地平线自动驾驶算法新突破,两篇科研论文入选学术顶会ECCV 2024



近日,地平线两篇论文入选国际计算机视觉顶会ECCV 2024,自动驾驶算法技术再有新突破。
ECCV(European Conference on Computer Vision,即欧洲计算机视觉国际会议),是计算机视觉领域中最顶级的会议之一,与ICCV(International Conference on Computer Vision)和CVPR(Conference on Computer Vision and Pattern Recognition)并称为计算机视觉领域的“三大顶会”。ECCV每两年举行一次,吸引了全球顶尖的研究人员、学者和业界专家,分享最新的研究成果与技术创新。
聚创新之力 答智驾课题
本次地平线被录用的2篇论文是:
1、Lane Graph as Path: Continuity-preserving Path-wise Modeling for Online Lane Graph Construction
(《LaneGAP:用于在线车道图构建的连续性路径建模》)
论文链接:https://arxiv.org/abs/2303.08815
2、Occupancy as Set of Points
(《OSP:基于点集表征的占据网格预测》)
论文链接:https://arxiv.org/abs/2407.04049
车道图构建新方案:端到端学习路径,大幅提升预测规划性能
在线车道图构建是自动驾驶领域一项有前途但具有挑战性的任务。LaneGAP 是一种车道图构建新方法,将端到端矢量地图在线构建方法 MapTR(入选深度学习顶会ICLR spotlight论文)拓展到道路拓扑建模,能够大幅提升预测规划性能,应对各种复杂交通状况。LaneGAP 和 MapTR 相关工作已经在地平线高阶智驾系统SuperDrive中落地应用。
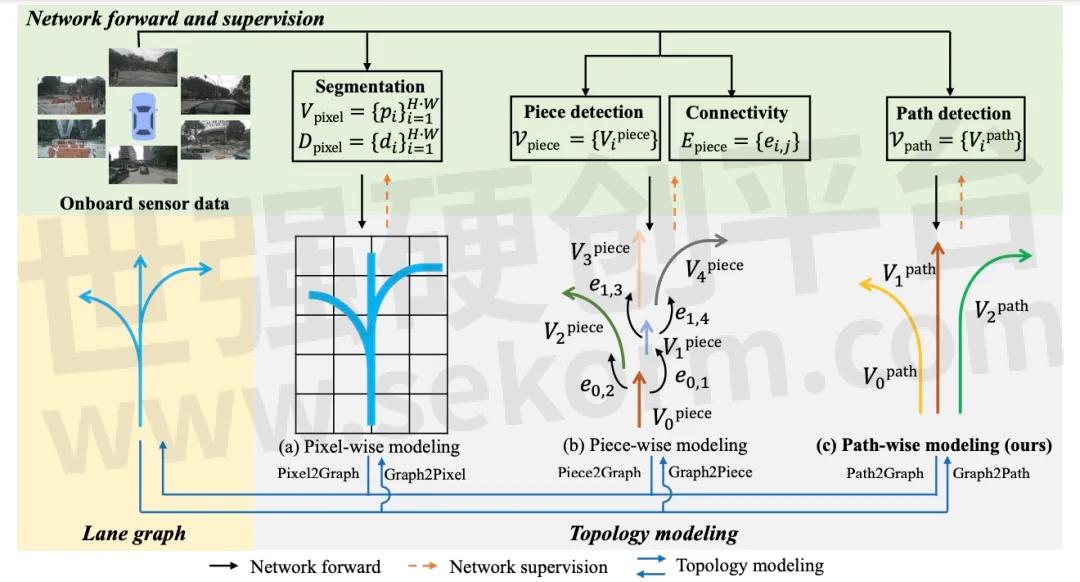
具体而言,以前的方法通常在像素或片段级别对车道图进行建模,并通过逐像素或分段连接恢复车道图,这会破坏车道的连续性。作者提出一种基于路径的在线车道图构建方法—— LaneGAP,它采用了端到端学习路径,并通过 Path2Graph 算法恢复车道图。LaneGAP在具有挑战性的 nuScenes 和 Argoverse2 数据集上定性和定量地证明了 LaneGAP 优于传统的基于像素和基于片段的方法。丰富的可视化效果显示 LaneGAP 可以应对各种复杂交通状况。
