基于MCU MM32G5330的FlexCAN实现CANopenNode协议栈移植


引言
在现代工业自动化和汽车电子领域,CAN总线以其高可靠性和实时性成为通信的主流选择。而CANopen协议,作为CAN总线上的一种上层通信协议,广泛应用于各种设备间的通信。本文将介绍如何基于灵动MM32G5330的FlexCAN实现CANopenNode协议栈的移植,并使用灵动官方提供的开发板Mini-G5333进行验证。
CANopen简介
CANopen是由CiA (CAN-in-Automation)组织开发的上层通信协议,它定义了一组用于工业自动化的通信对象,并在CAN总线之上实现了网络管理、设备配置和数据交换等功能。CANopen协议规范了设备如何通过CAN总线进行通信,使得不同厂商的设备能够无缝集成和协同工作。
CANopen从应用端到CAN总线的结构:
应用层(Application)
用于实现各种应用对象
对象字典(Object dictionary)
用于描述CANopen节点设备的参数
通信接口(Communication interface)
定义了CANopen协议通信规则以及CAN控制器驱动之间对应关系
CANopen网络中用到的三种通信模型:
主机/从机模型(Master/Salve)
一个节点(例如控制接口)充当应用程序主机控制器,从机(例如伺服电机)发送/请求数据,一般在诊断或状态管理中使用。
通信样例:NMT主机与NMT从机的通信
所有节点通信地位平等,运行时允许自行发送报文,但CANopen网络为了稳定可靠可控,都需要设置一个网络管理主机 NMT-Master。
NMT主机一般是CANopen网络中具备监控的PLC或者PC(当然也可以是一般的功能节点),所以也成为CANopen主站。相对应的其他CANopen节点就是NMT从机(NMT-slaves)。
客户端/服务端模型(Client/Server)
客户机向服务器发送数据请求,服务器进行响应。例如,当应用程序主机需要来自从机OD的数据时使用。
通信样例:SDO客户端与SDO服务端的通信
发送节点需要指定接收节点的地址(Node-ID)回应CAN报文来确认已经接收,如果超时没有确认,则发送节点将会重新发送原报文。
生产者/消费者模型(Producer/Consumer)
生产者节点向网络广播数据,而网络由使用者节点使用。生产者可以根据请求发送此数据,也可以不发送特定请求。
通信样例:心跳生产者与心跳消费者的通信
单向发送传输,无需接收节点回应CAN报文来确认。
CANopen的七种报文类型:
NMT(Network Management)
控制CANopen设备状态,用于网络管理。
SYNC(Synchronization)
SYNC 消息用于同步多个 CANopen 设备的输入感应和驱动——通常由应用程序 Master 触发。
EMCY(Emergency)
在设备发生错误(例如传感器故障)时使用的,发送设备内部错误代码。
TIME
用于分配网络时间,议采用广播方式,无需节点应答,CAN-ID 为 100h,数据长度为 6,数据为当前时刻与1984年1月1日0时的时间差。节点将此时间存储在对象字典1012h的索引中。
PDO(Process Object)
PDO服务用于在设备之间传输实时数据,例如测量数据(如位置数据)或命令数据(如扭矩请求)。
SDO(Sever D Object)
用于访问/更改CANopen设备的对象字典中的值——例如,当应用程序主机需要更改CANopen设备的某些配置时。
Heartbeat
Heartbeat服务有两个用途: 提供“活动”消息和确认NMT命令。
CANopenNode协议栈
CANopenNode是一款免费和开源的CANopen协议栈,使用ANSI C语言以面向对象的方式编写的。它可以在不同的微控制器上运行,作为独立的应用程序或与RTOS一起运行。变量(通信、设备、自定义)被收集在CANopen对象字典中,并且可以以两种方式修改:C源代码和CANopen网络。
CANopenNode主页位于:https://github.com/CANopenNode/CANopenNode
CANopenNode vs CAN Festival
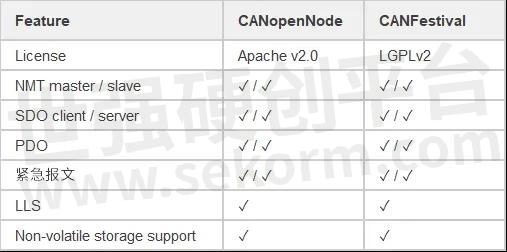
表1
CANopenNode和CANFestival都是用于在嵌入式系统上实现CANopen协议通信的开源软件协议栈。需要注意的是它们使用了不同的开放程度的开源协议。CANFestival使用LGPLv2开源协议。这意味着CANFestival的源代码虽是免费提供的,任何人都可以使用、修改和分发,只要任何衍生作品使用相同的GPL许可证,但如果一个公司在产品中使用CANFestival,他们也必须按照同样的LGPLv2开源协议提供其产品的源代码。而CANopenNode使用 Apache v2.0开源协议,这是一个自由度比LGPLv2更为开发的一个开源协议,允许在使用软件方面有更大的灵活性。任何人都可以使用、修改和发布CANopenNode,甚至用于商业目的,而不需要发布其衍生作品的源代码。
移植前准备
获取CANopenNode源码
选择 CANopenNode v1.3,该版本为CANopenNode 官方发布版本,获取源码链接:https://github.com/CANopenNode/CANopenNode/releases/tag/v1.3。
获取 MiniBoard-OB (MM32G5333D6QV) 例程及开发板资料
开发板及LibSamples详情见灵动官网:https://www.MindMotion.com.cn/support/development_tools/evaluation_boards/miniboard/mm32g5330d6qv/。
编译工具和开发环境
使用基于 Keil MDK-ARM 创建工程。
基于FlexCAN移植CANopenNode
在CANopenNode移植中涉及到三个文件需要被复制引用和修改:
CANopenNode-1.3/example/main.c 文件。
CANopenNode-1.3/stack/drvTemplate/CO_driver.c 文件。
CANopenNode-1.3/stack/drvTemplate/CO_driver_target.h 文件。
其中:
在 mian.c 文件中实现 tmrTask_thread() 函数
通加载进入1ms 定时中断服务函数进行 1ms 定时的信息同步
在 CO_driver.c 文件中实现 CO_CANmodule_init() 函数
用于对 MCU 中的 CAN 模块进行初始,并配置CAN报文的收发参数以及开启 flexcan 中断。
在 CO_driver.C 文件中实现 CO_CANinterrupt() 函数
用于实现接收和发送CAN信息。该功能从高优先级的CAN中断中直接调用。
在 CO_driver.C 文件中实现 CO_CANverifyErrorst() 函数
用于对 CAN 总线进行错误检测和上报。
下面我们将以MM32G5330微控制器上集成的FlexCAN为例,完成对CANopenNode v1.3的移植,并实现一个 CANopen_Basic 样例进行基本功能验证。
首先在灵动官网下载基于Mini-G5330开发板的LibSamples_MM32G5330软件包,并在该软件包的根目录文件夹下创建 ~/3rdPartySoftwarePorting/CANopenNode 文件夹,如下图1所示,将获取的 CANopenNode-1.3 软件包解压后原封不动地复制到新建的 CANopenNode 文件夹中。
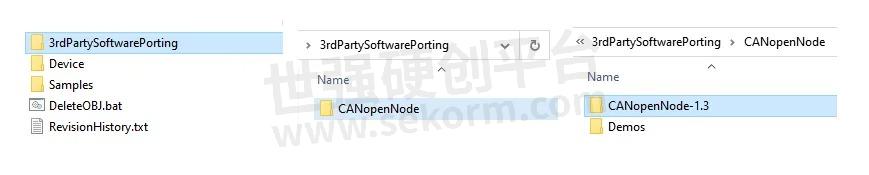
图 1
