NodeHub包含各种开源Node,能够快速安装和使用 ,助您快速搭建室内服务机器人Demo!


indoor_service_robot
该Demo包含了室内服务机器人所需的基础功能,包括地图建立、自主导航、垃圾检测以及人体骨骼关键点检测等,有助于您快速搭建室内服务机器人!
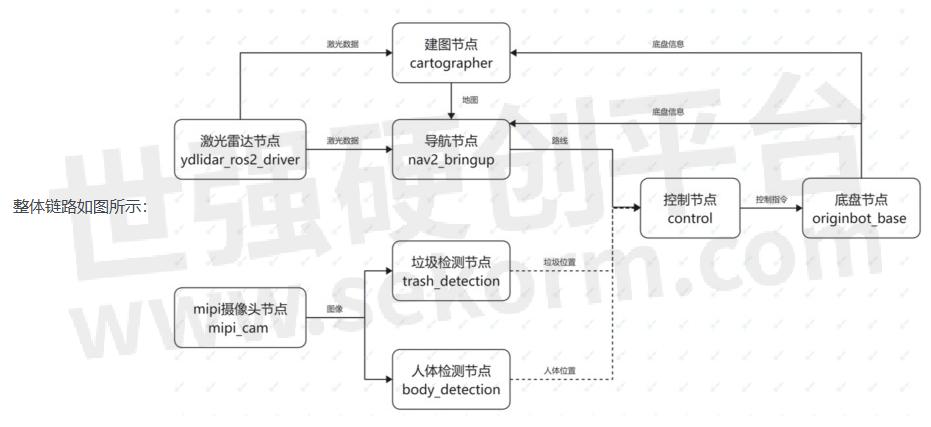
为实现上述功能,我们需要激光雷达,摄像头,运动底盘以及计算平台。
对应的模块有:
1、激光雷达模块:获取周围障碍物的准确位置并传递给建图模块和导航模块。
2、底盘模块:发布底盘信息用于建图和导航,同时接收控制模块的控制消息,拆分为各电机的控制,实现机器人运动。
3、建图模块:接收激光雷达的激光数据与底盘的消息并建立当前环境的地图。
4、导航模块:接收激光雷达的激光数据与底盘的消息并读取已保存的地图,规划出机器人运动到指定位置的路线。
5、摄像头模块:获取周围环境的图像并传递给垃圾检测模块和人体检测模块。
6、垃圾检测模块:接收摄像头的图像并识别出垃圾在图像中的位置。
7、人体检测模块:接收摄像头的图像并识别出人体在图像中的位置。
8、控制模块:接收导航模块的路线消息,垃圾检测模块和人体检测模块的物体位置信息,控制机器人运动。
该Demo支持小车自动导航的同时进行视觉检测,但控制方面只按照导航的指令运动,若希望增加垃圾定位,人体跟随等功能,可自行开发控制节点。
接下来需要对以上所有的模块进行详细说明,NodeHub是地平线为广大开发者提供给的“智能机器人应用中心”,该应用中心中包含各种不同功能的开源Node,能够快速安装和使用,通过串联不同的Node可以完成室内服务机器人的搭建。
实现细节
激光雷达模块
NodeHub中“外设适配”栏目包含多种传感器,包括各类相机以及激光雷达,可以快速部署使用,请按照实际的激光雷达型号选择,这里以YDLIADAR激光雷达驱动为例。
查看《YDLIADAR激光雷达驱动》Node可知:
该Node发布话题名称为/scan,话题类型为/sensor_msgs/LaserScan。
若安装时YDLIDR已连接在RDK X3上,则安装完后需要重新拔插一次。
点击Node页面“一键部署”按钮,将生成的如下命令拷贝至RDK X3终端运行。
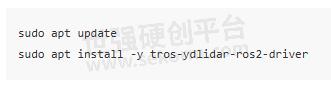
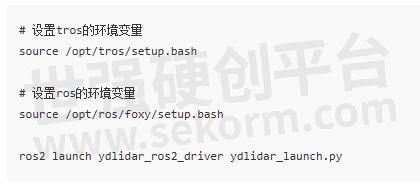
在完成“一键部署”后,启动该Node的命令为:
底盘模块
NodeHub中“外设适配”栏目包含多种机器人底盘,需要按照实际的机器人型号选择,此处以Originbot底盘驱动为例,该节点发布里程计的数据用于建图和导航,同时接收控制节点的消息,分解为对各个电机的控制,从而实现小车运动。
查看《Originbot底盘驱动》Node可知:
该Node订阅/cmd_vel话题,类型为geometry_msgs/msg/Twist,此话题与控制Node发布的话题一致,用于获取控制信息进行电机控制。
发布/originbot_status、/odom、/tf_static三个话题,分别是机器人状态,里程计消息以及机器人坐标系信息。
点击Node页面“一键部署”按钮,将生成的如下命令拷贝至RDK X3终端运行。