Occupancy新突破:全新视角,性能更强大,计算更灵活
OSP提出了全新视角下的自动驾驶场景建模算法——稀疏点集占据网格预测方法,通过与2D图像特征交互的点查询,建立了一种新的基于点的占用表示,可以全面理解3D场景,并且框架更灵活,性能更强大。
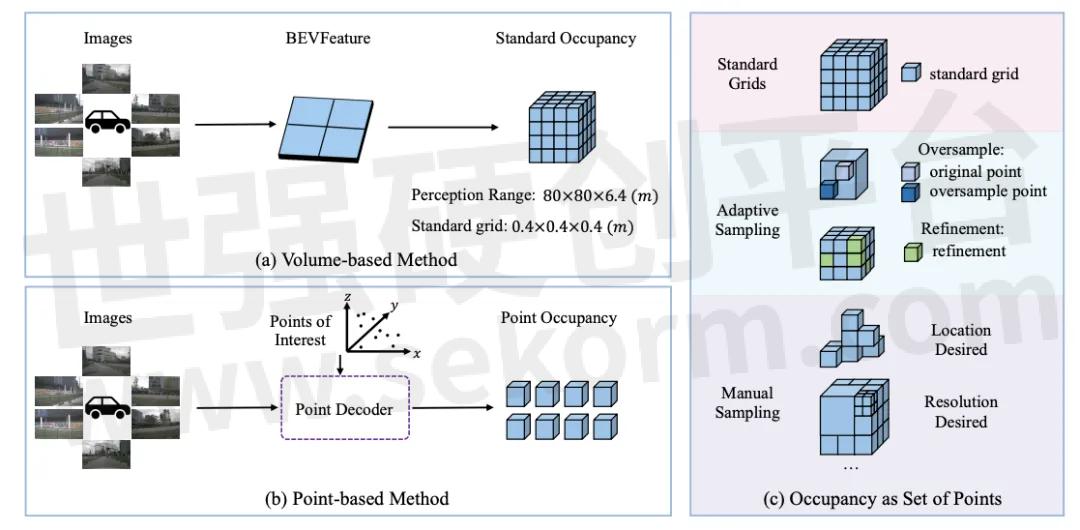
本文探索了利用多视角图像进行3D占据网格预测的新方法,称为“点集占据网格”。现有方法倾向于利用BEV表征进行占据网格预测,因此很难将注意力集中在特殊区域或感知范围之外的区域。相比之下,本文提出了Points of Interest (PoIs) 来表示场景,并提出了 OSP,一种基于点的 3D 占用预测的新框架。得益于点集表征的灵活性,OSP 与现有方法相比实现了强大的性能,并且在训练和推理适应性方面表现出色:可以预测感知边界外的范围;可以与基于体特征的方法集成以提升性能。在Occ3D nuScenes占用基准上的实验表明,OSP具有强大的性能和灵活性。
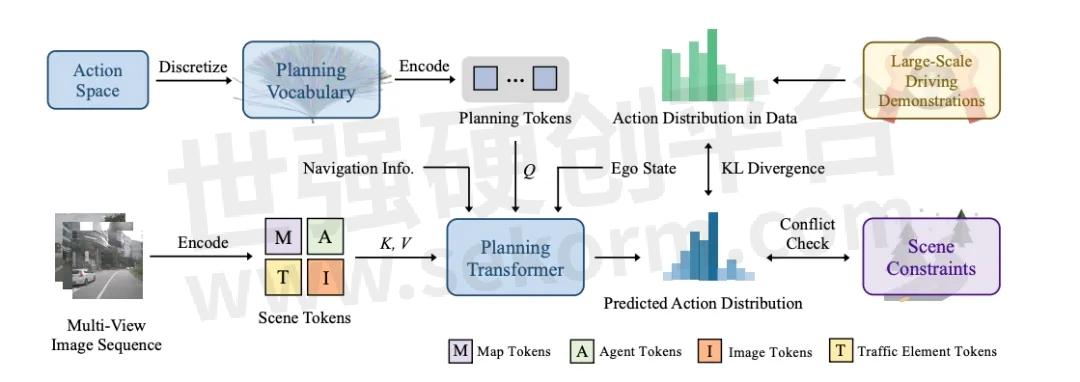
除了这两篇斩获ECCV 2024的最新成果,地平线在ICCV 2023上提出的VAD也有创新进展。VADv2首次提出基于概率建模的多模态决策端到端自动驾驶大模型,在闭环榜单Carla Town05 Benchmark上达到SOTA的端到端自动驾驶规划性能。
此前,VAD初步探索了基于矢量化场景表征的端到端自动驾驶算法框架,在此基础上,VADv2首次将多模态概率规划引入端到端自动驾驶,用于解决判决式模型无法建模决策的天然多模态特性的问题,从而有效提升决策的准确率。VADv2以数据驱动的范式从大量驾驶数据中端到端学习驾驶策略,在Carla闭环榜单上,相比于此前的方案,VADv2大幅提升驾驶评分,实现SOTA性能,在无需规则后处理的情况下也能有良好的驾驶表现。
于7月21日-27日,正在奥地利维也纳举办的2024国际机器学习大会(ICML 2024)上,地平线被ICML 2024接收的最新工作Vision Mamba(简称Vim)也受邀做了分享。Vision Mamba是一种新的通用视觉主干模型,相比现有的视觉Transformer,在性能上有显著提升,是接替Transformer的下一代视觉基础模型。
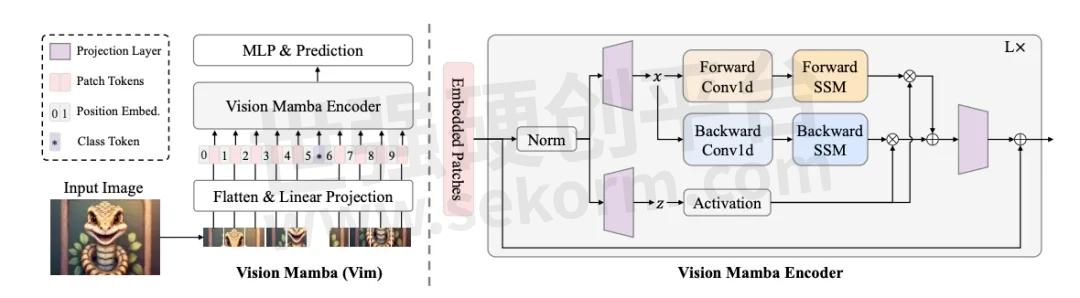
