基于TOF和安全皮肤的机械臂全域安全系统


(一) 产品介绍
与传统工业机器人相比,协作机器人面临着更为复杂的运行环境。它们需要在高度非结构化和动态变化的环境中操作,涉及大量的机器间协作以及人机交互。这种新型应用场景对机器人的安全防护提出了前所未有的挑战。
目前,传统的机器人安全防护技术主要依赖于碰撞避免策略,通过各种传感器划定安全区域。常见的解决方案包括基于安全光幕的安全控制、使用激光雷达进行作业区域监控,以及固定区域的侵入体报警系统。这些方法价格昂贵,功能单一,无法柔性调整。难以满足协作机器人的高度安全需求。
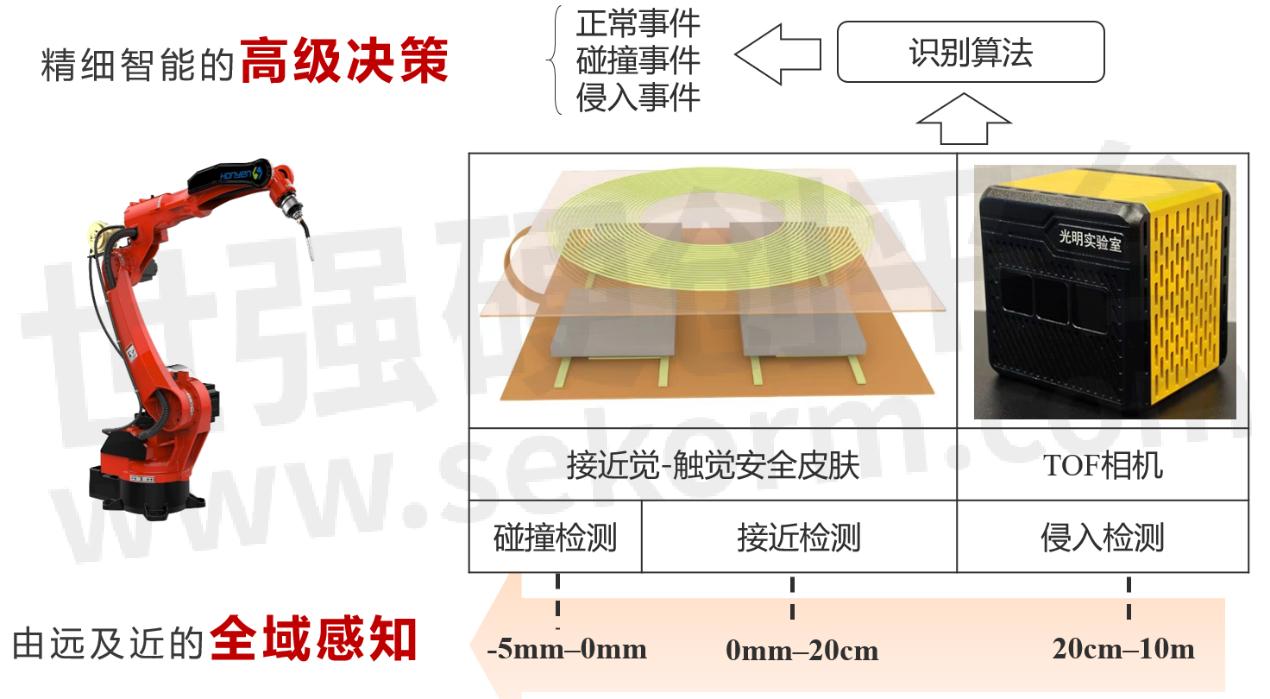
因此,我们团队设计了一种基于TOF与安全皮肤的机器人全域感知安全系统。这套系统由TOF相机和安全皮肤组成,相比传统方案具备由远及近的全域感知能力,通过一系列识别的算法和规则,可以针对不同的事件实现更加精细的应对。
(二)系统架构
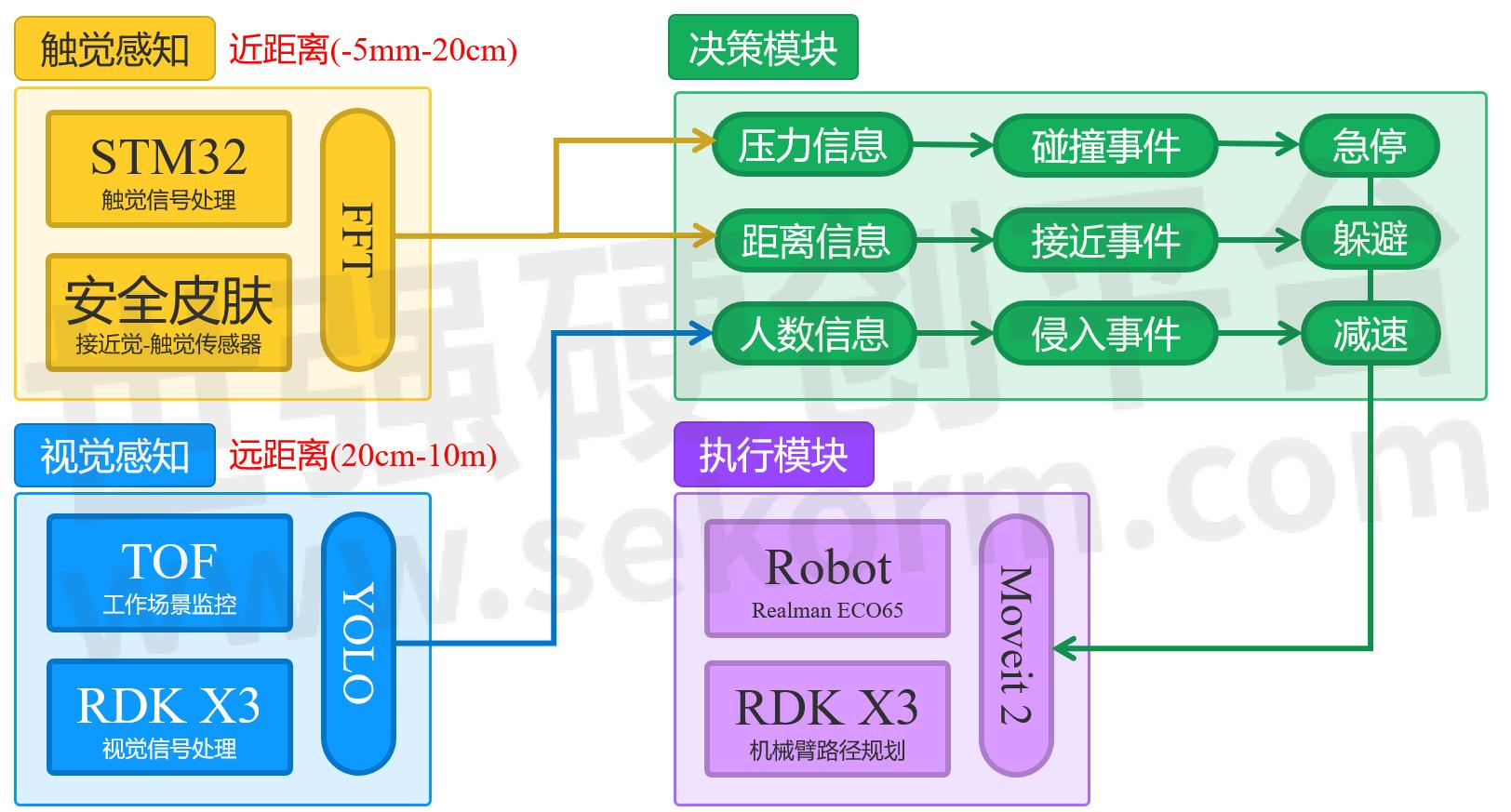
