【产品】uSkin三轴触觉传感器模块,对过载具有高度弹性,适用于机器人手和手爪


XELA Robotics推出了uSkin三轴触觉传感器模块,有5种不同的形状和尺寸。其4x6模型由16个高密度、3轴触觉传感器组成。uSkin的厚度仅为5.5毫米,谨慎而有效地增加了人的触觉。通常需要对集成进行大量修改,其他机器人传感器又大又复杂。XELA Robotics的uSkin旨在通过其紧凑、简单的设计来缓解这些压力,只需最少的空间和布线。
传感器型号
传感器有5种不同的形状和尺寸

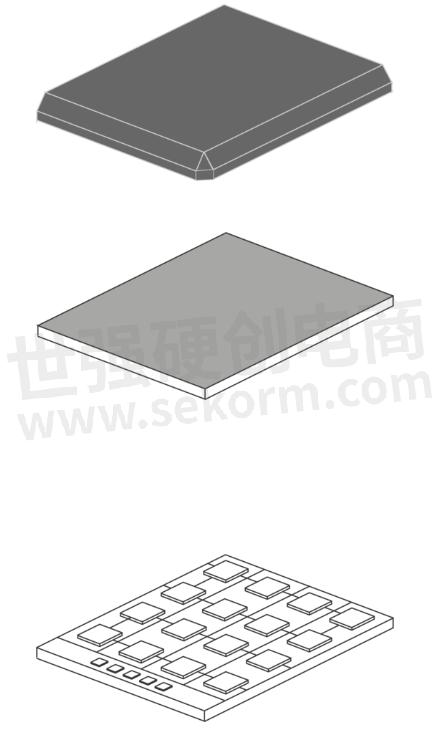
传感器构造
外壳
外壳用于保护目的,但可以针对不同的应用进行修改。
弹性体
柔软的弹性体确保传感器对过载具有高度弹性,这使uSkin非常耐用。
“软皮肤”为传感器添加的另一个功能是能够与机器人解决方案试图抓住的对象保持一致。
芯片
芯片可以识别三维位移。
每个传感器模块都包含许多这样的芯片,每个芯片都可以单独测量三维位移。
XELA uSkin可以很容易地集成到各种机器人手和手爪中, 比如Allegro手和SAKE机器人手爪。
特点
数字输出
大多数传感器都需要各种电缆和大型模数转换硬件。
uSkin已经提供数字输出。只需要几根细线来收集测量值,并且不需要额外的模数转换器。
uSkin利用数字输出为您提供更快、更准确的测量,同时将电噪声和干扰降到最低。
柔软耐用
uSkin是一种软传感器,能够在不损坏易碎物体的情况下处理易碎物体。可以可靠地抓取和操纵不同大小、形状、硬度和重量的物体。
uSkin的柔软性还确保传感器对过载具有高度弹性,使uSkin非常耐用。
易于集成
典型的机器人传感器很笨重,需要大量定制才能集成。XELA Robotics提供可轻松集成且不需要任何专有连接器的触觉皮肤传感器。传感器有多种选择,可以简单地粘在或固定在支架上。
合理的价格
将uSkin的价格与竞争对手进行比较,产品在不影响性能的情况下更加实惠。
类型:三轴触觉传感器模块
测量:4x6 taxels
传感器数量:24
尺寸:31x51.5x5.5毫米
软皮肤
连接仅需7根线
类型:三轴触觉传感器模块
尺寸:4x4 taxels
传感器数量:16
尺寸:24x28x5.5毫米
软皮肤
连接仅需5根线
类型:三轴触觉传感器模块
尺寸:2x2 taxels
传感器数量:4
尺寸:10.5x10.5x5.5毫米
软皮肤
仅需4根线即可连接
类型:三轴触觉传感器模块
尺寸:2x1 taxels
传感器数量:2
尺寸:6x10.5x5.5毫米
软皮肤
仅需4根线即可连接
类型:三轴触觉传感器模块
尺寸:1x1 taxels
传感器数量:1
尺寸:5.5x6.4x4.5毫米
软皮肤
仅需4根线即可连接
- |
- +1 赞 0
- 收藏
- 评论 0
本文由叫我大表哥吧翻译自XELA Robotics官网,版权归世强硬创平台所有,非经授权,任何媒体、网站或个人不得转载,授权转载时须注明“来源:世强硬创平台”。
相关推荐

