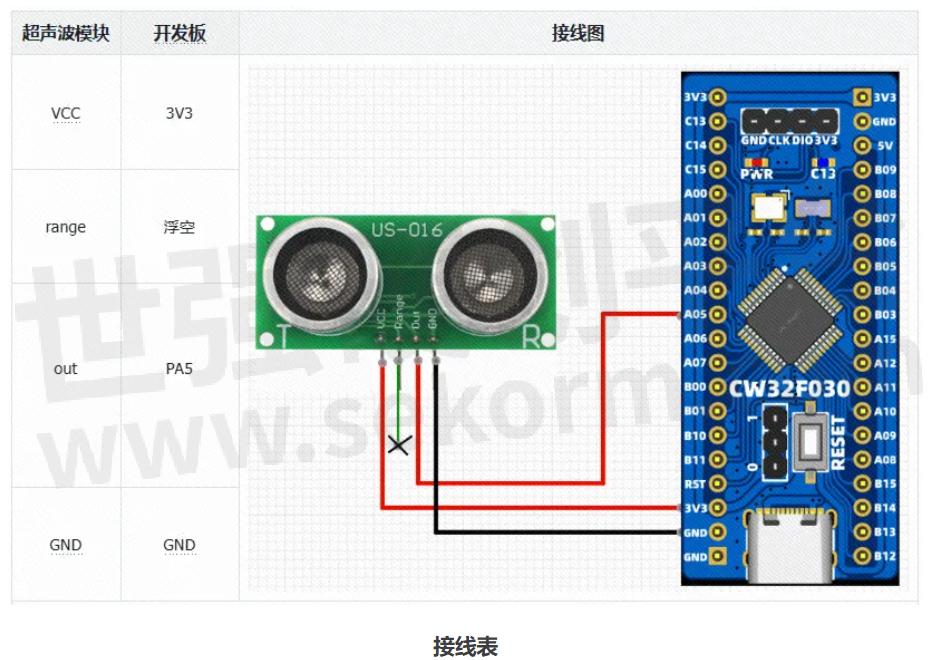
US-016超声波测距传感器移植至CW32F030C8T6开发板上能够判断前方障碍物距离的功能实例


US-016是市场上唯有的一款模拟量输出的超声波测距模块,输出的模拟电压和距离值成正比,可以方便的和其他系统相连,US-016工作稳定可靠。
US-016超声波测距模块可实现2cm~3m的非接触测距功能,供电电压为5V,工作电流为3.8mA,支持模拟电压输出,工作稳定可靠。本模块根据不同应用场景可设置成不同的量程(大测量距离分别为1m和3m);当Range管脚悬空时,量程为3m。US-016能将测量距离转化为模拟电压输出,输出电压值与测量距离成正比。
一 模块来源
模块实物展示:

资料下载链接:
http://pan.baidu.com/s/1c08JuBQ
二 规格参数
工作电压:3.3V-5V
工作电流:3.8MA
感应角度:小于15度
探测距离:2CM-300CM
探测精度:0.3CM+1%
输出方式: 模拟电压
管脚数量:4 Pin
以上信息见厂家资料文件
三移植过程
我们的目标是将例程移植至CW32F030C8T6开发板上【能够判断前方障碍物距离的功能】。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。
3.1查看资料
模块上电后,系统首先判断 Range 引脚的输入电平,根据输入电平状态来设置不同的量程。当 Range 引脚为高电平时,量程为 3m,当 Range 管脚为低电平时,量程为 1m。然后,系统开始连续测距,同时将测距结果通过模拟电压在 Out 管脚输出。当距离变化时,模拟电压也会随之进行变化。模拟电压与测量距离成正比,模拟电压的输出范围是0~Vcc。
当系统量程为 1m 时,测量距离为:L = 1024*Vout/Vcc(mm)。当输出电压为 0V 对应距离为 0m,输出 Vcc 对应为 1.024m。
当系统量程为 3m 时,测量距离为:L = 3096*Vout/Vcc(mm)。 当输出电压为 0V 对应距离为 0m,输出 Vcc 对应为 3.072m。
3.2引脚选择
想要使用ADC,需要确定使用的引脚是否有ADC外设功能。可以通过手册进行查看。在用户手册439页。
这里选择使用PA5的附加ADC功能。

