人形机器人物体抓取实例



功能介绍
该功能包通过接收物体识别节点的消息,控制机器人抓取物体。
使用方法
准备工作
1. 具备TonyPi机器人,包含机器人本体、相机及RDK套件,并且能够正常运行。
2. 具备小球等相关道具。
编译与运行
1. 编译
启动机器人后,通过终端SSH或者VNC连接机器人,打开终端拉取相应代码并编译安装。
# 拉取人形机器人SDK并安装
mkdir -p /home/pi && cd /home/pi
# RDK X5
git clone https://github.com/wunuo1/TonyPi.git -b feature-humble-x5
# RDK X3
git clone https://github.com/wunuo1/TonyPi.git -b feature-foxy-x3
cd /home/pi/TonyPi/HiwonderSDK
pip install .
# 拉取抓取控制代码、控制消息代码、任务拆解代码
mkdir -p ~/tonypi_ws/src && cd ~/tonypi_ws/src
# RDK X5
git clone https://github.com/wunuo1/tonypi_obj_grasp_control.git -b feature-humble-x5
# RDK X3
git clone https://github.com/wunuo1/tonypi_obj_grasp_control.git -b feature-foxy-x3
git clone https://github.com/wunuo1/robot_pick_obj_msg.git
git clone https://github.com/wunuo1/hobot_awareness.git
# 编译
cd ..
source /opt/tros/setup.bash
colcon build
2. 运行抓取/放置功能
source ~/tonypi_ws/install/setup.bash
#固定相对位置的抓取
ros2 launch tonypi_obj_grasp_control target_grasp_control.launch.py task_input:=False fixed_rel_pos:=True target_type:=red_ball task_type:=catch
#固定高度目标抓取
ros2 launch tonypi_obj_grasp_control target_grasp_control.launch.py task_input:=False fixed_rel_pos:=False target_type:=red_ball task_type:=catch
#接收大模型任务进行抓取/放置
ros2 launch tonypi_obj_grasp_control target_grasp_control.launch.py task_input:=True fixed_rel_pos:=False
接口说明
话题
Sub话题
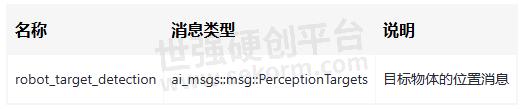
服务
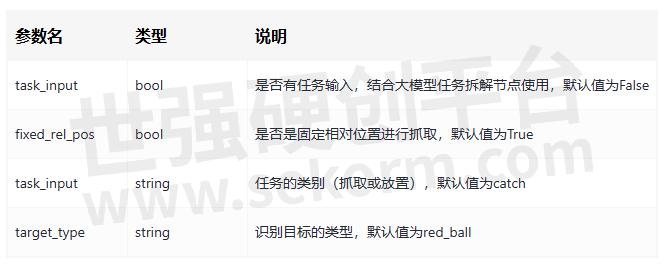
接收请求

参数
- |
- +1 赞 0
- 收藏
- 评论 0
本文由雪飘梦飞转载自D-Robotics官网,原文标题为:人形机器人物体抓取,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

2D垃圾检测应用示例
本Node是基于hobot_dnn开发的2D垃圾目标检测算法,采用PaddlePaddle开源框架, 利用PPYOLO模型进行垃圾检测任务设计和训练。为了达到快速部署的目的,本Node支持配置文件更换垃圾检测模型,开发者可以将更多精力投入在算法模型能力的迭代,减少部署工作量,识别输出的AI信息不仅可以通过话题发布,还可以在Web页面渲染显示。

OriginBot机器人最小功能系统的机器人底盘驱动应用实例
OriginBot是一款智能机器人开源套件,更是一个社区共建的开源项目,旨在让每一位参与者享受机器人开发的乐趣。该项目是OriginBot机器人最小功能系统,该最小系统可接受/cmd_vel指令控制机器人运动并反馈/Odom信息。

基于RDK X3的机械臂物体拾取操作实例
本文介绍RDK X3该功能包接收用户选择方块数字的请求,通过yolov5检测目标,在Z轴距离确定的情况下解算出物体的三维坐标,并请求仿真机械臂控制节点夹取物体的应用实例。

【IC】D-Robotics RDK X5机器人开发者套件,可提供高达10 Tops算力,加速智能化应用快速落地
D-Robotics RDK X5搭载Sunrise 5智能计算芯片,可提供高达10 Tops的算力,是一款面向智能计算与机器人应用的全能开发套件,接口丰富,极致易用,支持Transfomer、RWKV、Occupancy、Stereo Perception等多种复杂模型和最新算法,加速智能化应用快速落地。




智能语音聊天机器人功能及使用指南
智能语音聊天机器人通过识别用户语音,调用ChatGPT API获取答复并播放,实现语音聊天。需地平线RDK、ChatGPT API Key及音频板等物料。准备、组装后,安装功能包并运行,配置音频和ChatGPT API Key。常见问题包括设备连接、音频驱动、配置文件及网络访问等。

乐动激光雷达驱动功能应用示例
乐动激光雷达驱动设计方案介绍,LDLIDAR ROS2驱动,以ROS2标准消息格式发送激光雷达数据。

基于RDK系统的双目深度估计算法示例
双目深度估计算法是使用地平线OpenExplorer在SceneFlow数据集上训练出来的StereoNet模型。算法输入为双目图像数据,分别是左右视图。算法输出为左视图的视差。此示例使用mipi双目相机作为图像数据输入源,利用BPU进行算法推理,发布包含双目图像左图和感知结果的话题消息, 在PC端rviz2上渲染算法结果。

在RDK X5平台上实现Mobile SAM量化部署的分割示例
mono_mobilesam package是基于Mobile SAM量化部署的使用示例。图像数据来源于本地图片回灌和订阅到的image msg。SAM依赖检测框输入进行分割, 并分割检测框中的目标, 无需指定目标的类别信息, 仅需提供框。最终将算法信息通过话题发布, 同时在Web页面渲染可视化。应用场景为结合检测框进行障碍物分割、水渍区域分割等。

于RDK X3设置USB摄像头驱动,实现采集图像数据和发布功能
本项目功能为hobot_usb_cam从USB摄像头采集图像数据,以ROS标准图像消息或者零拷贝(hbmem)图像消息进行发布,供需要使用图像数据的其他模块订阅。

RDK X5平台上CLIP文本图片特征检索应用示例
文本图片特征检索功能介绍CLIP是由OpenAI提出的一种多模态机器学习模型。该模型通过对大规模图像和文本对进行对比学习, 能够同时处理图像和文本, 并将它们映射到一个共享的向量空间中。本示例展示在RDK平台上利用CLIP进行图片管理与文本搜图的功能。

基于旭日X3派的手语翻译系统案例
本手语翻译系统项目主要就是利用python程序录制本地mp3格式的用户音频,并将音频上传到云端语音平台进行实时转写,最后利用GUI库在屏幕上展示转写结果。

适配RDK X3实现Nav2移动机器人自主导航功能实例
自主导航功能贯穿了移动机器人大部分的运动过程,也是智能移动机器人中至关重要的一项基础技能,机器人可以根据地图信息,有效规划出行走的路径,还要通过激光雷达或者摄像头实时识别周围的障碍物,一旦出现意外的障碍,需要立刻做出避障的动作。

电子商城

授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论