XELA Robotics 接触传感器选型指南
目录- Company profile XELA Overview Tactile Sensors Integration UAI Software
型号- USMU,USCU EALHA,USPR EF2,USPR EWSEGI,USPA 46,USPA 11,USPA 22,USPA 44,USKIN 4X4,USPA 21

专注于触觉传感器研发,日本XELA Robotics授权世强硬创平台代理机器人触觉传感器
2022年10月17日,世强先进(深圳)科技股份有限公司(下称“世强先进”)和为机器人提供人类的触觉——日本XELA Robotics签署战略合作协议,授权世强先进代理其旗下全线产品。

(适用于mbed的XR1922、XR1921、XR1911)Xela机器人触觉传感器-说明手册
描述- 本手册介绍了XELA Robotics触觉传感器(XR1922, XR1921, XR1911)的使用说明。内容包括传感器的物理限制、操作系统要求、编程语言需求、硬件连接方法、微控制器驱动安装步骤、快速硬件测试和数据结构。强调避免过度施力以保护传感器模块,并指出接触几何形状对测量的影响。此外,还提供了如何将传感器与微控制器连接、安装驱动程序以及进行数据采集的详细指南。
型号- XR1921,XR1922,XR1911
XR1922,XR1921,XR1911 XELA Robotics触觉传感器-说明书
描述- 本资料为XELA Robotics触觉传感器(XR1922, XR1921, XR1911)的用户手册。内容包括传感器使用限制、硬件要求、硬件介绍、硬件兼容性、设置与安装、CAN ID和CAN消息解释等。手册详细说明了传感器的连接、配置和数据采集过程,并提供了软件安装和配置的指导。
型号- XR1921,XR1922,XR1911
XR1944用于MBED XELA Robotics触觉传感器-说明书
描述- 本资料为XELA Robotics的XR1944触觉传感器使用手册。手册内容包括传感器使用限制、系统要求、硬件介绍、设置与安装步骤。传感器具有16个感应点,测量3轴皮肤变形,采样率为100Hz。资料详细说明了硬件连接、驱动安装、快速硬件测试以及数据结构。
型号- XR1944

XR1946(原USPA46)、USPR EF2、USPR EWSEGI
描述- XR1946、uSPr eF2、uSPr eWSEGI是XELA Robotics推出的基于霍尔效应的触觉传感器,具备多触点分布式感知、3轴力测量、柔软皮肤、高达83Hz的采样率等特点。产品具有两种灵敏度设置,提供不同的测量范围和分辨率,适用于多种应用场景。
型号- XR1946,USPR EF2,USPR EWSEGI,USPA46

