的一部分。所以探头的电路设计非常重要。由于探头中存在分布电容和分布电感,尤其在进行高频信号测量的时候会使信号的频率特性变差。

【应用】Keysight是德科技N5166B低成本矢量信号发生器用于DAB接收机测试,灵敏度达到-140dBm
DAB接收机测试一般要求灵敏度达到-100dBm左右,需要加载ETI 演示文件,我们可以使用keysight N5166B CXG 射频矢量信号发生器,最低可以测试-140dBm。

E8267D PSG矢量信号发生器数据表
型号- E8267D-1A7,E8267D-HFA,E8267D-H1G,E8267D-409,E8267D-009,E8267D-544,E8267D-423,E8267D-SP2,E8267D-602,E8267D-007,E8267D-403,E8267D-004,E8267D-SP1,E8267D-520,E8267D-003,E8267D-H18,E8267D-HCC,E8267D-UNW,E8267D-UNY,E8267D-UK6,E8267D-UNX,E8267D-1EM,E8267D-UNU,E8267D,E8267D-UNT,E8267D-AMG,E8267D-016,E8267D-A6J,E8267D-HBR,E8267D-513,E8267D-HBQ,E8267D-532,E8267D-1EH,E8267D-HNS,E8267D-1ED,E8267D-H1S

【经验】示波器实时眼图分析操作步骤
眼图是一个信号视图,其中的波形是通过数据速率触发的。本文KEYSIGHT将为你介绍示波器实时眼图分析操作步骤,供各位工程师参考及使用。
安捷伦E4438C静电陀螺仪矢量信号发生器
型号- E4438C-401,E4438C-400,E4438C-422,E4438C-403,E4438C-SP1,E4438C-402,E4438C-259,E4438C-229,E4438C-407,E4438C-XXX,E4438C-409,E4438C-419,E4438C ESG,E4438C-250,E4438C-221

示波器为什么要增加存储深度?
提到示波器,大家都会问一下它的带宽、采样率,那大家有关心过使用的示波器的存储深度吗?今天keysight给大家讲一讲什么是存储深度以及为什么要增加存储深度!

电子商城

现货市场

服务
提供是德(Keysight),罗德(R&S)测试测量仪器租赁服务,包括网络分析仪、无线通讯综测仪、信号发生器、频谱分析仪、信号分析仪、电源等仪器租赁服务;租赁费用按月计算,租赁价格按仪器配置而定。
提交需求>
朗能泛亚提供是德(Keysight),罗德(R&S)等品牌的测试测量仪器维修服务,包括网络分析仪、无线通讯综测仪、信号发生器、频谱分析仪、信号分析仪、电源等仪器维修,支持一台仪器即可维修。
提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论