【经验】R CAR H3开发板上DDR4使用DRAM_Eye_Openning测试DDR4的眼图过程

R CAR H3在设计电路板,关乎系统能否正确启动的,其中除了电源部分供电,那就是DDR4的布线走线,稳定性的部分,本文记录通过瑞萨提供的DDR4测试工具DRAM_Eye_Openning测试DDR4的眼图过程。
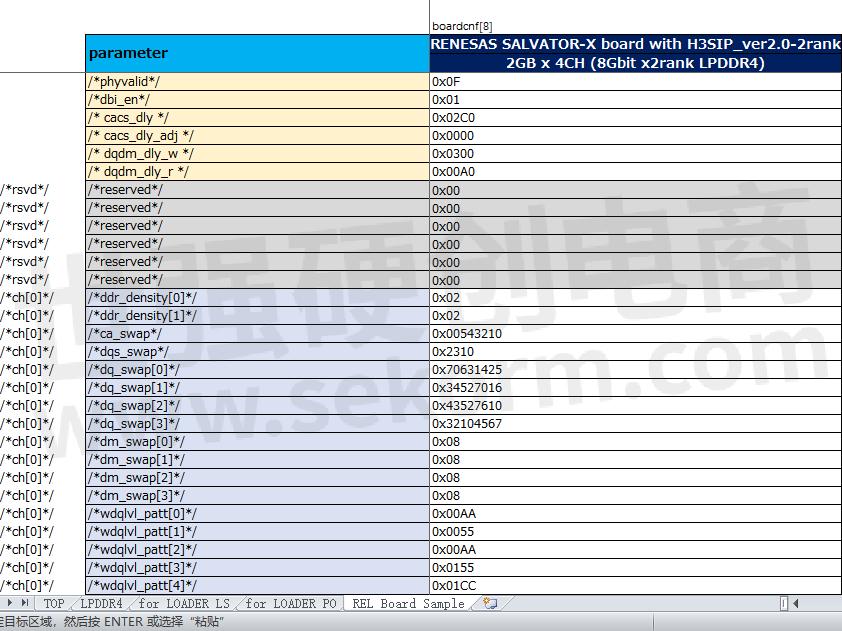
首先需要知道R CAR H3开发板SALVATOR-XS(4X2GB)的DDR4配置是第8组配置:
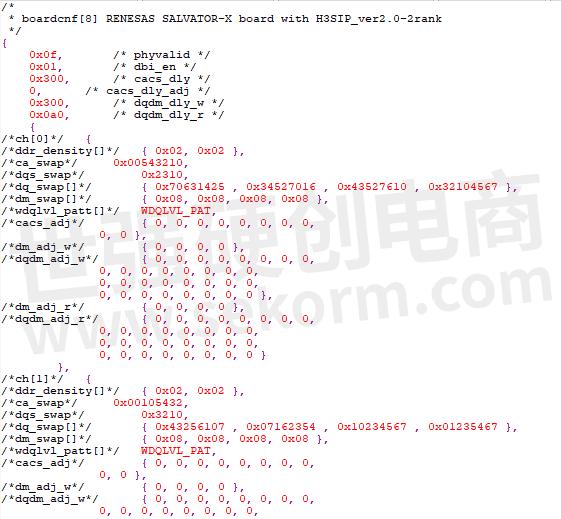
在H3 LPDDR4\support tool\LPDDR4_Board_configuration_V0.61.xlsx中有许多DDR板级配置模板,SALVATOR-XS(4X2GB)对应的是第8组:
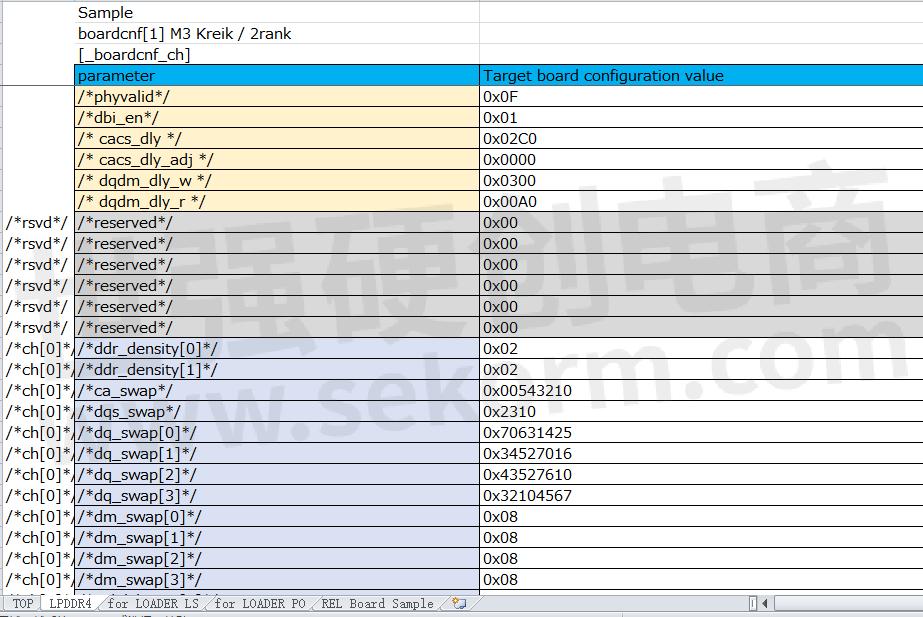
把数据copy到LPDDR4这一页:
自动生成需要烧录到板子的数据:
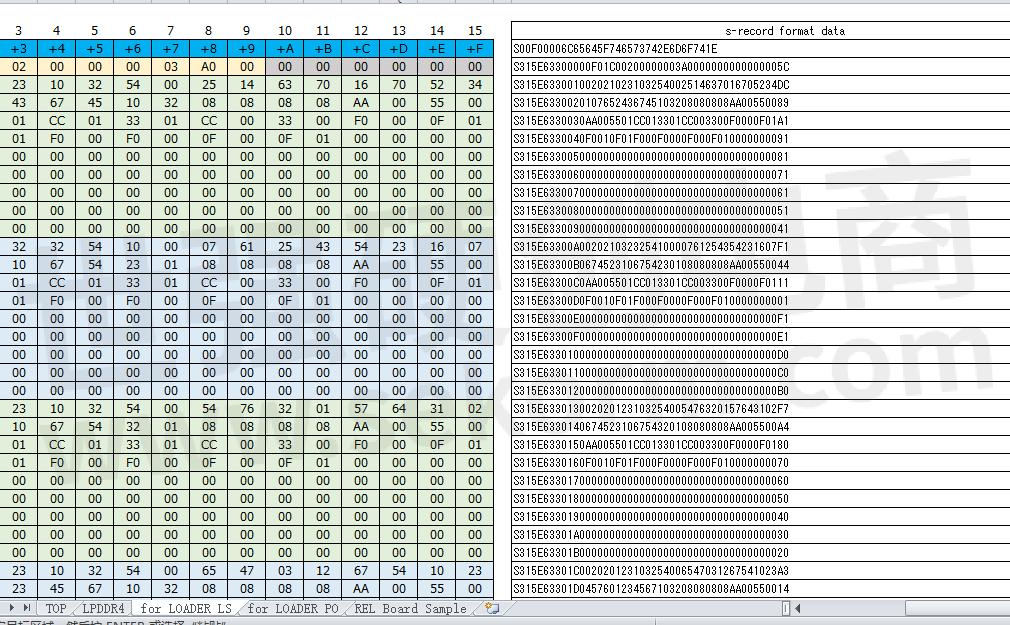
把上图右侧的数据保存到txt文件中。
下一步:开发板设置为scif启动,烧录H3 LPDDR4\eye opening tool binary\AArch64_Gen3_Scif_Loader_V0.33.mot
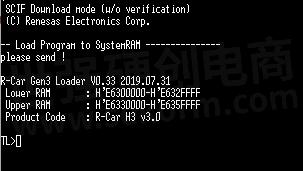
运行LS,再烧录H3 LPDDR4\eye opening tool binary\AArch64_H3v2_LP4_TestCmd_CACS_V0.93.mot,CS/CS测试命令文件,再运行LS命令,把上面保存的板级DDR配置文件烧录进去。