TE Connectivity(泰科)传感器选型指南
目录- Company Profile DIGITAL COMPONENT SENSOR DEVELOPMENT TOOLS FLOW SENSORS FORCE SENSORS HUMIDITY SENSORS LIQUID LEVEL SENSORS PHOTO OPTIC SENSORS PIEZO FILM SENSORS POSITION SENSORS PRESSURE SENSORS RATE AND INERTIAL SENSORS SCANNERS AND SYSTEMS SPEED SENSORS TEMPERATURE SENSORS TORQUE SENSORS ULTRASONIC SENSORS VIBRATION SENSORS WATER LEVEL SENSORS
型号- 7504A,3255A,T500,8011-AR,8011-AP,CD9515,DSD 25,68CM1,FS-90,FS-91,6900,4602,4604,7505A,MS4525DO,DSD 17,TSYS02D,CWW600,D5100,4610,MS8607,EPRB,XP5,805,5903 SERIES,808,89BSD,T400,4630,SDT1,P1200,606M1,PS2011AB,LDTC FAMILY,DSD 40,ELM-4000,3058A,MS5803-01BA,FMT,SIL-3,M7100,700,LS809-31,EGCS-D5,TLH100,4332M3,FTP520,MS54XX,EGCS-D0,ESP 64HD,XL403D,AST46HA,832,FN7110,HSTA,834,EB,PS501,LDM-1000,U86B,DP86,KMXP 1000,52M30,PS2021AB,M905,RVIT-Z,603,LS509-51,ELM-5000,TS318-3B0814,FN4070,H005,PT500,H009,610,RCS01-10,31207B,FTP540,CWW850,PML 1000,LDS309-11N,EPB-PW,EVS722-51,CWW1000,FN9630,GC,FN9635,FLDT1,U7100,FTP530,85F,FN4080,834M1,HTU2X,ARD154,EPB,EGAXT,VS804-21,HC,65210E,EPL,7108A,86A,CLP,AST46SW,HR,MS52XX,KMXP 2000,AST4510,KPSI 730,KPSI 735,FTP560,633,634,7531A,XFTC300,Y12AD,18FR,FTP552,FTP553,FTP554,AST4401,AST4400,AST4520,KPSI 720,U5700,KPSI 600,FN4055,KPSI 601,400,MS5803-30BA,FTP551,31206B,FN9620,DPG,TRUBLUE 255,LL-01,FN7325,DPL,DPN,64B,40A,64C,40B,HTF3000LF,52F,3022,KPSI 750,KMT37,FN3050,TPT,64X,KMT39,9916,53A,AST43LP,ESP 16HD,AST4500,KPSI 500,KPSI 501,KPSI 745,3028,86BSD,8811-01,PM50,KMA36,TSYS01,LT,TSYS02,ATA-2001,KMT36H,P900,LBB,G-SERIES,PM81,FN3030,DSD,3038,DSF,CM-01,DSH,8021-AP,8021-AR,DSL,PM83,CD375,ML,DT1,4020,TSD,6200,DSS,AST46PT,AST44LP,805M1,AST4600,DSY,TSD305,7500A,DC-SE,EGAXT3,4030,LDTC,XPM10,MS4515DO,KPSI 710,PT100,MSP300,AST20HA,XS-C,XS-D,7501A,LL-10,HTU3535PVBM/WIRE,PT101,6100,SSI,HTG351XCH,AST2000H2,KPSI 700,SSR,KPSI 705,TRUBLUE 275,LS304-31,LMM-H04,LMM-H03,FN3148,TSYS,DSD 70,7502A,7514A,P700,APS,4810A,CD1110,KPSI 330,8021-VP,8021-VR,KPSI 335,AST4000,7135A,5905 SERIES,400 SERIES,XFL212R,6000,LVM-110,KMXP 5000,KPSI 320,AST44XX,8711-01,121,FN3002,AST5100,LCS-03,FN3000,CS1120,R36,PCA 375,U5300,RT9,RT8,M3200,7100A,9400,TLH600,CPA150,HS1101LF,M210,AST20SW,KPSI 351,KPSI 353,HTU383X/WIRE,130,IT9000,KPSI 355,AST5300,AST4100,SG,CD1140,XPM4,SK,7101A,SM,FX19,MSP100,SP,EPM-5000,TPT300V,PM101,MSP340,SR,12FR GP,PT9000,AST45XX,KPSI 342,1201F,MT3A,ACH-01,SL-630,M5600,7102A,PT1000,TS,EL20-S458,8011-VP,MS5805,XFU400,MS5803,MP 2000,P981,HSTAR,KPSI 30,HTM2500LF,CS1210,AST5400,E-SERIES,MLP,FN1010,HTU2XF,HM1520LF,TS305-10C50,24FR,TRUBLUE 585,16MS,52,8011-VR,KPSI 27,MS32,KPSI 28,58,MS1451,XPM6,160,AST46XX,ESP 32HD DTC,PT1,161,ACCUSTAR EA,AST4200,PT5,DSH 16,DOG2,FX29,MMX,12FR,ESP 64HD DTC,7104A,TRUBLUE 575,FN2114,US300,9FR,9146-R,GHSE,PTX,85BSD,7105A,MS5837,9216,KMA36A,AST20PT,AST4300,MS1471,9146-T,808M1,U5600,FN2570,CD1050,EPM-4001,XP,82,MS5525DSO,85,86,TRUBLUE 555,FS-01,89,MS5607,FS-02,FS-05,FS-06,ED32I,MS5840,PS2031AB,8032-01,FN2420,R60D,3052A,154BSD,P9000,MS5611,XFC200R,EPIH,ELAF,ESP 32HD,M12,3801A,1620,KMY,65210ES,KMZ,FN2317,M150,AST46DS,11206AC,10FR,PS831,8021-01,EGCS-D1S,KPSI 300DS,1630,820M1,XPC10,TSEV,53AF,140A,SL-900,MS5637,CD1124T,EVS312-11N,MT2,MT3,CS1060,CD1095,832M1,VCS-06,MTA,VCS-04,3700,M5200,FN7080,P105,P101,9022,FS19,7131A,FC22,FC23,4630M12,9034,142A,9038,154N,4801A,9032,LIM-420,9033,5905,GHSER,7132A,LTA,ACCUSTAR IP66,LTB,4630M14,5903,PT8000,P125,TS318-5C50,T600,8102A,LTR,HM1500LF,R30A,GHSER 750-A,HTU21D,8011-01,PS801,700 SERIES,KPSI 380,NDT-1,FS20,FS22,4835A,AST43XX,D-SERIES,FS23,U5200,1201,1200,HPGS 750,FCA7300,AD-101,PS811,VS309-51N,KMXP,11207AC