3.3移植至工程
模块工程参考入门手册工程模板
移植步骤中的导入.c和.h文件与【CW32模块使用】DHT11温湿度传感器相同,只是将.c和.h文件更改为bsp_US016.c与bsp_US016.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_US016.c中,编写如下代码。
/** Change Logs:* Date Author Notes* 2024-06-20 LCKFB-LP first version*/#include "bsp_US016.h"#include "stdio.h"//超声波量程 Range接地量程为1 Range接VCC量程为3 浮空量程为3//测试时,Range浮空,故量程为3#define RANGE 0 //=0则量程为3米 =1则量程为1米/******************************************************************* 函 数 名 称:US016_GPIO_Init* 函 数 说 明:US016超声波模块引脚初始化* 函 数 形 参:无* 函 数 返 回:无* 作 者:LC* 备 注:******************************************************************/void US016_GPIO_Init(void){RCC_OUT_ENABLE(); // 使能GPIO时钟RCC_OUT_ADC_ENABLE(); // 使能ADC时钟ANALOG_GPIO_ENABLE(); // PA05设定为模拟输入/* ADC配置 */ADC_InitTypeDef ADC_InitStructure; // ADC初始化结构体ADC_WdtTypeDef ADC_WdtStructure; // ADC看门狗结构体ADC_SingleChTypeDef ADC_SingleChStructure; // ADC单通道转换结构体// 配置ADC初始化结构体ADC_InitStructure.ADC_OpMode = ADC_SingleChOneMode; //单通道单次转换模式ADC_InitStructure.ADC_ClkDiv = ADC_Clk_Div4; // 时钟频率 = PCLK / 4 = 64MHz / 4 = 16MHzADC_InitStructure.ADC_SampleTime = ADC_SampTime5Clk; //5个ADC时钟周期ADC_InitStructure.ADC_VrefSel = ADC_Vref_VDDA; //VDDA参考电压ADC_InitStructure.ADC_InBufEn = ADC_BufDisable; //关闭跟随器ADC_InitStructure.ADC_TsEn = ADC_TsDisable; //关闭内置温度传感器ADC_InitStructure.ADC_DMAEn = ADC_DmaDisable; //不触发DMAADC_InitStructure.ADC_Align = ADC_AlignRight; //ADC转换结果右对齐ADC_InitStructure.ADC_AccEn = ADC_AccDisable; //转换结果累加不使能//ADC模拟看门狗通道初始化ADC_WdtInit(&ADC_WdtStructure);//配置单通道转换模式ADC_SingleChStructure.ADC_DiscardEn = ADC_DiscardNull; // 单通道ADC转换结果溢出保存ADC_SingleChStructure.ADC_Chmux = CHANNEL_OUT_ADC; // 选择ADC转换通道,AIN5:PA05ADC_SingleChStructure.ADC_InitStruct = ADC_InitStructure; // ADC初始化结构体ADC_SingleChStructure.ADC_WdtStruct = ADC_WdtStructure; // ADC看门狗结构体ADC_SingleChOneModeCfg(&ADC_SingleChStructure); // 初始化配置ADC_Enable(); //ADC使能ADC_SoftwareStartConvCmd(ENABLE); //启动ADC转换}/*********************************************************** 函 数 名 称:ADC_GET* 函 数 功 能:读取一次ADC值* 传 入 参 数:无* 函 数 返 回:测量到的值* 作 者:LCKFB* 备 注:**********************************************************/uint32_t