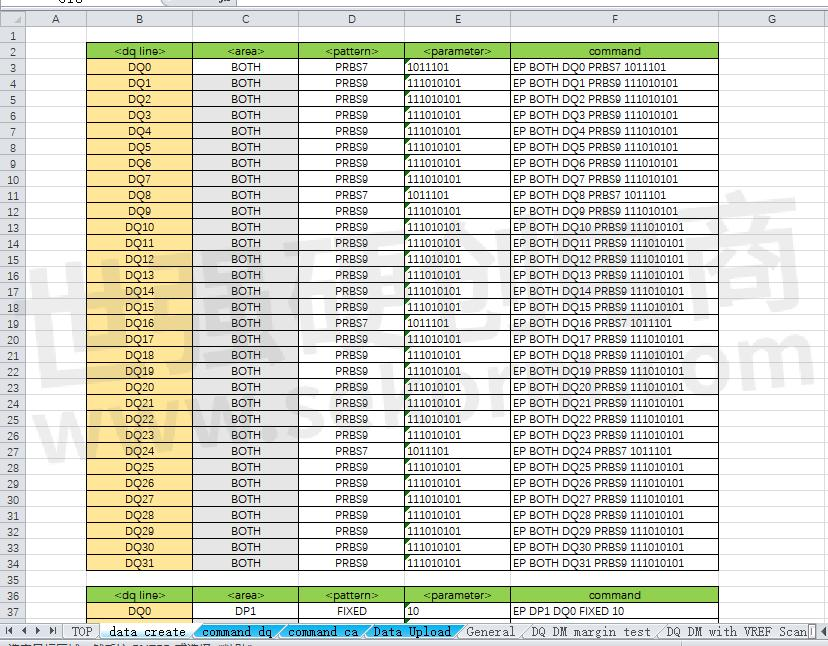
再运行LS命令烧录data pattern命令,复制下图右侧command列的所有命令,粘贴到串口控制台:
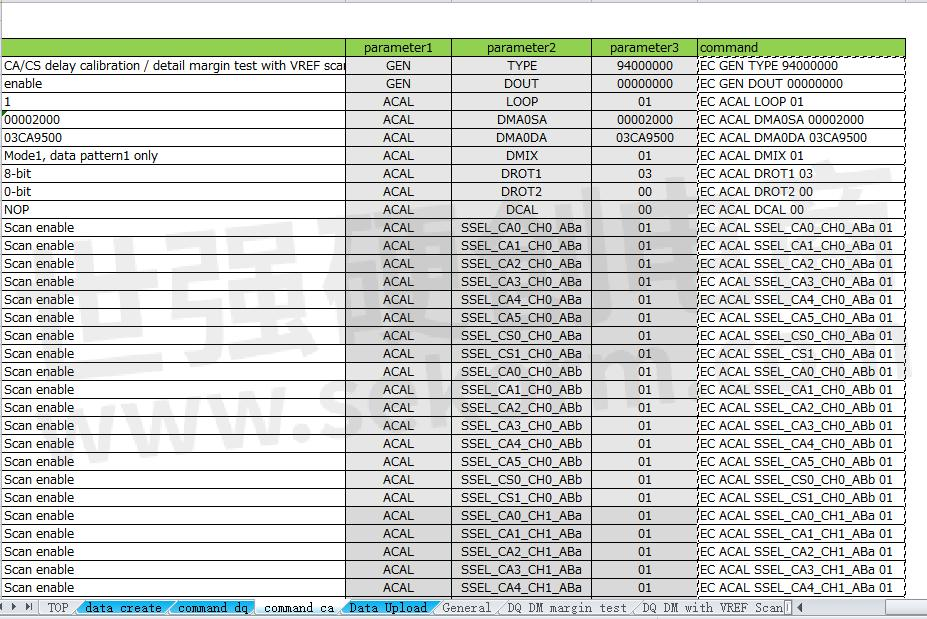
下一步运行command_ca命令:
最后运行IX命令开始测试:
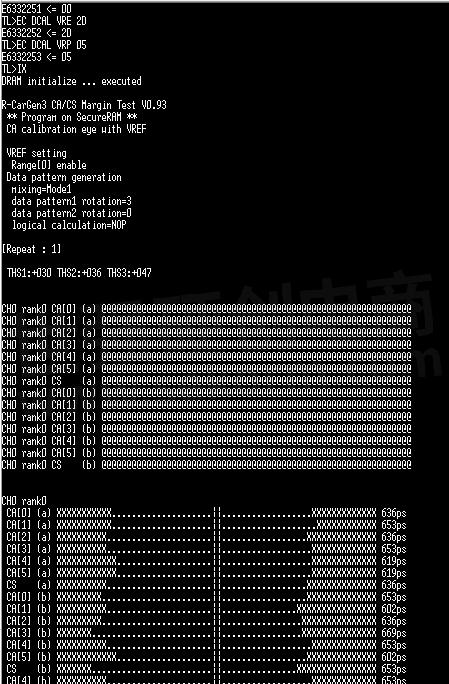
最终大概测试1个小时左右,测试完成,出眼图:
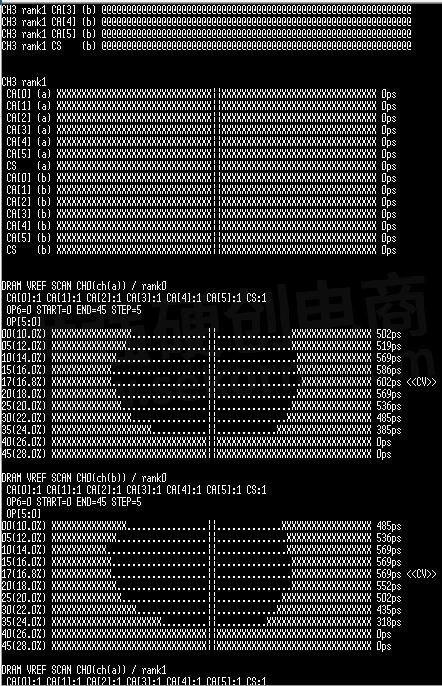
以上的眼图效果是不错的,从对称性,以及眼睛的睁开度,以及没有出现不连续的X。
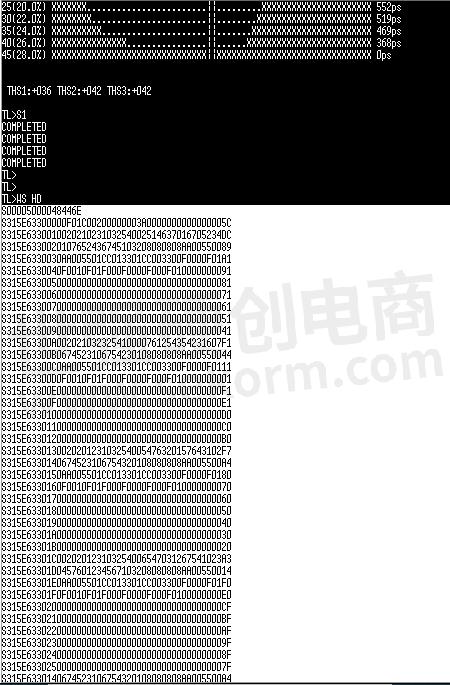