在完成“一键部署”后,启动该Node的命令为:
建图模块
NodeHub中“环境感知”栏目中Cartographer激光雷达SLAM能够接收激光雷达的激光数据与底盘的消息并建立当前环境的地图。
查看《Cartographer激光雷达SLAM》Node可知:
该Node订阅话题有/odom,/scan,对应底盘模块和激光雷达模块发布的消息,用于获取激光雷达的激光数据与底盘的消息建立地图。
发布话题有/map,可用于在rviz2可视化建图的效果。
点击Node页面“一键部署”按钮,将生成的如下命令拷贝至RDK X3终端运行。
在完成“一键部署”后,启动该Node的命令为:
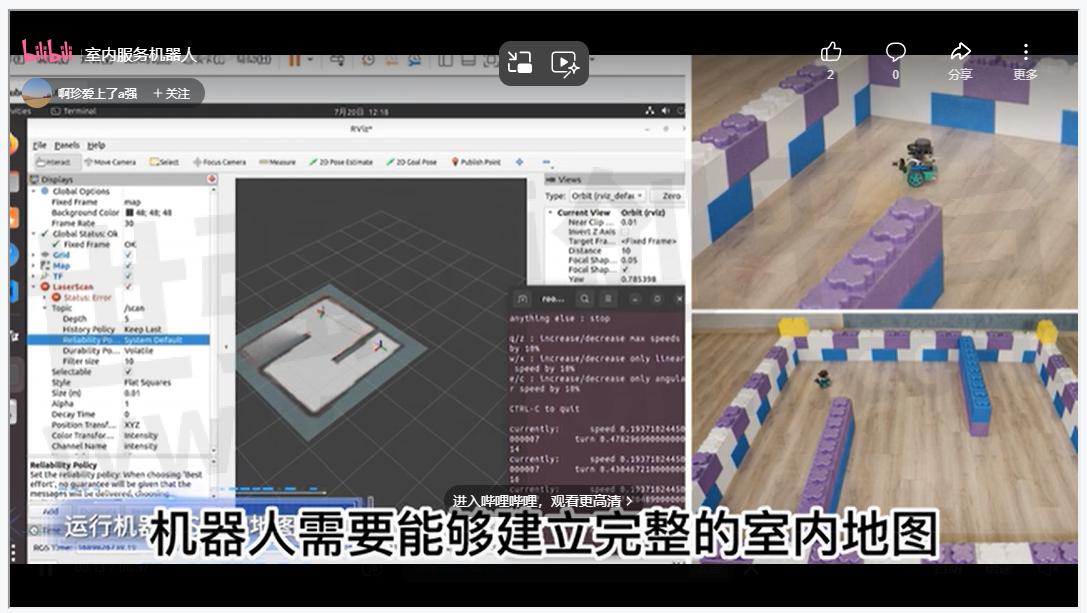
建图过程中可以在同一网段下的PC端打开rviz2,添加Map和TF等显示项,查看建图效果。
在建图时,还需要新开一个终端用于控制小车运动,以建立完整的地图(建议放慢速度,注意不要撞到东西)。
建图完成之后,保存地图到当前的路径下,保存完成后可以把建图节点关掉。
导航模块
NodeHub中“环境感知”栏目中Nav2移动机器人自主导航接收激光雷达的激光数据与底盘的消息并读取已保存的地图,规划出机器人运动到指定位置的路线。
由于建图模块保存地图时已安装过nav2功能包,此处无需再安装。
启动导航节点前建议重启激光雷达节点与底盘节点。
导航节点的接口及参数调整方式可参考NAV2调参说明。
启动该Node的命令为:
可视化导航过程:
导航启动后,机器人最初不知道自己在哪里。默认情况下,Nav2会等待用户给机器人一个大致的起始位置。在地图加载完成之后,点击Rviz2中的”2D Pose Estimate” 按钮,在地图上机器人预估的位置处点击来设置机器人初始位置。通过激光雷达扫描到的障碍物与地图上的障碍物是否吻合判断初始位置是否准确,大致匹配即可。确定初始位置之后,点击“2D Goal Pose”按钮,在地图上选择导航目标点,即可开始自主导航。
垃圾检测模块
NodeHub“环境感知”栏目中2D垃圾检测接收摄像头发布的图像信息,使用PPYOLO模型检测出图像中的垃圾。
查看《2D垃圾检测》Node可知:
该Node订阅话题/hbmem_img,类型为hbm_img_msgs/msg/HbmMsg1080P,此话题与摄像头模块发布的话题一致,可以获取摄像头发布的图像数据。
发布话题/ai_msg_mono2d_trash_detetion,其中包含了检测到的垃圾在图像中的位置。
启动脚本中包含了摄像头节点的启动(支持USB与MIPI两类摄像头,此处为后者),所以无需再另外启动摄像头。