(USPA 46)XELA机器人触觉传感器-使用手册
描述- 本手册介绍了XELA Robotics触觉传感器的使用说明。内容包括传感器模块的使用限制,如避免过高压力以保护设备;硬件要求,包括PC配置和所需的CAN-USB转换器;硬件介绍,包括传感器模块、微控制器和接口;设置与安装步骤,包括连接硬件和驱动程序安装;以及CAN ID和消息结构的解释,以便用户理解数据传输过程。
型号- USPA 46

【IC】XELA Robotics新品触觉传感器专为机器人手指尖而设计,具有柔软、耐用、弯曲的特点
XELA Robotics最新款触觉传感器是专为机器人手指尖而设计的。每个uSkin Curved有30个触觉晶体管。柔软、耐用和弯曲的设计使得机器人有着更加类似于人的触觉。数字输出能为您提供更快、更精确的测量,同时将电噪声和干扰降到最小。
(USPA 44)XELA机器人触觉传感器-使用手册
描述- 本手册介绍了XELA Robotics触觉传感器的使用说明。内容包括传感器模块的使用限制,硬件组成(包括传感器模块、微控制器和ESD CAN/USB接口),软件安装与配置步骤,以及如何解析CAN ID和消息结构。强调了避免过度施力以保护传感器,并提供了连接硬件、驱动程序和库安装的详细指南。此外,还说明了数据传输过程中的通信协议和数据格式。
型号- USPA 44

XELA Robotics与世强控股的代理协议
描述- In August 2022,XELA Robotics Co., Ltd. And Sekorm Limited signed a INTERNATIONAL DISTRIBUTION AGREEMENT.
(USPA 11,USPA 21,USPA 22)Xela机器人触觉传感器-使用手册
描述- 本手册介绍了XELA Robotics触觉传感器的使用说明,包括硬件连接、安装步骤和软件配置。传感器模块用于测量皮肤变形引起的磁场变化,适用于机器人应用。手册详细说明了传感器模块与微控制器、5-SDA分线板和CAN/USB接口的连接方式,并提供了驱动程序安装指南。此外,还解释了CAN ID和消息结构,以便正确解析传感器数据。
型号- USPA 11,USPA 22,USPA 21

电子商城

服务
可定制无线位移传感器量程范围10~600mm,采用了无线传输方式,可远程自动实时检(监)测位移量值,准确度级别(级):0.2、0.5;内置模块:无线传输模块、供电模块;传输距离L(m):可视距离1000 (Zigbee、 LORA)。
最小起订量: 1pcs 提交需求>
可定制板装式压力传感器支持产品量程从5inch水柱到100 psi气压;数字输出压力传感器压力范围0.5~60inH2O,温度补偿范围-20~85ºС;模拟和数字低压传感器可以直接与微控制器通信,具备多种小型SIP和DIP封装可选择。
提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论