最后运行S1,再运行WS HD,并保存打印输出的数据保存到txt文件,并通过open Upload File导入到H3 LPDDR4\eye opening tool binary\LPDDR4_initilization_generator_V0.22.xlsm中,生成DDR配置参数。
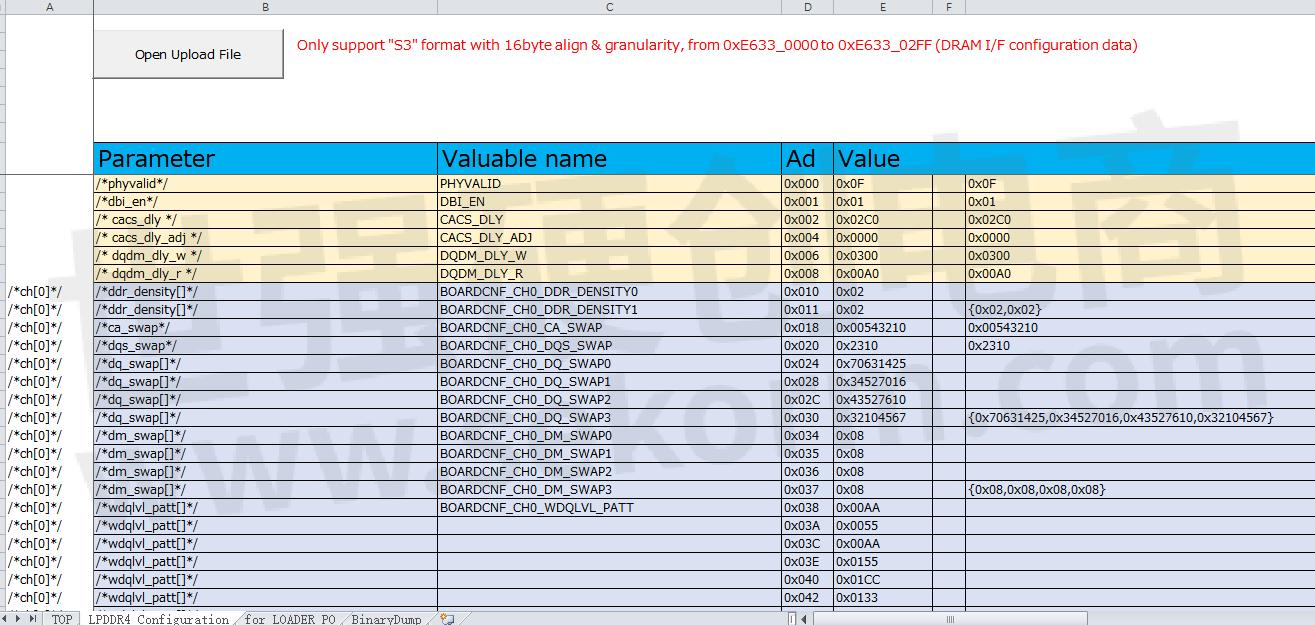
这样就可以把最终测试眼图OK的参数写入到代码中,编译运行,做压力测试对DDR,看是否OK,只有把DDR4这一步测试达到完美,那么在后面量产的时候才能有更低的不良率,顺利完成量产。
- |
- +1 赞 0
- 收藏
- 评论 0
本文由Bill提供,版权归世强硬创平台所有,非经授权,任何媒体、网站或个人不得转载,授权转载时须注明“来源:世强硬创平台”。
相关推荐