这里我们在 CANopenNode 文件夹下创建 Demos 文件夹用于按照LibSamples的样例结构创建关于 CANopenNode 相关的样例工程。接下来将CANopenNode源码中提供的example文件夹的结构如下图2所示,其中CO_OD.c/h是 CANopen中使用到的对象字典, 我们将这两个文件复制到 Demos/CANopen_Basic 文件夹下。main.c是 CANopenNode的主程序文件,我们将原有的main.c文件进行替换。
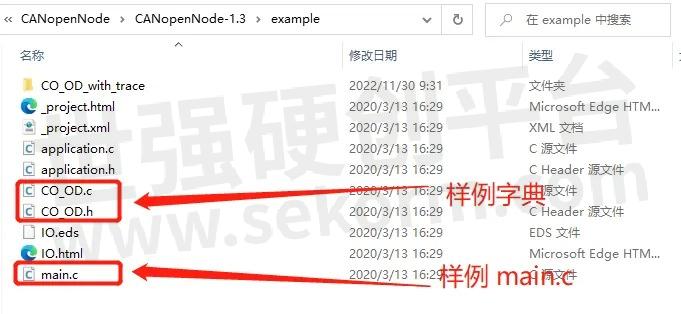
图 2
将如图3所示的位于CANopenNode-1.3/stack/drvTemplate文件夹下的CO_driver.c及CO_driver_target.h这两个文件复制到样例工程的文件夹下。
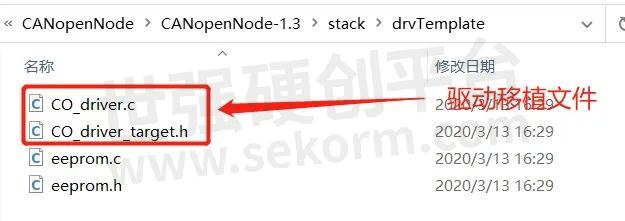
图 3
在CANopen_Basic文件夹下参照LibSample中的样例工程创建MDK-ARM样例工程并添加编译路径,CANopen_Basic样例完成移植后效果如下图所示:
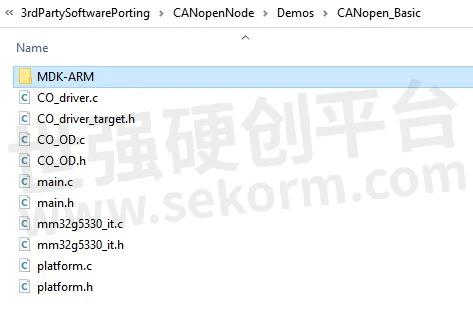
图 4
由于本次移植是基于裸机移植,故按照CANopenNode的设计将Mainline线程放入while(1)中,CAN接收线程放入flexcan的中断服务程序中,定时线程放在一个1ms的定时中断服务程序中。
在 main.c 文件中配置定时器
这里初始化和配置了定时器 TIM1,并实现了与之相关的中断处理程序。
/* Setup the timer. */
void app_tim_init(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
RCC_ClocksTypeDef RCC_Clocks;
RCC_GetClocksFreq(&RCC_Clocks);
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1, ENABLE);
TIM_TimeBaseStructInit(&TIM_TimeBaseInitStruct);
TIM_TimeBaseInitStruct.TIM_Prescaler = (RCC_Clocks.PCLK2_Frequency / APP_TIM_UPDATE_STEP - 1);
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_COUNTERMODE_UP;
TIM_TimeBaseInitStruct.TIM_Period = (APP_TIM_UPDATE_PERIOD - 1);
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStruct);
TIM_ClearFlag(TIM1, TIM_IT_UPDATE);
TIM_ITConfig(TIM1, TIM_IT_UPDATE, ENABLE);
NVIC_InitStruct.NVIC_IRQChannel = TIM1_UP_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
}
void TIM1_UP_IRQHandler(void)
{
TIM_ClearITPendingBit(TIM1, TIM_IT_UPDATE);
tmrTask_thread();
}
在 main.c 文件中实现定时线程任务处理
这里对 tmrTask_thread() 函数进行完善。
/* timer thread executes in constant intervals ********************************/
void tmrTask_thread(void){
INCREMENT_1MS(CO_timer1ms);
if (CO->CANmodule[0]->CANnormal) {
bool_t syncWas;
/* Process Sync */
syncWas = CO_process_SYNC(CO, TMR_TASK_INTERVAL);
/* Read inputs */
CO_process_RPDO(CO, syncWas);
/* Further I/O or nonblocking application code may go here. */
/* Write outputs */
CO_process_TPDO(CO, syncWas, TMR_TASK_INTERVAL);
/* verify timer overflow */
if((TIM_GetITStatus(TIM1, TIM_IT_UPDATE) & TIM_IT_UPDATE) != 0u) {
CO_errorReport(CO->em, CO_EM_ISR_TIMER_OVERFLOW, CO_EMC_SOFTWARE_INTERNAL, 0u);
TIM_ClearITPendingBit(TIM1, TIM_IT_UPDATE);
}
}
}
在 main.c 文件中实现 FlexCAN 的中断服务函数
/* CAN interrupt function *****************************************************/
void FLEXCAN_IRQHandler(void)
{
FLEXCAN_TransferHandleIRQ(FLEXCAN, &FlexCAN_Handle);
CO_CANinterrupt(CO->CANmodule[0]);
__DSB();
}
在 CO_driver.c 文件中实现FlexCAN模块配置
实现包括对 FlexCAN 相关的 GPIO引脚、时钟、CAN报文收发消息缓冲区的配置。
void FlexCAN_Configure(uint32_t can_bitrate)
{
GPIO_InitTypeDef GPIO_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_ClocksTypeDef RCC_Clocks;
flexcan_config_t FlexCAN_ConfigStruct;
flexcan_rx_mb_config_t FlexCAN_RxMB_ConfigStruct;
RCC_GetClocksFreq(&RCC_Clocks);
RCC_APB1PeriphClockCmd(RCC_APB1PERIPH_FLEXCAN, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PINSOURCE11, GPIO_AF_9);
GPIO_PinAFConfig(GPIOA, GPIO_PINSOURCE12, GPIO_AF_9);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_PIN_11;
GPIO_InitStruct.GPIO_Speed = GPIO_SPEED_HIGH;
GPIO_InitStruct.GPIO_Mode = GPIO_MODE_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_StructInit(&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_PIN_12;
GPIO_InitStruct.GPIO_Speed = GPIO_SPEED_HIGH;
GPIO_InitStruct.GPIO_Mode = GPIO_MODE_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = FLEXCAN_IRQn;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStruct);