Vision Mamba使用双向状态空间模型(SSM)对图像序列进行位置嵌入,并利用双向SSM压缩视觉表示。在ImageNet分类、COCO目标检测和ADE20k语义分割任务中,Vim相比现有的视觉Transformer(如DeiT)在性能上有大幅提升,同时在计算和内存效率上也有显著改进。例如,在进行分辨率为1248×1248的批量推理时,Vim比DeiT快2.8倍,GPU内存节省86.8%。这些结果表明,Vim能够克服在高分辨率图像理解中执行Transformer样式的计算和内存限制,具有成为下一代视觉基础模型主干的潜力。
- |
- +1 赞 0
- 收藏
- 评论 9
本文由ll转载自地平线HorizonRobotics公众号,原文标题为:地平线自动驾驶算法新突破,科研论文入选学术顶会 ECCV 2024,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
评论
全部评论(9)
-
![]()
![]() 用户34169263 Lv7. 资深专家 2024-11-24学习下
用户34169263 Lv7. 资深专家 2024-11-24学习下 -
![]()
![]() Timm Lv9. 科学家 2024-09-01学习
Timm Lv9. 科学家 2024-09-01学习 -
![]()
![]() zwjiang Lv9. 科学家 2024-08-16学习
zwjiang Lv9. 科学家 2024-08-16学习 -
![]()
![]() Chase Lv7. 资深专家 2024-08-08学习
Chase Lv7. 资深专家 2024-08-08学习 -
![]()
![]() Timm Lv9. 科学家 2024-08-08学习
Timm Lv9. 科学家 2024-08-08学习 -
![]()
![]() 炎宁 Lv7. 资深专家 2024-08-07好
炎宁 Lv7. 资深专家 2024-08-07好 -
![]()
![]() 小蛮大人 Lv9. 科学家 2024-08-05学习
小蛮大人 Lv9. 科学家 2024-08-05学习 -
![]()
![]() 小云帆 Lv7. 资深专家 2024-08-03学习了
小云帆 Lv7. 资深专家 2024-08-03学习了 -
![]()
![]() 崇乾 Lv8. 研究员 2024-08-02学习
崇乾 Lv8. 研究员 2024-08-02学习