【经验】主流智能驾驶舱SOC CPU,GPU算力性能对比,瑞萨R CAR H3经过了大量的市场验证
R CAR H3/H3N/M3W作为瑞萨R CAR系列智能驾驶舱的常用型号,研发人员通常除了关注主要的接口参数,更多的需要评估其性能,算力方面的数据,本文具体描述以上几款主流的智能驾驶舱SOC的CPU、GPU等方面的算力情况。

【经验】快速倒车功能开发:CVBS摄像头接入decoder芯片转BT656接入到R CAR H3后DU显示输出的修改点
驾驶舱系统一般都需要做快速倒车显示功能,Renesas R CAR H3开发快速倒车功能的时候使用的是R7核跑freertos,在freertos中操作摄像头输入,以及DU显示来实现快速显示倒车摄像头视频,本文记录在开发CVBS摄像头接入decoder芯片转BT656接入到R CAR H3后,通过DU显示输出的修改点。

【经验】瑞萨开发板R CAR H3 root密码不对无法进入linux文件系统的解决过程
在瑞萨开发板R CAR H3的DEMO板上烧录系统后可以正常启动linux,需要root密码无法进入文件系统,本文记录了R CAR H3 root密码不对无法进入linux文件系统的解决过程。

【经验】R CAR H3的EMMC位宽模式切换方法
瑞萨电子R CAR H3开发EMMC的时候,EMMC通常是8bit模式,也可以4bit模式,hs200,hs400两种速度模式,那么在某些情况下,会出现EMMC模式初始化失败的情况,此时可以在8bit和4bit模式之间切换,来排除一些硬件上的问题。

【经验】R CAR H3的LINUX桌面系统可以使用Wayland(weston)但不能显示的解决过程
Renesas R CAR H3的LINUX桌面系统可以使用Wayland(weston),在salvator-xs开发板上把weston桌面以及应用程序跑起来是需要实践一下的,本文解决在实际操作过程中不能显示桌面,运行weston出错等一系列问题。