FLEXCAN_GetDefaultConfig(&FlexCAN_ConfigStruct);
FlexCAN_ConfigStruct.baudRate = can_bitrate*1000;
FlexCAN_ConfigStruct.clkSrc = Enum_Flexcan_ClkSrc1;
FlexCAN_ConfigStruct.enableLoopBack = false;
FlexCAN_ConfigStruct.disableSelfReception = true;
FlexCAN_ConfigStruct.enableIndividMask = true;
#if 1 /* Baudrate calculate by automatically */
FLEXCAN_CalculateImprovedTimingValues(FlexCAN_ConfigStruct.baudRate, RCC_Clocks.PCLK1_Frequency, &FlexCAN_ConfigStruct.timingConfig);
#else /* You can modify the parameters yourself */
FlexCAN_ConfigStruct.timingConfig.preDivider = 23;
FlexCAN_ConfigStruct.timingConfig.propSeg = 6;
FlexCAN_ConfigStruct.timingConfig.phaseSeg1 = 3;
FlexCAN_ConfigStruct.timingConfig.phaseSeg2 = 3;
FlexCAN_ConfigStruct.timingConfig.rJumpwidth = 3;
#endif
FLEXCAN_Init(FLEXCAN, &FlexCAN_ConfigStruct);
/* Set Tx MB_2. */
FLEXCAN_TxMbConfig(FLEXCAN, BOARD_FLEXCAN_TX_MB_CH, ENABLE);
FLEXCAN_TransferCreateHandle(FLEXCAN, &FlexCAN_Handle, FlexCAN_Transfer_Callback, NULL);
/* Set Rx MB_0. */
FlexCAN_RxMB_ConfigStruct.id = FLEXCAN_ID_STD(0x222);
FlexCAN_RxMB_ConfigStruct.format = Enum_Flexcan_FrameFormatStandard;
FlexCAN_RxMB_ConfigStruct.type = Enum_Flexcan_FrameTypeData;
FLEXCAN_RxMbConfig(FLEXCAN, BOARD_FLEXCAN_RX_MB_CH, &FlexCAN_RxMB_ConfigStruct, ENABLE);
/* Set Rx Individual Mask. */
FLEXCAN_SetRxIndividualMask(FLEXCAN, BOARD_FLEXCAN_RX_MB_CH, FLEXCAN_RX_MB_STD_MASK(0x000, 0, 0));
FlexCAN_MB0_FrameStruct.length = (uint8_t)(8);
FlexCAN_MB0_FrameStruct.type = (uint8_t)Enum_Flexcan_FrameTypeData;
FlexCAN_MB0_FrameStruct.format = (uint8_t)Enum_Flexcan_FrameFormatStandard;
FlexCAN_MB0_FrameStruct.id = FLEXCAN_ID_STD(0x222);
FlexCAN_MB0_TransferStruct.mbIdx = BOARD_FLEXCAN_RX_MB_CH;
FlexCAN_MB0_TransferStruct.frame = &FlexCAN_MB0_FrameStruct;
FLEXCAN_TransferReceiveNonBlocking(FLEXCAN, &FlexCAN_Handle, &FlexCAN_MB0_TransferStruct);
}
/******************************************************************************/
CO_ReturnError_t CO_CANmodule_init(
CO_CANmodule_t *CANmodule,
void *CANdriverState,
CO_CANrx_t rxArray[],
uint16_t rxSize,
CO_CANtx_t txArray[],
uint16_t txSize,
uint16_t CANbitRate)
{
uint16_t i;
/* verify arguments */
if(CANmodule==NULL || rxArray==NULL || txArray==NULL){
return CO_ERROR_ILLEGAL_ARGUMENT;
}
/* Configure object variables */
CANmodule->CANdriverState = CANdriverState;
CANmodule->rxArray = rxArray;
CANmodule->rxSize = rxSize;
CANmodule->txArray = txArray;
CANmodule->txSize = txSize;
CANmodule->CANnormal = false;
CANmodule->useCANrxFilters = false;/* microcontroller dependent */
CANmodule->bufferInhibitFlag = false;
CANmodule->firstCANtxMessage = true;
CANmodule->CANtxCount = 0U;
CANmodule->errOld = 0U;
CANmodule->em = NULL;
for(i=0U; i<rxSize; i++){
rxArray[i].ident = 0U;
rxArray[i].mask = 0xFFFFU;
rxArray[i].object = NULL;
rxArray[i].pFunct = NULL;
}
for(i=0U; i<txSize; i++){
txArray[i].bufferFull = false;
}
FlexCAN_Configure(CANbitRate);
return CO_ERROR_NO;
}
在 CO_driver.c 文件中实现FlexCAN的报文收发
对 flexcan_tx() 函数及 CO_CANinterrupt()函数的实现。
/* Send a message frame. */
bool flexcan_tx(CO_CANtx_t *buffer)
{
bool status = false;
flexcan_frame_t FlexCAN_FrameStruct;
flexcan_mb_transfer_t FlexCAN_MB_TransferStruct;
if (!buffer->rtr)
{
FlexCAN_FrameStruct.type = (uint8_t)Enum_Flexcan_FrameTypeData; /* Data frame type. */
}
else
{