我们使用了两块RDKX3,分别用于视觉感知和决策、控制的实现。触觉感知模块通过接近觉触觉传感器感知环境,搭配STM32对触觉信号进行片上解析,并通过MicroROS与决策模块通信。视觉感知模块通过TOF相机感知环境,搭配部署在RDK X3上的YOLO网络对视觉信号进行实时处理,并通过TROS与决策模块通信。控制模块使用Moveit2控制机械臂。
(三)硬件系统
我们为操作人员设计了一款安全手环,它的原理是一个小型信号发生器。我们的接近觉传感器会检测到这些信号。从而通过幅值推断距离,通过频率区分人员。
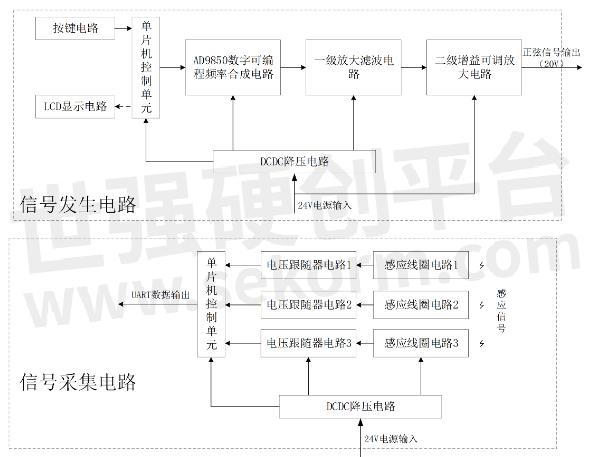
信号采集系统整体硬件主要由两大部分构成:信号发生电路部分和信号采集电路构成。
信号发生电路部分是为了产生频率可调的正弦波信号,单片机通过按键电路设置正弦波频率,控制DDS芯片AD9850产生正弦波信号,经过一级放大滤波电路进行初级放大后输入至增益可调的二级放大电路中进一步将正弦信号放大至幅值为20V左右的正弦信号输出。
信号采集电路是将感应线圈产生的模拟感应电压信号进行AD采集并转换为UART信号输出。信号采集电路AD采集有三路完全一致的采集通道,感应线圈产生的感应电压通过电压跟随器隔离后输入至单片机ADC采集引脚并将采集到的电压信号通过UART口输出至上位机。电压跟跟随器电路具有高输入阻抗,低输出阻抗的特点,可以起到隔绝前后端电路的作用,保护后级单片机电路,且提高采样精度。
(四)特色功能
功能一:提前防范(视觉,20cm-10m)
无人环境下,机械臂正常高速运行。有人闯入时,机械臂减速运行。
功能二:自主绕行(接近觉,0-20cm)
当人进一步阻碍机械臂运行时,机械臂会尝试绕行。
功能三:主动躲避(接近觉,0-20cm)
当人更进一步靠近机械臂时,机械臂会自主的远离
功能三:主动躲避(触觉,-5-0mm)
当人按压机械臂时,机械臂会主动远离。
功能四:人员安全级别设定
我们的触觉感知模块,可以区分人员。通过对不同人员设定不同的安全级别。可以实现人员的分类管理。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由雪飘梦飞转载自D-Robotics官网,原文标题为:基于TOF和安全皮肤的机械臂全域安全系统,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

