【经验】近距激光雷达传感器TF-Luna用于开源飞控pixhawk的Mission Planner配置说明


北醒近距激光雷达传感器TF-Luna 可以直接连接 Pixhawk 的串口使用。飞行器可以使用 TF-Luna 来实现定高或者避障功能。
本文档适用于 pixhawk ArduCopter V4.0.0 或更高版固件。
连接 Pixhawk 方式示例:

a)TF-Luna 用于 pixhawk 定高应用的 Mission Planner 配置说明
将飞控连至 MP。注意:雷达安装高度应大于雷达盲区。在下面的【CONFIG/TUNING】栏里面选择左侧的【Full Parameter List】,找到并修改下面几个参数:
SERIAL2_PROTOCOL = 9 【SERIAL2 端口选择为 Rangefinder 类型】
SERIAL2_BAUD = 115 【输入雷达当前波特率,如未更改,输入雷达默认波特率 115200,即115】
RNGFND_TYPE = 20 【与 TFmini 选项相同】
RNGFND_MIN_CM =20 【雷达有效读取最小距离,单位 cm,可以根据实际需求调整,此数值应大于雷达盲区】
RNGFND_MAX_CM = 200 【雷达有效读取最大距离,单位 cm,可以根据实际需求调整,但应小于雷达有效最大量程】
RNGFND_GNDCLEAR = 15 【无人机落地后雷达显示的距离,单位是 cm,取决于模块安装高度,此数值应大于雷达盲区】
RNGFND_ORIENT=25 【雷达向下安装】
PRX_TYPE=0
设置好这几个参数后,点击软件右侧的【Write Params】即可。
如果出现“Bad Lidar Health”错误,请检查是否连接正确、供电是否正常,然后重启飞控。
如何查看雷达定高的距离显示:双击 Mission Planner 左下面板空白处,如下图:

选择 sonarrange 选项,如下图:

主面板上将会显示雷达定高的具体距离在 Sonar Range(meters)处,如下图:

b)TF-Luna 用于 pixhawk 避障应用的 Mission Planner 配置说明
目前,仅建议在 Loiter 模式下使用,使用方法如下:
将飞控连至 MP。注意:雷达前方到无人机边缘应大于雷达盲区。在下面的【CONFIG/TUNING】栏里面选择左侧的【Full Parameter List】,找到并修改下面几个参数:
AVOID_MARGIN=3 【Loiter 模式下无人机离目标的响应距离,单位:m,根据需要设置避障距离】
SERIAL2_PROTOCOL = 9 【SERIAL2 端口选择为 Rangefinder 类型】
SERIAL2_BAUD = 115 【输入雷达当前波特率,如未更改,输入雷达默认波特率 115200,即115】
RNGFND_TYPE = 20 【与 TFmini 选项相同】
RNGFND_MIN_CM = 20 【雷达有效读取最小距离,单位 cm,可以根据实际需求调整,此数值应大于雷达盲区】
RNGFND_MAX_CM = 200 【雷达有效读取最大距离,单位 cm,可以根据实际需求调整,但应小于雷达有效最大量程】
RNGFND_GNDCLEAR = 15 【无人机落地后雷达显示的距离,单位是 cm,取决于模块安装高度,此数值应大于雷达盲区】
RNGFND_ORIENT=0 【根据雷达实际安装方向选择,0 为前向,目前支持 0~7,详见 MP 说明】
PRX_TYPE=4 【避障模式下 proximity sensor 需要选择 RangeFinder】
设置好这几个参数后,点击软件右侧的【Write Params】即可。
如果出现“Bad Lidar Health”错误,请检查是否连接正确、供电是否正常,然后重启飞控。
如何查看避障的距离显示:(避障的距离不会显示在 Sonar Range 一栏)在主界面按住 Ctrl+F,会出现以下窗口:
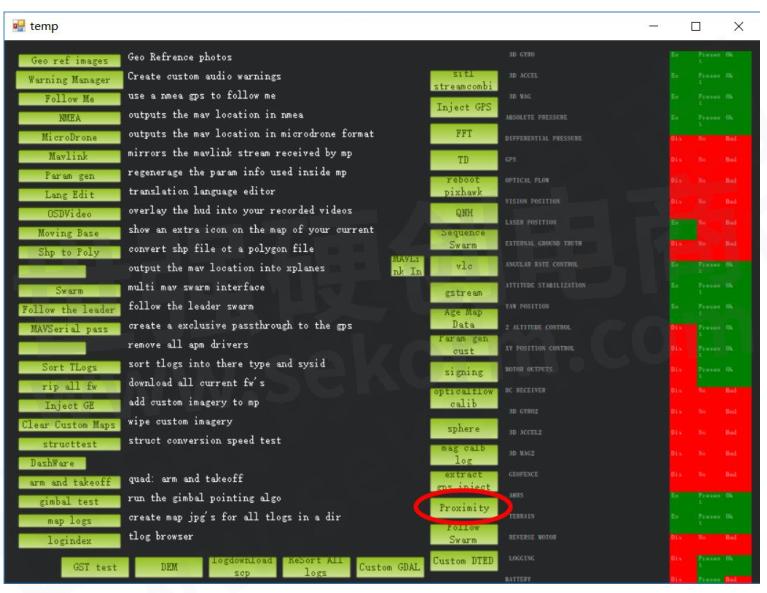
点击 Proximity 按钮,会出现如下窗口:
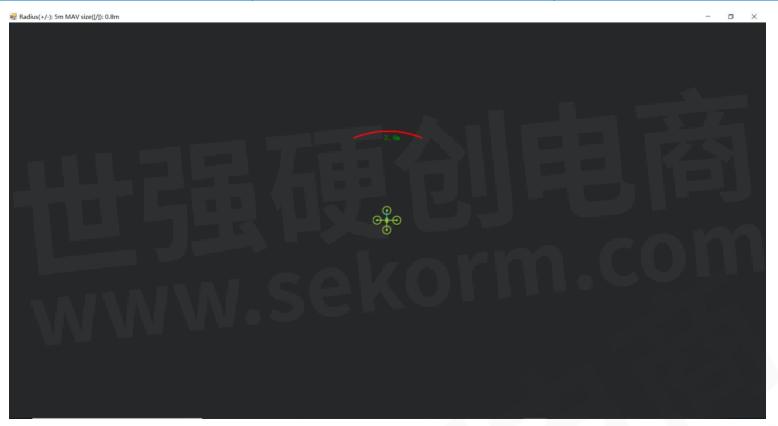
绿色数字即为雷达探测到的具体距离(v1.3.48 版本以下的 Mission Planner 只有此窗口关闭、打开、放大、缩小时此数字才会刷新,但不影响雷达避障探测的数据刷新,及时更新 Mission Planner即可)
附:如果 TELEM 2 接口被占用,可以连接 Pixhawk 的 SERIAL4/5 接口,如下图,其它设置与以上相同

将飞控连至 MP,在下面的【CONFIG/TUNING】栏里面选择左侧的【Full Parameter List】,找到并修改下面几个参数:
SERIAL4_PROTOCOL = 9
SERIAL4_BAUD = 115
其他参数配置同 TF-Luna 连接 Pixhawk 的 TELEM2(串口 2)在定高/避障应用下 Mission Planner配置说明,设置好参数后,点击软件右侧的【Write Params】即可。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由LTT转载自北醒,原文标题为:TF-Luna在开源飞控pixhawk上的应用,本站所有转载文章系出于传递更多信息之目的,且明确注明来源,不希望被转载的媒体或个人可与我们联系,我们将立即进行删除处理。
相关推荐

How to Apply Low-cost Single-point LiDARs for Coal-flow Volume Measurement
Benewake has launched a special module: “Low-cost single-point LiDARs coal-flow volume detection system“, this system can realize the real-time monitoring and statistics of the volume of coal transported by the conveyor belt during coal loading and coal pile transportation.