【经验】瑞萨R CAR H3开发板usb OTG模拟为存储设备的验证方法
采用R CAR E3e把usb2.0 ch0作为OTG使用,需要验证slave模式下接入PC端可以检测到并做大数据从PC端和R CAR E3e之间数据传输验证,本文将解析瑞萨R CAR H3开发板上来验证此功能的方法。

【经验】R CAR H3的安卓系统开发环境中各种模块的编译方法
R CAR H3的安卓系统开发环境的编译,往往需要非常长的时间,而且很多没有接触过安卓开发的研发,更是不知道如何单独编译R CAR H3的安卓环境的各个模块,本文详细记录R CAR H3的安卓系统开发环境中各种模块的编译方法,以及相关需要设置的变量。

【经验】解决R CAR H3烧录minimonitor后报错,无法运行的问题
R CAR H3主要用于智能驾驶舱的主控平台,在开发过程中有时候会遇到通过串口启动,烧录minimonitor后报错,无法运行minimonitor程序,这里通常需要确认是软件还是硬件原因,本文记录解决这个问题的方法。

【经验】R CAR H3的USB2.0 CH0 OTG slave功能USB Gadget驱动的加载过程
Renesas R CAR H3的USB2.0 CH0可以作为普通的HOST功能,在做OTG SLAVE功能时,需要把R CAR H3开发板作为slave,并作为一个USB Gadget设备才能被USB HOST检测到,本文记录了USB Gadget驱动的加载过程。

【经验】R CAR H3的SPI接口介绍及注意事项
R-Car H3是Renesas第三代R-Car汽车自动驾驶平台解决方案,64位ARM架构体系,八核处理器,四个Cortex-A57,四个Cortex-A53,还有一个用于实时处理的双锁步Cortex-R7内核,以及 PowerVR Series6XT GX6650 3D图像加速引擎,频率600MHZ。 本文主要介绍R CAR H3的SPI接口。

【经验】R CAR H3的GPU实际效果测试操作过程
R CAR H3的GPU采用的PowerVR GX6650,底层是GPU驱动,DRM+DMS驱动,应用层是libdrm,opengl es,以及基于opengl es的app来操作R CAR H3的GPU实现图像的快速渲染和高清复杂图像的加速渲染,本文是R CAR H3的GPU实际操作过程和理论的结合,帮助工程师形象理解。

【经验】R CAR H3平台的交叉编译canutils,以及和iproute的使用
R CAR H3的can总线测试,通常用到的应用层测试工具采用开源的iproute和canutils,本文主要解释下这些工具在R CAR H3平台的交叉编译

【经验】R CAR H3的yocto软件包fetch fail手动解决方法
瑞萨电子R CAR H3的yocto下载编译时间很长,经常出现失败,从而导致软件开发陷入到这些繁杂的前期开发环境整备中,本文记录在yocto下载编译过程中出现fetch fail时,如何手动单独下载,处理这种错误。

【经验】R-Car H3的IR 接收模块介绍
R-Car H3是Renesas第三代R-Car汽车自动驾驶平台解决方案。本文介绍整个IR接收模块的主要内容,在使用R CAR H3做IR接收时,参考以上内容就基本可以明白IR接收的流程,节约工程师的开发时间。

R CAR H3 HDMI串行输出没有显示问题解决方法
R CAR H3在开发驾驶舱时,通常会需要通过TI的DS90UB949TRGCRQ1把R CAR H3的HDMI信号串行化为fpdlink信号,传给液晶屏显示,本文记录了串行输出没有显示的问题及解决办法。

电子商城

现货市场
授权代理品牌:集成电路
























































授权代理品牌:分立元件






































授权代理品牌:接插件及结构件













授权代理品牌:部件、组件及配件




























授权代理品牌:电源及模块





授权代理品牌:电子材料














授权代理品牌:仪器仪表及测试配组件




授权代理品牌:电工工具及材料






授权代理品牌:机械电子元件








授权代理品牌:加工与定制












登录 | 立即注册
提交评论