亚博智能RDK X3 ROBOT机器人项目实例,实现RKD X3 ROBOT的基本运动控制和位姿反馈



功能介绍
亚博智能RKD X3 ROBOT是一款面向机器人开发者和教育生态的智能机器人开发套件。该套件以旭日X3派为核心运算单元,以TogetherROS.Bot为核心机器人操作系统,集成成了建图、导航、人体跟随、手势识别等功能。本项目为亚博智能RKD X3 ROBOT机器人最小功能系统,该系统能够实现RKD X3 ROBOT的基本运动控制和位姿反馈。该项目包含以下三个功能包:
yahboom_sunrise_robot_lib:负责与MCU的基础通信以及命令转换
yahboomcar_base_node:负责更新机器人的Odom和tf信息
yahboomcar_description:负责描述机器人机械机构信息
yahboomcar_bringup:负责机器人的初始化,订阅运动控制话题、发布机器人状态描述话题和IMU信息
物料清单
使用方法
准备工作
参考亚博智能RKD X3 ROBOT组装视频和文档,完成机器人的硬件组装。
安装
通过MobaXterm或者其他终端软件连接机器人
点击NodeHub OriginBot项目右上角快速部署,复制如下命令在RDK的终端中运行,完成人亚博智能RKD X3 ROBOT机器人最小系统安装。

运行
启动机器人
在终端中输入:

运行成功后可看到如下提示
root@ubuntu:~# ros2 launch yahboomcar_bringup yahboomcar_nodehub_bringup_launch.py
[INFO] [launch]: All log files can be found below /root/.ros/log/2023-10-07-15-48-46-154585-ubuntu-4064
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [Mcnamu_driver-1]: process started with pid [4625]
[INFO] [base_node-2]: process started with pid [4627]
[INFO] [imu_filter_madgwick_node-3]: process started with pid [4629]
[INFO] [ekf_node-4]: process started with pid [4631]
[INFO] [joint_state_publisher-5]: process started with pid [4633]
[INFO] [robot_state_publisher-6]: process started with pid [4635]
[INFO] [static_transform_publisher-7]: process started with pid [4637]
[imu_filter_madgwick_node-3] [INFO] [1696664928.206501590] [imu_filter_madgwick]: Starting ImuFilter
[imu_filter_madgwick_node-3] [INFO] [1696664928.222764213] [imu_filter_madgwick]: Using dt computed from messags
[imu_filter_madgwick_node-3] [INFO] [1696664928.222977621] [imu_filter_madgwick]: The gravity vector is kept in.
[imu_filter_madgwick_node-3] [INFO] [1696664928.251886613] [imu_filter_madgwick]: Imu filter gain set to 0.10000
[imu_filter_madgwick_node-3] [INFO] [1696664928.252147777] [imu_filter_madgwick]: Gyro drift bias set to 0.00000
[imu_filter_madgwick_node-3] [INFO] [1696664928.252259252] [imu_filter_madgwick]: Magnetometer bias values: 0.00
[static_transform_publisher-7] [INFO] [1696664928.286630944] [static_transform_publisher_lRrC5ZXgWzegDUvw]: Spi'
[robot_state_publisher-6] Parsing robot urdf xml string.
[robot_state_publisher-6] The root link base_link has an inertia specified in the URDF, but KDL does not suppor.
[robot_state_publisher-6] Link camera2_link had 0 children
[robot_state_publisher-6] Link camera_link had 0 children
[robot_state_publisher-6] Link imu_link had 0 children
[robot_state_publisher-6] Link left_back_wheel had 0 children
[robot_state_publisher-6] Link left_front_wheel had 0 children
[robot_state_publisher-6] Link lidar_link had 0 children
[robot_state_publisher-6] Link right_back_wheel had 0 children
[robot_state_publisher-6] Link right_front_wheel had 0 children
[robot_state_publisher-6] [INFO] [1696664928.460429490] [robot_state_publisher]: got segment base_link
[robot_state_publisher-6] [INFO] [1696664928.461156350] [robot_state_publisher]: got segment camera2_link
[robot_state_publisher-6] [INFO] [1696664928.461358672] [robot_state_publisher]: got segment camera_link
[robot_state_publisher-6] [INFO] [1696664928.461447143] [robot_state_publisher]: got segment imu_link
[robot_state_publisher-6] [INFO] [1696664928.461507486] [robot_state_publisher]: got segment left_back_wheel
[robot_state_publisher-6] [INFO] [1696664928.461565078] [robot_state_publisher]: got segment left_front_wheel
[robot_state_publisher-6] [INFO] [1696664928.461622045] [robot_state_publisher]: got segment lidar_link
[robot_state_publisher-6] [INFO] [1696664928.461675970] [robot_state_publisher]: got segment right_back_wheel
[robot_state_publisher-6] [INFO] [1696664928.461731520] [robot_state_publisher]: got segment right_front_wheel
[ekf_node-4] X acceleration is being measured from IMU; X velocity control input is disabled
[joint_state_publisher-5] [INFO] [1696664930.805215712] [joint_state_publisher]: Waiting for robot_description .
[imu_filter_madgwick_node-3] [INFO] [1696664930.874444424] [imu_filter_madgwick]: First IMU message received.
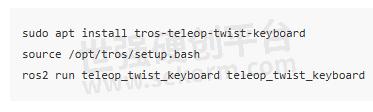
键盘控制机器人
在另一个终端中运行如下指令打开键盘控制功能:
运行成功后出现以下提示
This node takes keypresses from the keyboard and publishes them
as Twist messages. It works best with a US keyboard layout.
---------------------------
Moving around:
u i o
j k l
m , .
For Holonomic mode (strafing), hold down the shift key:
---------------------------
U I O
J K L
M < >
t : up (+z)
b : down (-z)
anything else : stop
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
CTRL-C to quit
currently: speed 0.5 turn 1.0
根据提示使用键盘对应按键控制机器人运动。
接口
说明话题
订阅话题