【经验】北醒TF系列激光雷达如何与F4飞控建立通讯?
在无人机高级飞行中,为了实现异地高精度自主起降(尤其是固定翼无人机),可以采用北醒TF系列激光雷达与F4飞控建立通讯,实现精准定高和避障功能。本文将给出建立通讯的详细方案。

北醒(Benewake)激光雷达传感器选型指南
目录- 公司简介 短距系列激光雷达模组测距传感器 中距系列激光雷达测距传感器 长距系列激光雷达测距传感器 工业版激光雷达测距传感器 选型参数对比表
型号- CE30,HORN-X,HORN,HORN系列,TF02-PRO,HORN-X2 PRO,TF40,TF-LUNA,TFMINI,HORN-RT,TFMINI PLUS,TF,TF03,TF03-180,TF02,TF-LUNA-PARKING,TFMINI-I,TF02-I,TF系列,TF03-100,TF350,TFMINI-S

北醒激光雷达距离传感器选型表
提供北醒激光雷达距离传感器选型, 测量范围:0.04m~350m@90%反射率;0.04m~40m@10%反射率, 帧率:1-1000Hz, 距离分辨率:1cm, 刷新率:20~30fps, 视场角:0.5°~ 132°x9°, 输出数据:单点距离值、ROI区域内障碍物距离值和角度值、点云数据, 通信:UART; I²C; I/O; RS485; RS232; CAN; TCP; UDP.
|
产品型号
|
品类
|
测量范围@90%反射率
|
帧率
|
距离分辨率
|
准确度
|
准确率补充
|
视场角
|
输出数据
|
通信
|
输入电压
|
功耗
|
尺寸(长*宽*高)
|
重量
|
|
TFMINI-S_UART-IIC-I/O
|
近距离激光雷达传感器
|
0.1m~12m
|
1-1000Hz
|
1cm
|
±6cm@(0.1m-6m)
|
±1%@(6m-12m)
|
2°
|
单点距离值
|
UART;I²C;I/O
|
5V±0.1V
|
≤0.7W
|
42mm*15mm*16mm
|
5g±0.3g
|
选型表 - 北醒 立即选型

TF-Luna产品手册
描述- 本资料为Benewake (Beijing) Co. Ltd.生产的TF-Luna激光雷达模块的产品手册。手册详细介绍了TF-Luna模块的安装、操作、功能描述、配置方法以及常见问题解答。TF-Luna模块采用飞行时间(ToF)原理进行距离测量,具有高精度、高重复性、低功耗等特点,适用于多种场景。
型号- TF-LUNA


北醒激光雷达工业产品及应用领域介绍
描述- 本资料主要介绍北醒研发的短距单点/中距/长距激光雷达传感器产品,以及产品应用案例分析,包括有:传送带分拨AGV避障、货箱拆卸AGV、SMT上下料AGV、物料运输AGV、立库穿梭车避障、激光导航叉车避障、消毒机器人、服务机器人农场饲料罐/陶瓷料罐料位检、塔吊预警/塔吊吊环位置检、便携安防报警器触发、手持甲烷检测仪测距、摄像头辅助对焦。
型号- TFMINI PLUS,TF02-PRO,TF03-180,TF03,TFMINI-I,TF02-I,TF40,TF-LUNA,TF03-100,TF350,TFMINI-S
SJ-Gu-TF-Luna A05 TF-Luna激光雷达模块(短距离距离传感器)产品规格书
描述- TF-Luna是一款基于TOF原理的单点测距激光雷达模块,主要用于稳定、精确和高帧率距离检测。该产品适用于各种应用环境,具有多种可调配置和参数,以在复杂应用领域和场景中提供出色的距离测量性能。
型号- SJ-GU-TF-LUNA A05,TF-LUNA

