在RDK的系统运行实现视觉惯性里程计应用案例,实现机器人定位


功能介绍
视觉惯性里程计(Visual Inertial Odometry,VIO)是融合相机与惯性测量单元(Inertial Measurement Unit,IMU)数据实现机器人定位的算法。VIO定位算法具有成本低、适用环境广等优点,在室外环境下能够有效弥补卫星定位中遮挡、多路径干扰等失效场景。优秀、鲁棒的VIO算法是实现室外高精度导航定位的关键。
代码仓库:https://github.com/HorizonRDK/hobot_vio.git
物料清单

使用方法
准备工作
在体验之前,需要具备以下基本条件:
1. 地平线RDK已烧录好地平线提供的Ubuntu 20.04系统镜像
2. 地平线RDK已安装
3. realsense连接到RDK X3 USB 3.0接口
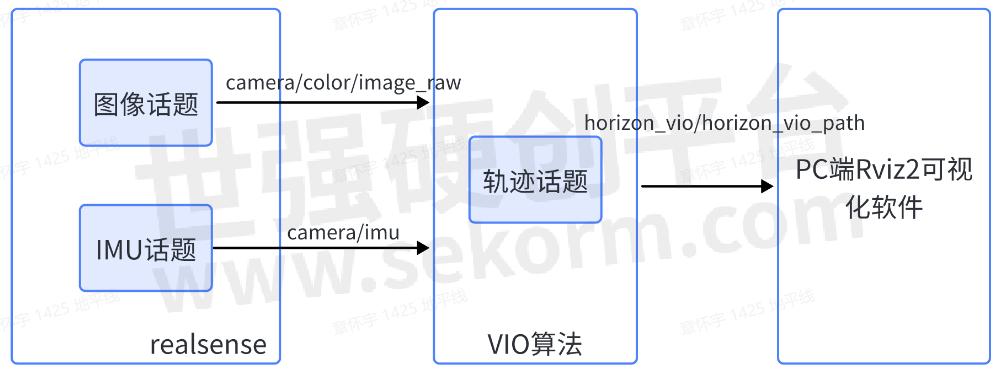
算法订阅realsense相机的图像和IMU数据作为算法的输入,经过计算得到相机的轨迹信息, 并通过ROS2的话题机制发布相机的运动轨迹,轨迹结果可在PC的rviz2软件查看。

硬件连接
Realsense与RDK X3连接方式如下图:

1. 安装功能包
启动机器人后,通过终端或者VNC连接机器人,复制如下命令在RDK的系统上运行,完成相关Node的安装。
tros foxy版本

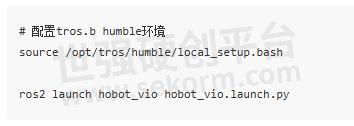
tros humble版本

2. 运行VIO功能
启动命令,launch文件内包含启动realsense相机和vio算法模块的命令,所以只用运行一个launch文件即可:
tros foxy版本

tros humb版本
程序运行后,会进入等待初始化状态,此时必须相机必须保持静止。

此时相机向前平移一段距离,此时算法检测到相机平移则会完成初始化, 此时相机持续运动,开始视觉与惯性的融合定位过程。

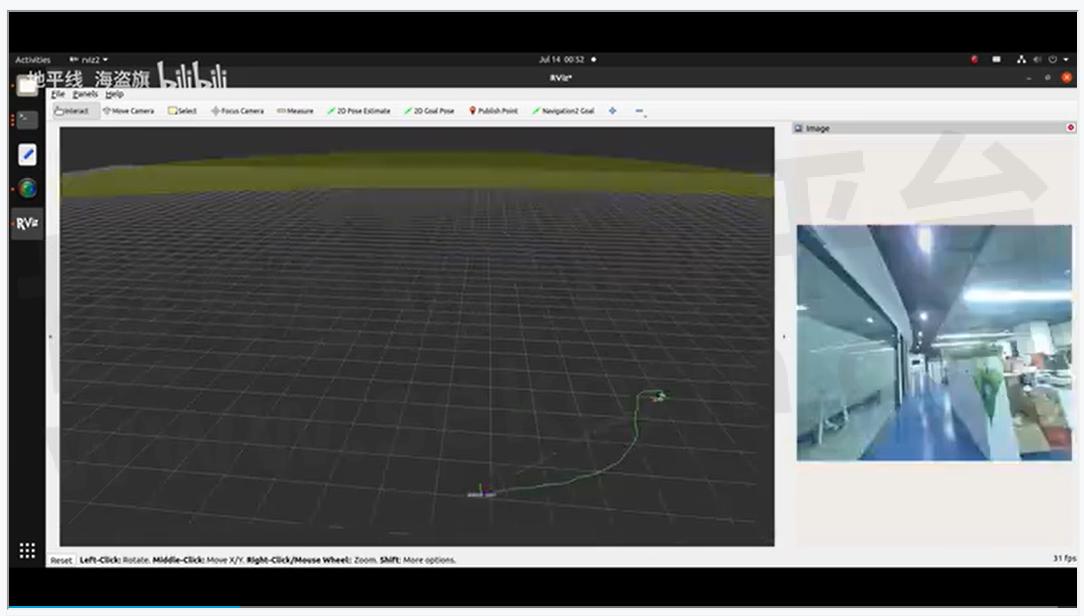
3. 查看效果
这里采用rivz2的方式观察VIO算法的效果,需要在PC上安装ROS2。并且保证PC与RDK X3处于同一网段。rviz2的话题订阅如下图所示,详细的话题解释在“接口说明”一节:

展示效果如下动图所示

接口说明
输入topic

输出topic

常见问题
1、Ubuntu下运行启动命令报错-bash: ros2: command not found 当前终端未设置ROS2环境,执行命令配置环境:
tros foxy版本
tros humble版本
2、如何在RDK上安装realsense的ROS2 package
tros foxy版本
# 以ROS2 Foxy版本为例
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt-get install software-properties-common
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
sudo apt-get update
sudo apt-get install ros-foxy-librealsense2* ros-foxy-realsense2-camera ros-foxy-realsense2-description -y
tros humble版本
# 以ROS2 Humble版本为例
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt-get install software-properties-common
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
sudo apt-get update
sudo apt-get install ros-humble-librealsense2* ros-humble-realsense2-camera ros-humble-realsense2-description -y
3、如何保存VIO算法的轨迹 程序启动之后会自动实时保存轨迹到文件,文件名为 trans_quat_camera_xx.txt。文件内容如下:
1688615183.065757036 -0.081376 -0.040180 0.030833 -0.501420 -0.461689 0.520512 0.514285
......
数据列分别为时间戳、x、y、z坐标、四元数w、x、y、z。
4、VIO注意事项:
a. 单目VIO运行前需要进行初始化,具体见“2.运行VIO功能”这一节。
b. 移动相机过程中尽量平缓。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由雪飘梦飞转载自D-Robotics官网,原文标题为:视觉惯性里程计,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

连接RDK X3操作奥比中光Astro Pro相机驱动示例
基于RDK X3的奥比中光Astro Pro相机驱动操作方案介绍。

基于RDK X3开发板设计并实现的手持slam建图设计
这里使用RDK X3开发板设计并实现了一款SLAM手持建图设备,它使用RDK X3开发板的计算性能,通过激光雷达实现一个纯激光里程计,通过IMU对激光数据进行畸变矫正和对SLAM的姿态矫正,实现一个手持的SLAM建图功能。

RDK平台实现MIPI相机驱动的操作实例
本项目案例为对已适配的MIPI接口摄像头进行配置,并将采集的图像数据以ROS标准图像消息或者零拷贝(hbmem)图像消息进行发布,供需要使用图像数据的其他模块订阅。

基于RDK X3操作思岚激光雷达驱动示例
SLLIDAR ROS2驱动,以ROS2标准消息格式发送激光雷达数据。

RDK X3基于RDK X3的手势识别算法示例
手势识别算法示例订阅包含人手框、人手关键点信息的算法msg,利用BPU进行推理,发布包含手势信息的智能结果msg。手势识别算法集成了人手关键点检测,手势分析等技术,使得计算机能够将人的手势解读为对应指令,可实现手势控制以及手语翻译等功能,主要应用于智能家居,智能座舱、智能穿戴设备等领域。

YDLIADAR激光雷达驱动应用实例
介绍YDLIADAR激光雷达驱动的方案与技术要求,YDLIDAR ROS2驱动,以ROS2标准消息格式发送激光雷达数据。

基于地平线RDK模型YOLOv5s深度学习的方法进行赛道障碍物检测应用实例
该功能为基于深度学习的方法识别赛道中的障碍物,使用模型为YOLOv5s。地平线RDK通过摄像头获取小车前方环境数据,图像数据通过训练好的YOLO模型进行推理得到障碍物的图像坐标值并发布。

基于RDK平台的YOLOv10目标检测算法示例
YOLO功能介绍YOLO目标检测算法示例使用图片作为输入,利用BPU进行算法推理,发布包含目标类别和检测框的算法msg。YOLO目标检测算法示例使用图片作为输入,利用BPU进行算法推理,发布包含目标类别和检测框的算法msg。目前支持yolov2、yolov3、yolov5、yolov5x四个版本。

基于RDK X3 & Module的性能检测软件使用示例
Performance Node该应用基于Web网页打造,无论是什么品牌的电脑和手机,只需要在浏览器访问即可。

多模态感知仿生机械手项目案例
本项目提供了一款五指仿生机器手,其仿照人手的外观与自由度,使其能够作为人形机器人的末端执行器,完成人手所能完成的任务。

智能语音聊天机器人功能及使用指南
智能语音聊天机器人通过识别用户语音,调用ChatGPT API获取答复并播放,实现语音聊天。需地平线RDK、ChatGPT API Key及音频板等物料。准备、组装后,安装功能包并运行,配置音频和ChatGPT API Key。常见问题包括设备连接、音频驱动、配置文件及网络访问等。

2D垃圾检测应用示例
本Node是基于hobot_dnn开发的2D垃圾目标检测算法,采用PaddlePaddle开源框架, 利用PPYOLO模型进行垃圾检测任务设计和训练。为了达到快速部署的目的,本Node支持配置文件更换垃圾检测模型,开发者可以将更多精力投入在算法模型能力的迭代,减少部署工作量,识别输出的AI信息不仅可以通过话题发布,还可以在Web页面渲染显示。

RDK X3 机械臂捡垃圾经验分享
hobot_arm package 是基于 mono2d_trash_detection package 开发的2D垃圾目标检测+机械臂抓取的应用示例。在地平线的旭日X3派上利用BPU进行模型推理获得感知结果,利用幻尔机械臂作为下位机,进行垃圾抓取的示例。

基于RDK X3实现的语言大模型操作实例
hobot_llm是地平线RDK平台集成的端侧Large Language Model (LLM) Node,用户可在端侧体验LLM。目前提供两种体验方式,一种直接终端输入文本聊天体验,一种订阅文本消息,然后将结果以文本方式发布出去。

OriginBot机器人最小功能系统的机器人底盘驱动应用实例
OriginBot是一款智能机器人开源套件,更是一个社区共建的开源项目,旨在让每一位参与者享受机器人开发的乐趣。该项目是OriginBot机器人最小功能系统,该最小系统可接受/cmd_vel指令控制机器人运动并反馈/Odom信息。

电子商城

授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论