相关推荐

地平线全新一代智驾方案SuperDrive背后的“思考”:如何让智驾决策更像老司机
地平线全新一代智驾方案Horizon SuperDrive™为了解决城区的规控难题采用了更拟人、更像老司机的“交互博弈”。从响应人,到服务人,再到解放人,智能驾驶在不断演进的过程中,完成的是人的高维延伸,用优雅不怂、从容笃定形容的高阶智驾系统,一定能够像“老司机”一样预测、推理、学习、决策。

地平线SuperDrive获铃轩奖金奖,软硬结合打造高阶智驾系统标杆
今年4月,地平线重磅推出凝聚软硬结合全栈智驾技术打造的高阶智驾系统——Horizon SuperDrive™(简称HSD)。作为下一代高阶智驾系统行业标杆,HSD以端到端的世界模型与交互博弈构成的领先算法架构,解决智驾产品性能上限和泛化一致体验的难题。系统不止拥有高度拟人的优雅从容姿态、超强通行效率,更能提供全国一致的极致智驾体验,让用户享受体验无断点、模式无切换、全场景无差别的安全美好出行。

你好,开发者:基于连续路径建模的车道拓扑构建算法主题分享
在ECCV 2024上,地平线-华中科技大学联合实验室提出一种车道拓扑构建新方法—— LaneGAP,通过端到端学习路径,旨在解决传统像素级和片段级建模方法所面临的车道连续性问题,实现了车道拓扑的连续性保留,大幅提升预测规划性能,为自动驾驶中的规划模块提供更可靠的路径指导。值得一提的是,LaneGAP 相关工作已经在地平线高阶智驾系统SuperDrive中落地应用。

【IC】地平线发布征程6和高阶城区智驾样板间,以顶级的软硬结合全栈技术加速智驾平权
2024年4月24日,地平线举办“征程所向,向高而行”——2024智驾科技产品发布会。立足于智能驾驶时代,地平线凭借对软硬结合全栈技术理念的前瞻预判和深厚积累,重磅发布新一代车载智能计算方案征程®6系列以及Horizon SuperDrive™全场景智能驾驶解决方案,全面开启智能驾驶的范式级创新,加速智驾平权时代的到来。

全程零接管!地平线高阶智驾系统SuperDrive畅通闹市区雨天晚高峰
大众汽车集团(中国)CEO贝瑞德与地平线CEO余凯共同试乘地平线高阶智驾系统SuperDrive,在北京闹市区雨天晚高峰挑战中,SuperDrive以零接管、高效拟人驾驶完成50分钟复杂城区行程,展现卓越通过能力和丝滑驾驶体验,二人共赞其为理想智驾产品。

世界模型:地平线眼中的「认知大脑」
在8月28日举办的地平线高阶智驾技术开放日上,地平线创始人兼CEO余凯博士就当下火热的端到端,智能驾驶未来发展趋势、地平线软硬结合的王炸产品Horion SuperDrive™(HSD™),与参会嘉宾进行了真诚的分享。其中,余凯博士提到,“端到端是每家公司都能掌握的,魔鬼在细节中。” 本篇文章即从端到端讲起 ,并为大家剖析何为地平线的“驾驶世界观”。

一组数字读懂地平线高阶智驾技术开放日!
地平线在北京举办的高阶智驾技术开放日上,展示了其Horizon SuperDrive™(HSD™)系统的最新进展。该系统旨在2025年实现高阶智驾的规模化发展,提供全场景智驾模式和安全保障。地平线的技术在多个算法挑战赛中获奖,并计划通过World Model和交互博弈模型实现性能和体验的优化。征程6芯片将支持这一全场景智驾解决方案,以实现高效、拟人化的驾驶体验。

「老司机」首秀后,关于Horizon SuperDrive™的十问十答
4月24日,地平线发布了全新一代车载智能计算方案征程®6系列和Horizon SuperDrive™全场景智能驾驶解决方案。这两款产品的发布标志着地平线作为下一代全场景高阶智驾的行业标杆,为行业提供了全场景、全天候的高阶城区智能驾驶功能。围绕SuperDrive的拟人体验、端到端算法实践、原生软硬结合等优势,筛选了10个热门典型问题,带来了系统且更具针对性的解读。