人体检测模块
NodeHub“人机交互”栏目中人体与骨骼关键点检测接收摄像头发布的图像信息,使用fasterRcnn模型检测出人体以及人体骨骼关键点。
查看《人体骨骼关键点》Node可知:
该Node订阅话题/hbmem_img,类型为hbm_img_msgs/msg/HbmMsg1080P,此话题与摄像头模块发布的话题一致,可以获取摄像头发布的图像数据。
发布话题/hobot_mono2d_body_detection,其中包含人体骨骼关键点在图像中的位置。
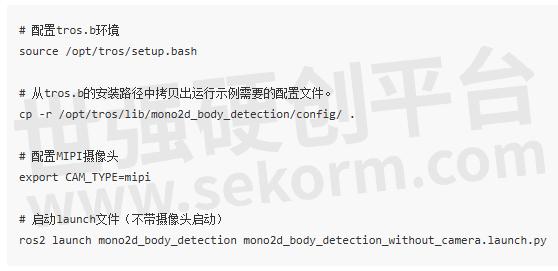
由于摄像头节点在垃圾检测模块中已经打开,所以此处启动人体检测模块时,选择不带摄像头启动的脚本。
至此,室内服务机器人Demo已经搭建完成。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由雪飘梦飞转载自D-Robotics官网,原文标题为:室内服务机器人,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

在RDK的系统运行实现视觉惯性里程计应用案例,实现机器人定位
视觉惯性里程计(Visual Inertial Odometry,VIO)是融合相机与惯性测量单元(Inertial Measurement Unit,IMU)数据实现机器人定位的算法。VIO定位算法具有成本低、适用环境广等优点,在室外环境下能够有效弥补卫星定位中遮挡、多路径干扰等失效场景。优秀、鲁棒的VIO算法是实现室外高精度导航定位的关键。
设计经验 发布时间 : 2024-11-23

RDK X3设置语音识别算法应用案例,助力智能家居实现语音控制功能
地平线智能语音算法采用本地离线模式,订阅音频数据后送给BPU处理,然后发布唤醒、命令词识别、声源定位DOA角度信息以及语音ASR识别结果等消息。智能语音功能的实现对应于TogetheROS.Bot的hobot_audio package,适用于地平线RDK配套的麦克风阵列。
设计经验 发布时间 : 2024-11-23

智能语音聊天机器人功能及使用指南
智能语音聊天机器人通过识别用户语音,调用ChatGPT API获取答复并播放,实现语音聊天。需地平线RDK、ChatGPT API Key及音频板等物料。准备、组装后,安装功能包并运行,配置音频和ChatGPT API Key。常见问题包括设备连接、音频驱动、配置文件及网络访问等。
设计经验 发布时间 : 2024-10-18