发布话题

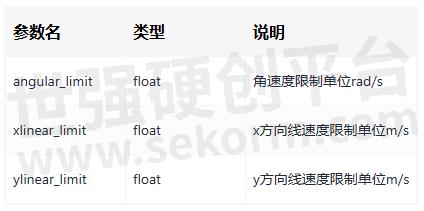
参数
常见问题
暂无。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由雪飘梦飞转载自D-Robotics官网,原文标题为:亚博智能RDK X3 ROBOT机器人,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

基于RDK X3的机械臂物体拾取操作实例
本文介绍RDK X3该功能包接收用户选择方块数字的请求,通过yolov5检测目标,在Z轴距离确定的情况下解算出物体的三维坐标,并请求仿真机械臂控制节点夹取物体的应用实例。

智能语音聊天机器人功能及使用指南
智能语音聊天机器人通过识别用户语音,调用ChatGPT API获取答复并播放,实现语音聊天。需地平线RDK、ChatGPT API Key及音频板等物料。准备、组装后,安装功能包并运行,配置音频和ChatGPT API Key。常见问题包括设备连接、音频驱动、配置文件及网络访问等。

2D垃圾检测应用示例
本Node是基于hobot_dnn开发的2D垃圾目标检测算法,采用PaddlePaddle开源框架, 利用PPYOLO模型进行垃圾检测任务设计和训练。为了达到快速部署的目的,本Node支持配置文件更换垃圾检测模型,开发者可以将更多精力投入在算法模型能力的迭代,减少部署工作量,识别输出的AI信息不仅可以通过话题发布,还可以在Web页面渲染显示。

使用旭日X3派控制大型六足蜘蛛应用实例
本文为大型六足蜘蛛机器人设计方案介绍。经过测试,地平线旭日X3派机器运行效果和JETSON TX1一样顺滑!5Tops端侧推理与4核ARM A53处理能力,可同时多路Camera Sensor的输入并支持H.264/H.265编解码。

使用旭日X3派进行运动控制的手势控制X Car小车应用示例
本方案为使用旭日X3派进行运动控制实现的手势控制X Car小车设计。

OriginBot机器人最小功能系统的机器人底盘驱动应用实例
OriginBot是一款智能机器人开源套件,更是一个社区共建的开源项目,旨在让每一位参与者享受机器人开发的乐趣。该项目是OriginBot机器人最小功能系统,该最小系统可接受/cmd_vel指令控制机器人运动并反馈/Odom信息。

基于旭日X3派的手语翻译系统案例
本手语翻译系统项目主要就是利用python程序录制本地mp3格式的用户音频,并将音频上传到云端语音平台进行实时转写,最后利用GUI库在屏幕上展示转写结果。

多模态感知仿生机械手项目案例
本项目提供了一款五指仿生机器手,其仿照人手的外观与自由度,使其能够作为人形机器人的末端执行器,完成人手所能完成的任务。

乐动激光雷达驱动功能应用示例
乐动激光雷达驱动设计方案介绍,LDLIDAR ROS2驱动,以ROS2标准消息格式发送激光雷达数据。

NodeHub快速入门示例:小海龟绘画
NodeHub快速入门示例,通过键盘控制小乌龟进行绘画。

地平线RDK实现智能循线机器人应用示例
巡线任务,即机器人小车能够自主跟着一条引导线向前运行。地平线RDK通过摄像头获取小车前方环境数据,图像数据通过训练好的CNN模型进行推理得到引导线的坐标值,然后依据一定的控制策略计算小车的运动方式,通过UART向小车下发运动控制指令实现整个系统的闭环控制。

于RDK X3设置USB摄像头驱动,实现采集图像数据和发布功能
本项目功能为hobot_usb_cam从USB摄像头采集图像数据,以ROS标准图像消息或者零拷贝(hbmem)图像消息进行发布,供需要使用图像数据的其他模块订阅。

RDK X3 机械臂捡垃圾经验分享
hobot_arm package 是基于 mono2d_trash_detection package 开发的2D垃圾目标检测+机械臂抓取的应用示例。在地平线的旭日X3派上利用BPU进行模型推理获得感知结果,利用幻尔机械臂作为下位机,进行垃圾抓取的示例。

双机械臂四转四驱机器人设计与实现
该研究设计了一种创新的双机械臂四转四驱机器人,旨在突破传统轮式机器人的限制。该机器人底盘采用四转四驱设计,显著提升了灵活性和负载能力,使其能够在复杂环境中精确移动和执行任务。双机械臂系统使机器人能够高效与现实生活互动,完成复杂任务。

适配RDK X3实现Nav2移动机器人自主导航功能实例
自主导航功能贯穿了移动机器人大部分的运动过程,也是智能移动机器人中至关重要的一项基础技能,机器人可以根据地图信息,有效规划出行走的路径,还要通过激光雷达或者摄像头实时识别周围的障碍物,一旦出现意外的障碍,需要立刻做出避障的动作。

电子商城

授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论