人形机器人的应用场景及技术问题分析
机器人未来将深刻影响我们的生活,中国在人形机器人技术专利申请方面处于领先地位,累计申请量居世界首位,显示出中国在全球机器人技术竞争中的强大实力。人形机器人的制造核心产业链涉及:减震器、电机、结构件、面板、材料、半导体芯片及器件。
技术探讨 发布时间 : 2024-07-10

【技术】一文介绍机器人所需的十大传感器
本文KODENSHI介绍机器人所需的十大传感器,机器人常用传感器根据检测对象的不同可分为内部传感器和外部传感器。内部传感器主要用来检测机器人本身状态(如手臂间角度),多为检测位置和角度的传感器。
技术探讨 发布时间 : 2023-03-25

机器人内外部传感器有哪些?
机器人是由计算机控制的复杂机器,它具有类似人的肢体及感官功能;动作程序灵活;有一定程度的智能;在工作时可以不依赖人的操纵。机器人传感器在机器人的控制中起了非常重要的作用,正因为有了传感器,机器人才具备了类似人类的知觉功能和反应能力。本文KODENSHI将为大家介绍机器人都有哪些传感器。
技术探讨 发布时间 : 2024-05-17

阿普奇与工业人型机器人头部企业形成合作,为工业机器人企业提供稳定可靠的边缘智能计算一体化方案
由于在工业机器人控制器及软硬件一体化解决方案领域的研发与实际应用中具备长期经验,阿普奇与工业人型机器人头部企业形成合作,持续为工业机器人企业提供稳定可靠的边缘智能计算一体化方案。
原厂动态 发布时间 : 2024-07-26


基于RDK X3和OriginBot的手势控制机器人应用案例
通过视觉进行人手检测、跟踪和手势识别,根据手势类别生成不同运动控制指令并控制机器人运动,包括左右旋转和前后平移运动。该功能支持机器人实物和Gazebo仿真两种体验方式。以下操作过程以OriginBot为例,满足条件的其他机器人使用方法类似。
设计经验 发布时间 : 2024-11-13

2023工博会开展在即,机器自动化与数字化解决方案供应商步科带来全新的机器人解决方案
围绕“1+N”的发展战略,以机器人领域为核心,集成机器人、自动化和数字化技术,赋能和助力N个制造业的智能化发展。步科深耕机器人行业,在工业AMR/AGV、协作机器人、无人叉车、服务机器人、料箱机器人、建筑机器人、畜牧机器人等机器人领域提供动力、显示、控制等解决方案及产品、技术,本届工博会来360°了解步科的机器人方案吧!
原厂动态 发布时间 : 2023-09-12

机器人的频率控制大师,石英晶体振荡器给电子硬件装上一颗安心的心脏
晶科鑫晶振,作为机器人的“时间守护者”,以其精准的频率控制,确保了机器人在各种环境下的稳定运作。在工业生产线上,它让机器人精准无误地完成每一个动作;在极端环境中,它保持机器人的稳定运行,无论是在地震救援还是深海探索。晶振的小型化设计,更是让它在机器人紧凑的体内发挥着巨大的作用,为机器人的精密操作提供了强有力的支持。
应用方案 发布时间 : 2024-11-13

【IC】D-Robotics RDK X5机器人开发者套件,可提供高达10 Tops算力,加速智能化应用快速落地
D-Robotics RDK X5搭载Sunrise 5智能计算芯片,可提供高达10 Tops的算力,是一款面向智能计算与机器人应用的全能开发套件,接口丰富,极致易用,支持Transfomer、RWKV、Occupancy、Stereo Perception等多种复杂模型和最新算法,加速智能化应用快速落地。
产品 发布时间 : 2024-09-20


地平线RDK实现智能循线机器人应用示例
巡线任务,即机器人小车能够自主跟着一条引导线向前运行。地平线RDK通过摄像头获取小车前方环境数据,图像数据通过训练好的CNN模型进行推理得到引导线的坐标值,然后依据一定的控制策略计算小车的运动方式,通过UART向小车下发运动控制指令实现整个系统的闭环控制。
设计经验 发布时间 : 2024-11-12

格瑞普可提供机器人锂电池定制服务,高能量密度体积比,具备3~5倍快速充电
格瑞普生产的机器人电池可用于各种各样的机器人,如娱乐型机器人、医疗机器人、军用机器人、水下机器人、护理机器人、清洁机器人、管道机器人等,涉及到民用机器人、商用机器人等个机器人领域。
原厂动态 发布时间 : 2022-03-15

【IC】XELA Robotics新品触觉传感器专为机器人手指尖而设计,具有柔软、耐用、弯曲的特点
XELA Robotics最新款触觉传感器是专为机器人手指尖而设计的。每个uSkin Curved有30个触觉晶体管。柔软、耐用和弯曲的设计使得机器人有着更加类似于人的触觉。数字输出能为您提供更快、更精确的测量,同时将电噪声和干扰降到最小。
新产品 发布时间 : 2022-12-01

【IC】迈来芯突破性Arcminaxis™位置感应技术及产品,专为机器人关节打造,提升设计的灵活性
迈来芯宣布推出突破性磁性技术Arcminaxis™。这一技术专为满足市场对经济实惠且高精度机器人关节位置感应解决方案需求的日益增长而设计。首款搭载Arcminaxis™技术的产品MLX90384,附带支持校准和高效操作的磁铁及软件包,为设计提供简便性和经济性。
产品 发布时间 : 2024-11-11


电子商城

授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论