TF-Luna在开源飞控pixhawk上的应用
描述- 本文档详细介绍了北醒(北京)光子科技有限公司的TF-Luna模块在开源飞控Pixhawk上的应用,包括定高和避障功能。文档提供了连接TF-Luna到Pixhawk的具体步骤,包括配置Mission Planner中的参数,以及如何查看雷达定高和避障的距离显示。此外,还提供了当TELEM 2接口被占用时的备用连接方法。
型号- TF-LUNA

【产品】采用850nm红外光源的单点激光雷达TF-Luna,量程远至8米
北醒TF-Luna激光雷达新品是北醒累积多年研发经验和创新设计而生,沿袭了TF系列产品基于ToF时间飞行的测距原理。产品采用850nm红外光源,匹配先进的发射接收激光模块技术,辅以专业的电学设计,在保证8m量程范围的同时,又极大程度的降低了成本和功耗,可以实现非接触式的稳定、精准、高灵敏的距离测量。

北醒亮相2022 IOTE深圳物联网展,致力于为客户提供激光雷达及解决方案
2022 IOTE深圳物联网展开幕在即!北醒作为品牌参展商,致力于为客户提供激光雷达及解决方案,已形成成熟产品体系与物联网行业经验,用科技让万物联动。目前北醒TF系列产品在物联网领域已涵盖了智慧生活、智慧城市、智慧农业、智慧工业、智慧医疗、智慧教育六大模块。

【应用】北醒基于近红外ToF激光雷达提出全套料位检测方案,安装配置简单,结果真实可靠
北醒基于近红外ToF激光雷达提出了一套料位检测方案,通过北醒雷达获取准确的库存数据,方案中配备网络传输模块,最终通过终端设备,随时随地检测筒仓内的库存信息。整套方案中北醒可提供激光雷达设备、无线传输模块,以及第三方监控软件(如需独立部署北醒可提供技术支持)。

【产品】量程0.2~8米的单点测距雷达TF-Luna,功耗≤0.35W
北醒的TF-Luna是一款基于ToF原理的单点测距雷达,配合独特的光学,电学设计,可以实现稳定、精准、高灵敏的距离测量。 产品内置多种应用环境及目标的适配算法,并开放了多种可调节配置和参数。可以保证在复杂环境中具有优良的测距性能,满足客户复杂的应用场景需求。

【应用】北醒单点激光雷达用于充电桩车位占用检测,体积小易集成于充电桩内,误报率显著低于超声方案
通过在充电桩上方安装北醒单点激光雷达,可以准确探测车位上车辆的有无,有车辆进入时,可以提前唤醒充电桩进入工作状态,车辆离开车位后,可及时休眠,降低使用风险和能耗。方案优势:测距稳定性高,误报率显著低于超声等方案;FOV小,测距更精准,不受相邻车位或物体的影响。

【产品】待机功耗仅1.5mW的TF-Luna激光雷达,10000毫安的电池供电下可以持续工作1225天(约3.3年)
北醒激光雷达TF-Luna具有超低功耗模式,激光雷达默认不测距,MCU进入待机状态,待机功耗仅1.5mW。以0.1Hz(即10s系统触发激光雷达输出一次数据)的工作频率为例,平均功耗仅1.72mW,在10000毫安时的电池供电下,北醒TF-Luna激光雷达可以持续工作1225天(约3.3年)。

电子商城

服务
提供稳态、瞬态、热传导、对流散热、热辐射、热接触、和液冷等热仿真分析,通过FloTHERM软件帮助工程师在产品设计初期创建虚拟模型,对多种系统设计方案进行评估,识别潜在散热风险。
实验室地址: 深圳 提交需求>
使用FloTHERM和Smart CFD软件,提供前期热仿真模拟、结构设计调整建议、中期样品测试和后期生产供应的一站式服务,热仿真技术团队专业指导。
实验室地址: 深圳 提交需求>
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论