ADC_GET(void){ADC_SoftwareStartConvCmd(ENABLE); //启动ADC转换uint32_t adcValue = ADC_GetConversionValue(); // 获取数据return adcValue;}/******************************************************************* 函 数 名 称:Get_ADC_Value* 函 数 说 明:对ADC值进行平均值计算后输出* 函 数 形 参:num采集次数* 函 数 返 回:对应扫描的ADC值* 作 者:LC* 备 注:无******************************************************************/unsigned int Get_ADC_Value(unsigned int num){unsigned int Data=0;int i = 0;for( i = 0; i < num; i++ ){/* 读取ADC常规组数据寄存器 */Data += ADC_GET();}Data = Data / num;return Data;}/******************************************************************* 函 数 名 称:Get_distance* 函 数 说 明:读取测距距离* 函 数 形 参:无* 函 数 返 回:浮点型的测距的距离* 作 者:LC* 备 注:量程为3米时距离公式为:L = (A*3072/4096)*(Vref/Vcc)量程为1米时距离公式为:L = (A*1024/4096)*(Vref/Vcc)Vref 为 ADC 的参考电压,Vcc 为 US-016 的电源电压******************************************************************/float Get_distance(void){float distance = 0;unsigned int d = Get_ADC_Value(50);#if !RANGEdistance = d * 0.75;#elsedistance = d * 0.25;#endifreturn distance;}
在文件bsp_US016.h中,编写如下代码。
/** Change Logs:* Date Author Notes* 2024-06-20 LCKFB-LP first version*/#ifndef _BSP_US016_H_#define _BSP_US016_H_#include "board.h"#define RCC_OUT_ENABLE() __RCC_GPIOA_CLK_ENABLE()#define RCC_OUT_ADC_ENABLE() __RCC_ADC_CLK_ENABLE()#define ANALOG_GPIO_ENABLE() PA05_ANALOG_ENABLE()#define CHANNEL_OUT_ADC ADC_ExInputCH5//采样次数#define SAMPLES 30void US016_GPIO_Init(void);float Get_distance(void);#endif
四移植验证
在自己工程中的main主函数中,编写如下。
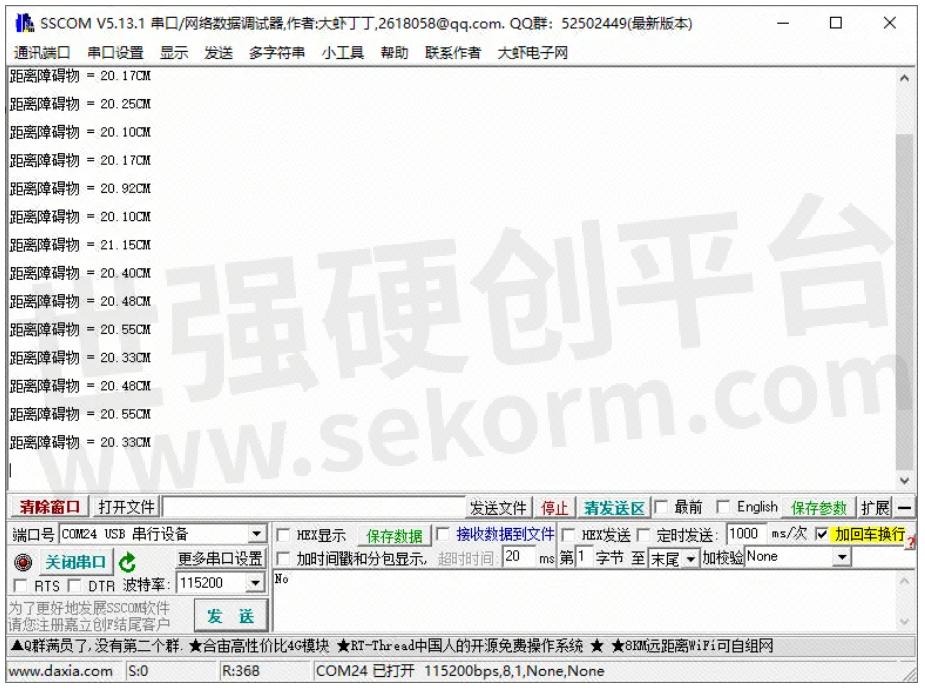
/** Change Logs:* Date Author Notes* 2024-06-20 LCKFB-LP first version*/#include "board.h"#include "stdio.h"#include "bsp_uart.h"#include "bsp_US016.h"int32_t main(void){board_init(); // 开发板初始化uart1_init(115200); // 串口1波特率115200US016_GPIO_Init();printf("Demo Start\r\n");while(1){printf("距离障碍物 = %.2fCM\r\n\n",Get_distance() / 10 );delay_ms(500);}}
移植现象:距离20CM处摆放障碍物,输出换算后的实际距离。
模块移植成功案例代码:
链接:https://pan.baidu.com/s/13U2OqyPx4QOsL0W3Sq4bMg?pwd=LCKF
提取码:LCKF
- |
- +1 赞 0
- 收藏
- 评论 0
本文由唯独你没懂转载自武汉芯源(CW32生态社区公众号),原文标题为:【CW32模块使用】US-016超声波测距传感器,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