FlexCAN_FrameStruct.type = (uint8_t)Enum_Flexcan_FrameTypeRemote; /* Remote frame type. */
}
FlexCAN_FrameStruct.length = (uint8_t)buffer->DLC;
FlexCAN_FrameStruct.format = (uint8_t)Enum_Flexcan_FrameFormatStandard;
FlexCAN_FrameStruct.id = FLEXCAN_ID_STD(buffer->ident); /* Indicated ID number. */
FlexCAN_FrameStruct.dataByte0 = buffer->data[0];
FlexCAN_FrameStruct.dataByte1 = buffer->data[1];
FlexCAN_FrameStruct.dataByte2 = buffer->data[2];
FlexCAN_FrameStruct.dataByte3 = buffer->data[3];
FlexCAN_FrameStruct.dataByte4 = buffer->data[4];
FlexCAN_FrameStruct.dataByte5 = buffer->data[5];
FlexCAN_FrameStruct.dataByte6 = buffer->data[6];
FlexCAN_FrameStruct.dataByte7 = buffer->data[7];
FlexCAN_MB_TransferStruct.mbIdx = 2;
FlexCAN_MB_TransferStruct.frame = &FlexCAN_FrameStruct;
if (Status_Flexcan_Success == FLEXCAN_TransferSendNonBlocking(FLEXCAN, &FlexCAN_Handle, &FlexCAN_MB_TransferStruct))
{
status = true;
}
return status;
}
/******************************************************************************/
CO_ReturnError_t CO_CANsend(CO_CANmodule_t *CANmodule, CO_CANtx_t *buffer){
CO_ReturnError_t err = CO_ERROR_NO;
/* Verify overflow */
if(buffer->bufferFull){
if(!CANmodule->firstCANtxMessage){
/* don't set error, if bootup message is still on buffers */
CO_errorReport((CO_EM_t*)CANmodule->em, CO_EM_CAN_TX_OVERFLOW, CO_EMC_CAN_OVERRUN, buffer->ident);
}
err = CO_ERROR_TX_OVERFLOW;
}
CO_LOCK_CAN_SEND();
bool tx_mb_status = flexcan_tx(buffer);
if(tx_mb_status == true){
CANmodule->bufferInhibitFlag = buffer->syncFlag;
}
/* if no buffer is free, message will be sent by interrupt */
else{
buffer->bufferFull = true;
CANmodule->CANtxCount++;
}
CO_UNLOCK_CAN_SEND();
return err;
}
void CO_CANinterrupt(CO_CANmodule_t *CANmodule){
uint32_t status = FLEXCAN->IFLAG1;
if (0 != (status & (BOARD_FLEXCAN_RX_MB_STATUS)) || (FlexCAN_MB0_RxCompleteFlag))
{
/* receive interrupt */
CO_CANrxMsg_t *rcvMsg; /* pointer to received message in CAN module */
CO_CANrxMsg_t rcvMsgBuff;
uint16_t index; /* index of received message */
uint32_t rcvMsgIdent; /* identifier of the received message */
CO_CANrx_t *buffer = NULL; /* receive message buffer from CO_CANmodule_t object. */
bool_t msgMatched = false;
/* get message from module here */
rcvMsg = &rcvMsgBuff;
rcvMsg->ident = (FlexCAN_MBTemp_FrameStruct.id>> CAN_ID_STD_SHIFT)&0x7FF;
rcvMsg->DLC = FlexCAN_MBTemp_FrameStruct.length;
rcvMsg->data[0] = FlexCAN_MBTemp_FrameStruct.dataByte0;
rcvMsg->data[1] = FlexCAN_MBTemp_FrameStruct.dataByte1;
rcvMsg->data[2] = FlexCAN_MBTemp_FrameStruct.dataByte2;
rcvMsg->data[3] = FlexCAN_MBTemp_FrameStruct.dataByte3;
rcvMsg->data[4] = FlexCAN_MBTemp_FrameStruct.dataByte4;
rcvMsg->data[5] = FlexCAN_MBTemp_FrameStruct.dataByte5;
rcvMsg->data[6] = FlexCAN_MBTemp_FrameStruct.dataByte6;
rcvMsg->data[7] = FlexCAN_MBTemp_FrameStruct.dataByte7;
rcvMsgIdent = rcvMsg->ident;
FlexCAN_MB0_RxCompleteFlag = 0;
/* CAN module filters are not used, message with any standard 11-bit identifier */
/* has been received. Search rxArray form CANmodule for the same CAN-ID. */
buffer = &CANmodule->rxArray[0];
for(index = CANmodule->rxSize; index > 0U; index--){
if(((rcvMsgIdent ^ buffer->ident) & buffer->mask) == 0U){
msgMatched = true;
break;
}
buffer++;
}
/* Call specific function, which will process the message */
if(msgMatched && (buffer != NULL) && (buffer->pFunct != NULL)){
buffer->pFunct(buffer->object, rcvMsg);
}