兆龙互连(ZHAOLONG)工业与医疗电缆选型指南
描述- 公司创立近 30 年来,默默耕耘,点滴积累,步步前行。核心技术和产品开发紧跟以太网技术变革。产品出口全球 100 多个国家和地区,目前产品应用于 5G 通信、云计算、数据中心、企业网、工业自动化、车联网、智能家居、特种应用(医疗、风能、船用、轨交、光伏、核电、航空航天)等各个领域。
型号- LF-DATA LIYY T,CHAIN FD 432 CY,SC 205 FEP,RVVYP,CANBUS FD-TP,ETHERNET SPE,ETHERNET MARINE CAT5E,CHAIN FD 837 CP,ETHERNET FLEX CAT6,MC 412CY,MC 416CY,CHAIN FD 431,SC 250 PFA,CHAIN FD 430,RVV,MC 416CY-TP,ETHERNET CAT5E,ETHERNET FLEX CAT5E,ETHERNET CAT6A,KNX/EIB,ETHERNET FLEX CAT,CHAIN FD 832 CP,CHAIN FD 431 CY,CHAIN FD 837 P,RVVY,DEVICENET FD,ETHERNET MARINE CAT6,CHAIN FD 403,ETHERNET MARINE CAT7,CHAIN FD 837 CP-TP,LF-DATA LIYCY-T,LF-DATA LIYCY-CY-T,CHAIN FD 431 TP,CANBUS FD,CHAIN FD 431 CY-TP,CHAIN FD 440,CHAIN FD 730 P-TP,RS-485,ETHERNET CC-LINK IE,LF-DATA LI2YCY-T,DEVICENET,MC 710P,CHAIN FD 730 CP,H05V-K,ETHERNET MARINE CAT7A,H07-K,RV,ETHERNET FD CAT6,LF-DATA LIYY,ROBOTIC FD 938 CY,PROFIBUS-PA,CHAIN FD 430 CY-TP,ROBOTIC FD 930 CP,HR10A-7P-6S,ETHERNET MARINE SWB CAT5E,MC 411CY,CHAIN FD 430 TP,CHAIN FD 837 P-TP,MC 710CP,MC 712CP,ETHERNET MARINE SWB CAT6A,SC 105 PVC,CC-LINK,MC 105 PVC,ETHERNET MARINE SWB CAT7,RS-485 FD,MC 125 XLPO,CHAIN FD 730 P,RVVP,ETHERNET MARINE SWB CAT6,CHAIN FD 440 TP,CHAIN FD 430 C,PROFIBUS-DP,CHAIN FD 730 CP-TP,H03VV-F,ETHERNET FD CAT5E,PROFIBUS-DPFD,CC-LINK FD,ETHERNET CAT8,CANBUS TP,ETHERNET CAT7,MC 410,LF-DATA LIYCY,MC 411,ROBOTIC FD 930 CP-TP,ETHERNET CAT7A,ROBOTIC FD 938 CY-TP,MC 410CY,SC 125 XLPO,LF-DATA LI2YCY-PIMF,LF-DATA LI2YCYV-T,H05VV-F,CHAIN FD 732 CP

铭普光磁贴片变压器选型表
贴片变压器产品OCL范围为100~350uH,CWW有35pF、45pF可供选择,DCR 在1.2Ω~4.5Ω,POE功率BT有30W和90W,传输速率在1G~10G,工作温度在'-40°C~85°C,应用于数据中心,光纤接入网,5G承载网,终端通讯设备、汽车电子,智能机器人,智能家居,新能源,物联网及工业互联网等。
|
产品型号
|
品类
|
OCL(uH)(Min) @100KHz.0.1V
|
CWW(pF)(Max) @100KHz,0.1V
|
DCR (Ω)(Max)
|
传输速率
|
HI-POT (Vrms)
|
工作温度(℃)
|
|
SA050S00
|
贴片变压器
|
240uH
|
35pF
|
3.0Ω
|
1G
|
1500Vrms
|
-40°C~85°C
|
选型表 - 铭普光磁 立即选型