地平线与四维图新围绕智驾系统等多领域签署战略合作协议,打造高阶智驾解决方案
近日,地平线与四维图新达成战略合作,双方将建成全面战略合作伙伴关系,推动众源更新、ADAS、行泊一体,以及基于芯片能力互补打造的驾舱一体等多领域业务融合。地平线将基于征程®系列芯片及配套开发工具,发挥智驾视觉感知等技术优势,与四维图新开展一系列智能驾驶系统级全面合作,助力四维图新开发与落地市场领先的技术产品,为行业高速发展贡献力量。

地平线提供征程®系列车规级AI芯片与宏景智驾达成战略合作,共推高阶自动驾驶解决方案量产落地
6月24日,地平线与宏景智驾宣布正式成为生态战略合作伙伴,开启软硬件解决方案的全面合作。宏景智驾将基于地平线征程®系列车规级AI芯片,研发L2/L2+高阶辅助驾驶ADAS和面向L3/L4的高等级自动驾驶AD解决方案,加速智能驾驶系统的商业化发展和量产落地。

地平线与MAXIEYE达成战略合作,软硬联合部署高阶行泊一体解决方案
2022年8月2日,中国智能驾驶芯片领导者地平线与智能驾驶全栈创新及系统方案服务商智驾科技MAXIEYE宣布达成战略合作,双方将立足各自产业链布局和优势,MAXIEYE在服务于乘用车企的MAXIPILOT®高阶平台方案上。

【经验】地平线ISP工具Control tool的使用方法介绍
Control tool是isp-tuning时tuning ISP参数的图形界面工具,对于刚接触地平线的开发者来说,会比较陌生,下面详细介绍Control tool的使用方法。

地平线与大众汽车集团旗下软件公司CARIAD合资公司正式成立,强大智能驾驶计算方案驱动出行变革
行业领先的智能驾驶计算方案提供商地平线与大众汽车集团旗下软件公司CARIAD正式宣布合资公司酷睿程(CARIZON)成立。新合资公司将整合地平线强大的软硬结合技术能力以及CARIAD在智能车身和软件系统整合方面的专业经验,开发行业领先的、高度优化的全栈式高级驾驶辅助系统和自动驾驶解决方案。酷睿程将基于地平线征程家族计算方案开展研发工作,落地智驾方案将搭载于大众汽车集团在中国市场的纯电动车型。

智驾征程|MG ES5全球首秀!上汽MG名爵与地平线首个合作车型正式落地
MG ES5搭载了基于地平线征程®3的Horizon Mono™️高级辅助驾驶方案,可以提供多项辅助驾驶及主动安全功能,包括智能巡航辅助、车道保持辅助、智能超速报警等,并覆盖大曲率弯道和匝道通行、车道变化分流通行等更多场景,以更聪明的方案为用户带来更好用的智驾体验。

地平线算法工具链新进展! GANet在征程®5上实现高效部署
地平线征程5是专为高阶智能驾驶打造的智能计算方案,搭载地平线第三代架构BPU--贝叶斯(Bayes),算力可达128TOPS,是率先实现前装量产的国产百TOPS级智能计算方案。基于征程5开发的高等级自动驾驶方案可实现ADAS功能、高速导航智能驾驶、城区导航智能驾驶和智慧泊车的全场景覆盖。

电子商城

现货市场
服务
提供7~27寸工控机定制,支持嵌⼊式/ 壁挂式 /桌⾯式/悬挂式等安装方式,采用纯平⾯板IP65防尘防⽔等级,莫⽒7级硬度触摸屏,兼容多种操作系统:组态软件/安卓/XP/win7/8/10/Linux等,支持主板、接⼝、外观、⽀架、刷卡器、⾝份证阅读器、LOGO、⻨克⻛、系统、电池、蓝⽛、4G/5G、摄像头、GPS系统、⼆维码扫描器、指纹等特殊应⽤场景定制
最小起订量: 1台 提交需求>
针对电子系统中的详细传热和流体流动模拟进行优化,可准确分析复杂的两相冷却组件(如热管/均热板),量化利用率,并警告是否干涸。
实验室地址: 深圳 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论