先楫半导体HPM 16 位ADC+ENET开发案例:以2MSPS进行采样,通过ENET LWIP TCP方式发送到上位机
本文以先楫半导体 HPM6300 开发板为例介绍以 2MSPS 采样率进行 16 位 ADC 采样并将采样数据通过 ENET LWIP TCP 的方式发送到上位机的应用,ADC 采样使用抢占转换模式、PWM 触发的方式,ENET LWIP TCP 每次发送 1024 个 16 位采样数据。在HPM6300EVK 上进行测试验证,验证结果表明该方案是可行的。

【经验】CW32F030C8T6单片机如何通过看手册配置时钟树
本章简单展示了如何查找手册来配置寄存器,且再次强调库函数的本质就是操作寄存器。单片机都会有一个时钟树,时钟树的图可以在编程手册(不是数据表和内核手册)中找到。部分单片机想要工作在高工作频率下,需要设置flash等待时间并打开缓存和预取指令使能。

基于CW32F030C8T6开发板的MQ-2烟雾检测传感器例程移植案例
MQ-2型烟雾传感器属于二氧化锡半导体气敏材料,属于表面离子式N型半导体。本文的目标是将例程移植至CW32F030C8T6开发板上【判断当前环境状况的功能】。

【应用】基于国产32位MCU芯片CW32F030C8T6的智能门锁方案,主频64MHz,具备低功耗多功能优势
智能门锁集成3D识别算法、接近检测、指纹输入模块,低功耗计算芯片等于一体,解锁快、功耗低、续航久,现武汉芯源推出一款MCU芯片CW32F030C8T6助力于智能门锁设计。

UWB通信新体验,这款板卡不容错过!
作为射频领域的领军企业,Qorvo公司推出了DWM3001CDK设计套件,该套件集成了UWB技术的核心优势,可用于评估硬件性能,支持双向测距(TWR)或时间差到达(TDoA)标签,以及构建实时定位系统(RTLS)。为开发者提供了一个功能强大的开发平台。接下来一起来看看该款开发有哪些令人瞩目的特性吧!

先楫半导体携手劲臣科技发布国产EtherCAT总线多轴伺服驱动器开发套件
先楫半导体携手劲臣科技发布国产EtherCAT总线多轴伺服驱动器开发套件。在JC6E80开发板的方案中,利用EtherCAT的高效通信能力,可以轻松实现多设备的级联,形成完整的工业自动化系统。该方案将EtherCAT多轴伺服驱动器与分支器、10模块等设备级联,构建一个灵活、可扩展的网络架构,适用于多种复杂的自动化应用场景。

【CW32模块使用】VL53L0X激光测距传感器
VL53L0X是ST公司推出的新一代 ToF 激光测距传感器,采用了第二代 FlightSenseTM技术,利用飞行时间(ToF)原理,通过光子的飞行来回时间与光速的计算,实现测距应用。本文的目标是在CW32F030C8T6开发板上能够实现测量距离的功能。首先要获取资料,查看数据手册应如何实现读取数据,再移植至我们的工程。