/* Clear interrupt flag */
FLEXCAN_ClearMbStatusFlags(FLEXCAN, BOARD_FLEXCAN_RX_MB_STATUS);
}
else if (0 != (status & BOARD_FLEXCAN_TX_MB_STATUS))
{
/* Clear interrupt flag */
FLEXCAN_ClearMbStatusFlags(FLEXCAN, BOARD_FLEXCAN_TX_MB_STATUS);
/* First CAN message (bootup) was sent successfully */
CANmodule->firstCANtxMessage = false;
/* clear flag from previous message */
CANmodule->bufferInhibitFlag = false;
/* Are there any new messages waiting to be send */
if(CANmodule->CANtxCount > 0U){
uint16_t i; /* index of transmitting message */
/* first buffer */
CO_CANtx_t *buffer = &CANmodule->txArray[0];
/* search through whole array of pointers to transmit message buffers. */
for(i = CANmodule->txSize; i > 0U; i--){
/* if message buffer is full, send it. */
if(buffer->bufferFull){
buffer->bufferFull = false;
CANmodule->CANtxCount--;
/* Copy message to CAN buffer */
CANmodule->bufferInhibitFlag = buffer->syncFlag;
CO_CANsend(CANmodule, buffer);
break; /* exit for loop */
}
buffer++;
}/* end of for loop */
/* Clear counter if no more messages */
if(i == 0U){
CANmodule->CANtxCount = 0U;
}
}
}
else{
/* some other interrupt reason */
}
}
在 CO_driver.c 文件中实现CAN总线错误检测
关于 CO_CANverifyErrors() 函数的实现。
void CO_CANverifyErrors(CO_CANmodule_t *CANmodule){
uint16_t rxErrors, txErrors, overflow;
CO_EM_t* em = (CO_EM_t*)CANmodule->em;
uint32_t err;
/* get error counters from module. Id possible, function may use different way to
* determine errors. */
rxErrors = (uint16_t) ((FLEXCAN->ECR & CAN_ECR_RXERRCNT_MASK) >> CAN_ECR_RXERRCNT_SHIFT);
txErrors = (uint16_t) ((FLEXCAN->ECR & CAN_ECR_TXERRCNT_MASK) >> CAN_ECR_TXERRCNT_SHIFT);
overflow = (uint16_t) ((FLEXCAN->ESR1 & CAN_ESR1_ERROVR_MASK) >> CAN_ESR1_ERROVR_SHIFT);
err = ((uint32_t)txErrors << 16) | ((uint32_t)rxErrors << 8) | overflow;
if(CANmodule->errOld != err){
CANmodule->errOld = err;
if(txErrors >= 256U){ /* bus off */
CO_errorReport(em, CO_EM_CAN_TX_BUS_OFF, CO_EMC_BUS_OFF_RECOVERED, err);
}
else{ /* not bus off */
CO_errorReset(em, CO_EM_CAN_TX_BUS_OFF, err);
if((rxErrors >= 96U) || (txErrors >= 96U)){ /* bus warning */
CO_errorReport(em, CO_EM_CAN_BUS_WARNING, CO_EMC_NO_ERROR, err);
}
if(rxErrors >= 128U){ /* RX bus passive */
CO_errorReport(em, CO_EM_CAN_RX_BUS_PASSIVE, CO_EMC_CAN_PASSIVE, err);
}
else{
CO_errorReset(em, CO_EM_CAN_RX_BUS_PASSIVE, err);
}
if(txErrors >= 128U){ /* TX bus passive */
if(!CANmodule->firstCANtxMessage){
CO_errorReport(em, CO_EM_CAN_TX_BUS_PASSIVE, CO_EMC_CAN_PASSIVE, err);
}
}
else{
bool_t isError = CO_isError(em, CO_EM_CAN_TX_BUS_PASSIVE);
if(isError){
CO_errorReset(em, CO_EM_CAN_TX_BUS_PASSIVE, err);
CO_errorReset(em, CO_EM_CAN_TX_OVERFLOW, err);
}
}
if((rxErrors < 96U) && (txErrors < 96U)){ /* no error */
CO_errorReset(em, CO_EM_CAN_BUS_WARNING, err);
}
}
if(overflow != 0U){ /* CAN RX bus overflow */
CO_errorReport(em, CO_EM_CAN_RXB_OVERFLOW, CO_EMC_CAN_OVERRUN, err);
}
}
}
至此,驱动代码适配完成。
板载验证
验证环境
使用搭载了MM32G5330 MCU的开发板Mini-G5330 ,以CANopen_Basic样例工程为例,将开发板上的CAN收发器与PCAN相连接,并将PCAN与PC机通过USB相连接,在PC端(基于Win10操作系统)使用PCAN-View上位机模拟CANopen主站,来通过CANopen协议与CANopen从站(即 MM32 MCU)进行通信,如图5所示。
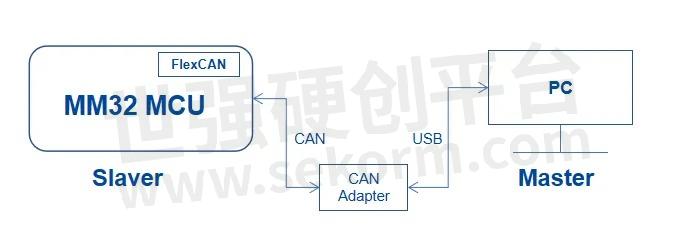
图 5 MCU与PC机交互示意图
注:这里我们使用了PCAN-USB,并使用了配套上位机PCAN-View。
验证过程
上述环境搭建好后,将上述工程代码编译后刷写固件进MCU,将MCU上电并复位通过PC端上位机PCAN-View测试如下指令,观察CANopen节点其对指令的响应,来判断该CANopen节点是否处于正常运行状态。
节点上线:
MCU上电后,CANopen节点应成功启动并向网络发送上线报文。
CANopen节点上线向CAN网络发送CANopen节点上线报文,PC上位机将收到一条如下报文:

表2
之后该CANopen节点以 1000ms 的时间间隔向CAN网络发送节点心跳报文,上位机以1000ms的时间间隔收到如下报文:

表 3
如图6所示。
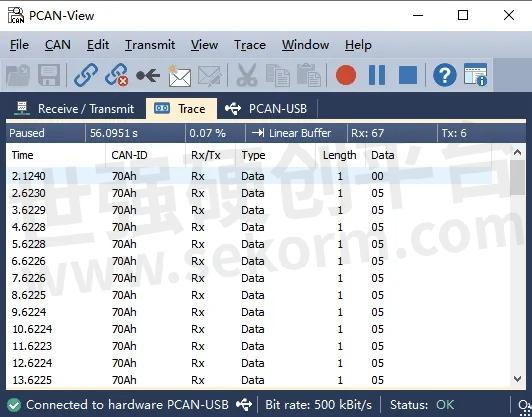
图 6
至此,可验证该CANopen节点设备成功启动并开始正常运行。
模式切换:
通过上位机发送NMT命令,验证节点能够正确响应Start、Stop和Pre-operation等模式切换指令。
将NODE-ID为0x0A的节点设置为 Stop 模式,上位机PCAN-View发送如下指令:

表 4
如下图7所示,可接收到如下报文:
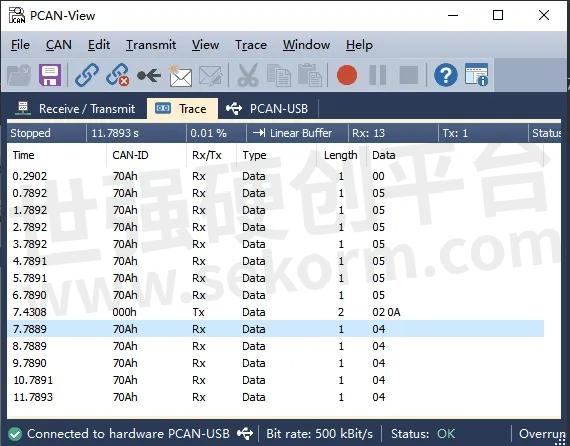
图 7
将NODE-ID为0x0A的节点设置为 Start 模式,上位机PCAN-View发送如下指令:

表 5
如下图8所示,可接收到如下报文:
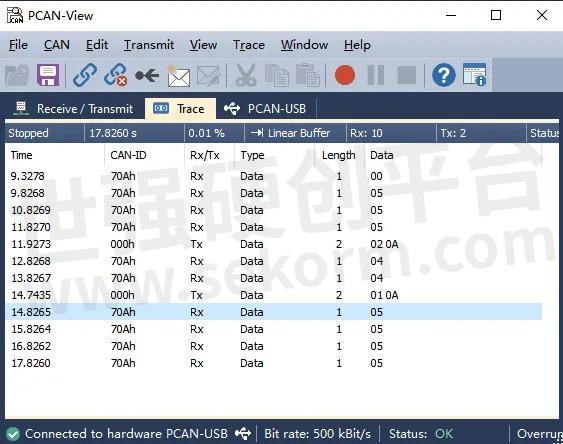
图8
将NODE-ID为0x0A的节点设置为Pre-operation模式,上位机PCAN-View发送如下指令:

表6
如下图9所示,该节点进入Pre-operation模式,可接收到如下报文:
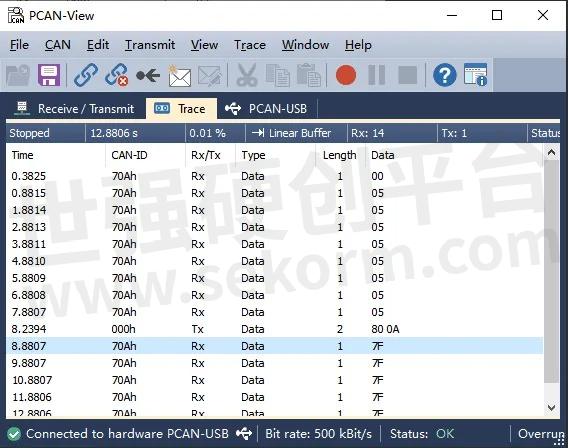
图 9
将NODE-ID为0x0A节点复位,上位机PCAN-View发送如下指令:

表 7
如下图10所示,该节点被复位:
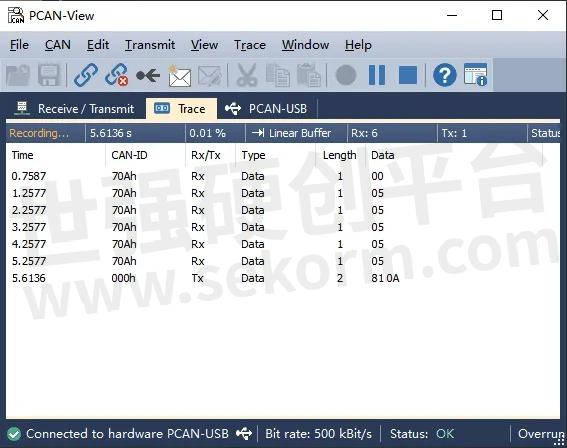
图 10
将NODE-ID为0x0A节点的通信层复位,上位机PCAN-View发送如下指令:

表 8
如下图11所示,该节点通信层被复位,重新上线:
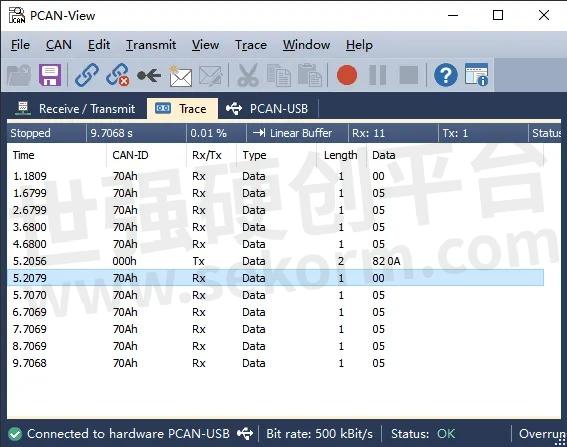
图 11
心跳检测:
节点应周期性发送心跳报文,以表明其处于活跃状态。
获取NODE-ID为0x0A节点的心跳发送间隔时间,上位机PCAN-View发送如下指令:

表 9
如下图12所示,返回该节点当前心跳发送间隔时间为1000(0x03E8)ms:
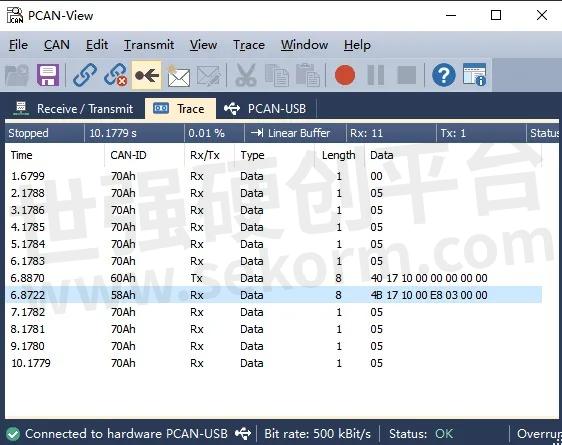
图 12
设置NODE-ID为0x0A节点的心跳发送间隔时间为500(0x01F4)ms,上位机PCAN-View发送如下指令:

表 10
如下图13所示,该节点当前心跳发送间隔时间变为500ms:
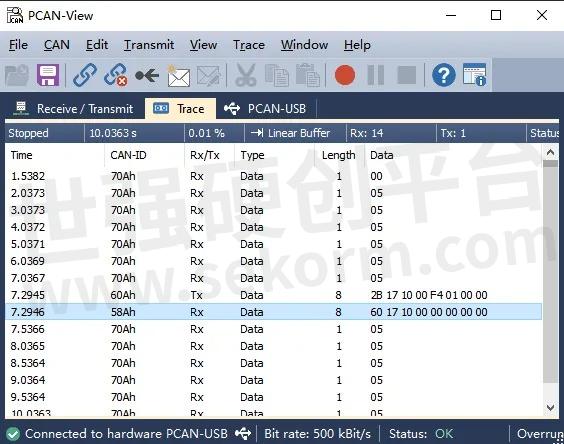
图 13
总结
通过本文的介绍,我们了解了CANopen协议的基本概念,并基于MM32G5330的FlexCAN完成了CANopenNode协议栈的移植工作。通过板载验证,我们确认了移植后的协议栈能够正常工作,为后续的设备集成和通信提供了进一步开发的基础。同样的开发者可以根据实际应用需求使用灵动其他带有FlexCAN的MCU,参考本文的方法进行相应的移植和验证工作,以实现高效可靠的CANopen通信。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由ll转载自MindMotion(灵动微)微信公众号,原文标题为:灵动微课堂 (第281讲)|基于MM32G5330的FlexCAN实现CANopenNode协议栈移植,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关研发服务和供应服务
相关推荐

【技术】一文探讨MCU芯片在智能工业自动化中的应用前景,及其未来的发展方向展望
本文探讨MCU芯片在智能工业自动化中的应用前景,重点介绍超低功耗MCU的关键作用,并探讨它在工业自动化中的应用领域。同时,讨论MCU芯片的发展趋势和未来的发展方向。


【IC】灵动发布全新入门级32位MCU MM32G0001系列,内置时钟全温度范围内偏差不超过±2%
灵动股份推出全新超值型MM32G0001系列MCU。2023年初,灵动首次发布了其主打高性价比的MM32G系列,目前已陆续推出了G0140,G0160和G5330系列产品。为进一步丰富MM32G系列产品组合,灵动和上下游合作伙伴通力合作,打造出全新入门级超值型MM32G0001系列MCU。

CLM1100_YT8512开发板使用手册
描述- 本手册介绍了CLM1100_YT8512开发板的使用方法。该开发板基于国产EtherCAT从站芯片CLM1100,适用于工业以太网应用。主要功能模块包括CLM1100模块、YT8512模块、存储模块、时钟模块、STM32F405模块、电源模块和指示灯。手册详细描述了各模块的功能和操作步骤,包括设备扫描、EEPROM烧录和重新扫描等。
型号- YT8512,CLM1100,CLM1100_YT8512

晟矽微电子两款车规级MCU入选《2023年度长三角汽车电子芯片产品手册》
近日,第三届(2023年)长三角汽车芯片对接交流会在上海张江举办,晟矽微电应邀出席。晟矽微电入选《长三角汽车电子芯片产品手册(2023年)》的两款车规MCU分别为MA60F9113CP48T以及MA51F8203A0Y。