艾拉比旗下移动设备管理品牌Easycontrol将携设备管理及OTA方案亮相国际智能安防展!
6月19日-21日,2024深圳国际智能安防展览会ISE即将在深圳国际会展中心(宝安馆)开幕。“智慧AI,赋能安防”,展会期间,艾拉比旗下移动设备管理品牌Easycontrol将携设备管理及OTA方案亮相8号展馆A656号展位,与行业客户共同探讨、分享安防领域终端设备解决方案的应用。
原厂动态 发布时间 : 2024-06-27

航顺芯片携手云汉芯城深度战略合作,助力半导体国产化进程
2022年7月15日,航顺芯片、云汉芯城深度战略合作签约仪式在深圳平安金融中心云汉会客厅圆满举行。签署深度战略合作协议,约定双方将在产品技术、数据库资源、应用选型等方面展开更为深入的交流合作,携手为半导体国产化的腾飞贡献力量。
原厂动态 发布时间 : 2022-07-21

基于RDK X3的机械臂物体拾取操作实例
本文介绍RDK X3该功能包接收用户选择方块数字的请求,通过yolov5检测目标,在Z轴距离确定的情况下解算出物体的三维坐标,并请求仿真机械臂控制节点夹取物体的应用实例。
设计经验 发布时间 : 2024-10-28

D-Robotics 人形机器人自动踢球控制
本文介绍了人形机器人自动踢球控制的设计方案及应用。该功能包通过接收物体识别节点的消息,控制机器人自动踢球。
设计经验 发布时间 : 2024-11-23

基于NodeHub智能机器人应用中心是深度学习巡线小车实现示例
视觉巡线Demo基于纯视觉的方法实现赛车在赛道内运动,其中赛道中间有引导线辅助赛车保持在赛道内。NodeHub是地平线为广大机器人开发者提供的“智能机器人应用中心”,该应用中心包含多个类别不同功能的开源Node,能够快速安装和使用,通过串联不同的Node可以完成对三大模块的实现。
设计经验 发布时间 : 2024-11-07

NodeHub快速入门
NodeHub是地平线为机器人爱好者打造的智能机器人应用中心,旨在以更加简单、高效、开放的方式协助机器人爱好者开发自己的智能机器人。
技术探讨 发布时间 : 2024-10-30

在RDK X3体验Cartographer激光雷达SLAM技术,实时获取较高精度的地图
本功能所使用的Cartographer是google推出的一套基于图优化的SLAM算法,可以实现机器人在二维或三维条件下的定位及建图功能,这套算法的主要设计目的是满足机器人在计算资源有限的情况下,依然可以实时获取较高精度的地图。该功能支持机器人实物和Gazebo仿真两种体验方式。
设计经验 发布时间 : 2024-11-19

多模态感知仿生机械手项目案例
本项目提供了一款五指仿生机器手,其仿照人手的外观与自由度,使其能够作为人形机器人的末端执行器,完成人手所能完成的任务。
应用方案 发布时间 : 2024-10-29

双机械臂四转四驱机器人设计与实现
该研究设计了一种创新的双机械臂四转四驱机器人,旨在突破传统轮式机器人的限制。该机器人底盘采用四转四驱设计,显著提升了灵活性和负载能力,使其能够在复杂环境中精确移动和执行任务。双机械臂系统使机器人能够高效与现实生活互动,完成复杂任务。
应用方案 发布时间 : 2024-10-29

基于RDK X3的chat robot应用示例,实现用户和机器人语音聊天功能
智能语音聊天机器人识别用户语音内容,然后调用OpenAI API获取答复,最后将该答复播放出来,实现用户和机器人语音聊天功能。
设计经验 发布时间 : 2024-11-18

电子商城

服务
提供稳态、瞬态、热传导、对流散热、热辐射、热接触、和液冷等热仿真分析,通过FloTHERM软件帮助工程师在产品设计初期创建虚拟模型,对多种系统设计方案进行评估,识别潜在散热风险。
实验室地址: 深圳 提交需求>
使用FloTHERM和Smart CFD软件,提供前期热仿真模拟、结构设计调整建议、中期样品测试和后期生产供应的一站式服务,热仿真技术团队专业指导。
实验室地址: 深圳 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论