基于MCU MM32G5330的FlexCAN实现CANopenNode协议栈移植
在现代工业自动化和汽车电子领域,CAN总线以其高可靠性和实时性成为通信的主流选择。而CANopen协议,作为CAN总线上的一种上层通信协议,广泛应用于各种设备间的通信。本文将介绍如何基于灵动MM32G5330的FlexCAN实现CANopenNode协议栈的移植,并使用灵动官方提供的开发板Mini-G5333进行验证。

DHT11温湿度传感器基于CW32F030C8T6开发板上实现读取温湿度的功能操作示例
DHT11数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器。本文的目标是在CW32F030C8T6开发板上实现读取温湿度的功能。

低成本搭建网络,远距离传输达4.8km的LoRaWAN模块
安信可科技推出了Ra-08/Ra-08H系列LoRaWAN模组,具备低功耗、远距离传输等特性,适用于物联网应用。这些模组基于ASR6601CB芯片,内置128KB Flash和16KB SRAM,支持多种调制模式和接口,简化了开发流程。然而,Ra-08需通过LoRaWAN网关进行数据传输,且不支持Arduino开发。

东胜物联恩智浦NXP系列核心板,打造最优质的物联网与工业自动化解决方案
在这个日新月异的智能时代,东胜物联以卓越的恩智浦NXP i.MX系列核心板为基石,致力于为您打造最优质的物联网与工业自动化解决方案。本篇将对东胜物联推出的恩智浦核心板进行全面盘点,助您找到最适合的那一款。

【CW32模块使用】雨滴传感器
文章介绍了雨滴传感器的工作原理和在汽车智能灯光系统、自动雨刷系统、智能车窗系统中的应用。传感器通过检测水滴的导电性来判断是否下雨,利用电极间的电导性变化来测量水滴存在。文章还提供了传感器模块的移植过程和代码示例,展示了如何将传感器数据读取和处理集成到CW32F030C8T6开发板上。

【CW32模块使用】SHT30温湿度传感器
SHT30是一款IIC通信的温湿度传感器,支持-40~125℃温度和0~100%RH湿度测量,精度高。通过移植例程至CW32F030C8T6开发板,实现了每秒读取温湿度并通过串口输出的功能。

【产品】有垂直接插/水平接插方式的FPC/FFC用连接器6817系列,适用于工业机器人自动化组装
京瓷(Kyocera)新推出的FPC/FFC用连接器6817系列产品,采用京瓷开发的锁定机构,具有高速传输等特点,适用于工业机器人自动化组装。本系列产品的接插方式分两种类型,一种是FPC/FFC与基板垂直接插的垂直式:板上高度5.32mm,宽度3.0mm,另一种是FPC/FFC与基板平行接插的水平式:板上高度2.6mm,宽度5.9mm。上述产品设计可以有效节省空间。

先楫半导体HPM APPS v1.7.0上线啦!
先楫半导体发布了HPM APPS v1.7.0,包含多项更新和新功能,如HPM双网口环网通信方案、Ethercat主站应用方案、I2S DMA CHAIN应用方案、hpm_monitor服务、SPI控制器操作Nor flash应用案例等。这些更新旨在提升微控制器性能,简化开发过程,并加速程序开发。

电子商城






现货市场

服务
提供7~27寸工控机定制,支持嵌⼊式/ 壁挂式 /桌⾯式/悬挂式等安装方式,采用纯平⾯板IP65防尘防⽔等级,莫⽒7级硬度触摸屏,兼容多种操作系统:组态软件/安卓/XP/win7/8/10/Linux等,支持主板、接⼝、外观、⽀架、刷卡器、⾝份证阅读器、LOGO、⻨克⻛、系统、电池、蓝⽛、4G/5G、摄像头、GPS系统、⼆维码扫描器、指纹等特殊应⽤场景定制
最小起订量: 1台 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论