灵动MM32SPIN⸺专注电机控制的MCU和SOC
描述- 灵动微电子推出的MM32SPIN产品家族,专注于电机控制领域,提供包括专用MCU、预驱集成SOC、驱动集成SOC等多种产品。该系列基于M0、M3、Star内核,具备丰富的功能,如电机/电源控制、高精度ADC、轮询COMP、轨到轨OP等。产品适用于多种电机类型,包括有刷直流电机、单相无刷电机、三相无刷电机。此外,还提供丰富的参考设计和开发工具,支持多种应用场景。
型号- SPIN080G,MM32SPIN030C,SPIN360C,MM32SPIN06NT,SPIN033A,SPIN590G,MM32SPIN560C,MM32SPIN05PT,MM32SPIN580C,MM32SPIN05TW,SPIN0260,MM32SPIN27PF,MM32SPINEBK,MM32SPIN0230B3NV,MM32SPIN080GN,MM32SPIN06PF,SPIN02XX,MM32SPIN07,MM32SPIN0280,MM32SPIN160C,SPIN533A,MM32SPIN,MM32SPIN560CM,SPIN27,MM32SPIN023C,MM32SPIN06,MM32SPIN05,MM32SPIN0230B1NV,MM32SPIN422C,MM32SPIN0280D4PV,MM32SPIN0280D6PV,SPIN060G,SPIN0250,SPIN080C,SPIN222C,SPIN0290,SPIN040C,MM32SPIN080CN,MM32SPIN0230,MM32SPIN060G,MM32SPIN080C,SPIN0230,MM32SPIN040C,SPIN56XX,MM32SPIN37,MM32SPIN05NW,SPIN580C,SPIN160C,SPIN023C,MM32SPIN05NT,MM32SPIN06PT,MM32SPIN0280D6QV,MM32SPIN360C,SPIN0280,SPIN495C,MM32SPIN030CN,MM32SPIN27NF,SPIN560C,SPIN05XX,MM32SPIN07PF,SPIN07,SPIN06,MM32SPIN05PF,MM32SPIN27PQ,MM32SPIN0230B3TV,SPIN5630,MM32SPIN05PFOP,MM32SPIN27PS,MM32SPIN27PT,MM32SPIN0230B1TV,MM32SPIN37PSD,SPIN05,MM32SPIN533A,MM32SPIN033A,MM32SPIN27,MM32SPIN0280D7PV,MM32SPIN222C,SPIN080X,SPIN422C,MM32SPIN0280DAPV,SPIN030C,MM32SPIN080G
CLM1100_YT8522开发板使用手册
描述- 本手册介绍了CLM1100_YT8522开发板的使用方法。该开发板基于国产EtherCAT从站芯片CLM1100,适用于工业以太网应用。主要功能模块包括CLM1100模块、YT8522模块、存储模块、时钟模块、STM32F405模块、电源模块和指示灯。手册详细描述了各模块的功能和操作步骤,包括设备扫描、EEPROM烧录和重新扫描等。
型号- CLM1100,YT8522,STM32F405,CLM1100_YT8522

累计交付超4亿颗!世强硬创获低功耗32位MCU厂商灵动股份授权
MindMotion(灵动股份)MM32WB0510系列配套软件支持各种蓝牙Profile,提供小尺寸协议栈,最小仅占用12KB Flash和2KB RAM。

【IC】“灵动·星”系列MM32高性能MCU产品搭载Star-MC1提供强劲内核动力,性能提升20%
“灵动·星”系列 MM32 高性能 MCU 产品,搭载安谋科技(Arm China)Star-MC1 内核性能,其1.5 DMIPS / MHz,提升 20% ,4.02 CoreMark / MHz,提升20% 。目前包含 4 个子系列: MM32F3,灵动·天枢 MM32F5,灵动·玉衡 MM32G5,灵动·天玑 MM32H5,为用户提供灵活、丰富的选择。
CLM1100_KSZ8721开发板使用手册
描述- 本手册介绍了CLM1100_KSZ8721开发板的使用方法。该开发板基于国产EtherCAT从站芯片CLM1100,适用于工业以太网应用。主要功能模块包括CLM1100模块、KSZ8721模块、存储模块、STM32底板等。手册详细说明了各模块的详细介绍和使用步骤,包括设备扫描、EEPROM烧录和重新扫描等操作。
型号- CLM1100,STM32F405,KSZ8721,CLM1100_KSZ8721

MCU赛道很卷,先楫HPM5300杀进汽车、工业、新能源领域如何出圈?
HPM5300系列是一款高性能RISC-V内核通用微控制器,产品面向工业自动化、新能源及汽车电子这三大热门应用领域。回顾先楫半导体此前推出的产品系列,HPM6700 /6400可以帮助工业自动化客户实现驱控一体化设计,HPM 6200可以帮助新能源客户实现电源的数字化控制,HPM 6300可以帮助汽车客户实现车身网络、传感器融合等。

【IC】灵动微电子高性能通用32位MCU产品MM32H5480荣获“2024年度硬核MCU芯片奖”
近日,第六届硬核芯生态大会在深圳举办,同期2024年度硬核中国芯获奖榜单正式发布。作为国内领先的本土通用32位MCU产品及解决方案供应商,MindMotion灵动微电子凭借高性能产品MM32H5480斩获“2024年度硬核MCU芯片奖”。
CLM1100_DP83848 _2.0开发板使用手册
描述- 本手册介绍了CLM1100_DP83848 2.0开发板的使用方法。该开发板基于国产EtherCAT从站芯片CLM1100,适用于工业以太网应用。手册详细描述了开发板的功能模块、模块详细介绍、使用说明,包括主站TwinCAT扫描设备、烧录EEPROM中的XML文件、重新扫描EEPROM等步骤。
型号- CLM1100,CLM1100_DP83848 _2.0,CLM1100_DP83848,DP83848

晟矽微首颗车规MCU芯片MA51F8203A0Y通过AEC-Q100认证,助力汽车电子行业国产化进程
晟矽微电子车规级MCU芯片MA51F8203A0Y通过第三方实验室AEC-Q100 Grade 1可靠性等级测试。晟矽微电提供的符合汽车功能安全标准的产品将会源源不断进入市场流通,助力汽车电子行业的国产化进程,为行业的未来发展注入新的活力。

芯海科技车规MCU芯片CS32F036Q荣获IAEIS 2024“年度汽车电子科学技术奖”
2024年6月29日,由深圳汽车电子协会主办的IAEIS 2024第十三届国际汽车电子产业峰会在深圳宝安圆满落幕。本场峰会,芯海科技受邀参会,同时旗下32位车规级微控制器CS32F036Q荣获了“2023年度汽车电子科学技术奖——突出创新产品奖”的殊荣。

电子商城

现货市场


服务
可定制显示屏的尺寸0.96”~15.6”,分辨率80*160~3840*2160,TN/IPS视角,支持RGB、MCU、SPI、MIPI、LVDS、HDMI接口,配套定制玻璃、背光、FPCA/PCBA。
最小起订量: 1000 提交需求>
拥有IC烧录机20余款,100余台设备,可以烧录各种封装的IC;可烧录MCU、FLASH、EMMC、NAND FLASH、EPROM等各类型芯片,支持WIFI/BT模组PCBA烧录、测试。
最小起订量: 1 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论